スペース制限の設定
スペース制限のワークセル項目(Workcell Item)は、ロボットの最も外側のゾーンに仮想境界を設定します。スペース制限なしでロボットを操作することができますが、安全にロボットを操作するためにスペース制限を設定することをお勧めします。
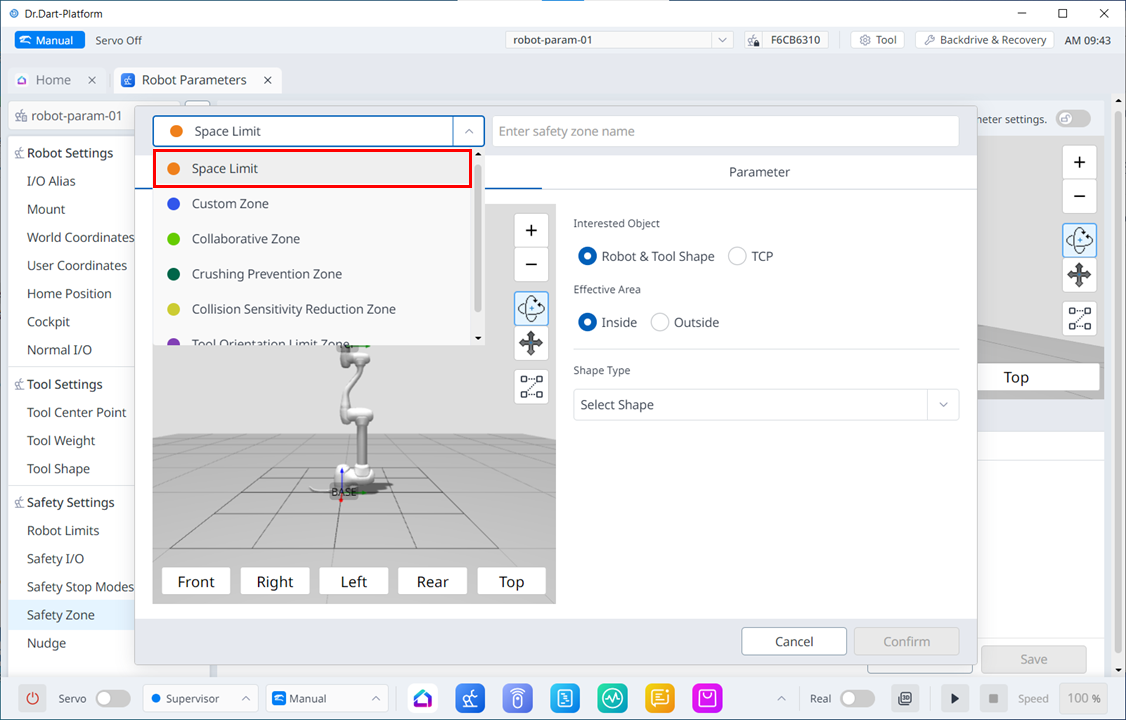
スペース制限には 、ロボットパラメーター(Robot Parameters)>安全設定(Safety Settings)>安全ワークスペース(Safety Workspaces)>新規ワークスペースを追加(Add New Workspace)の左上にあるドロップダウンメニューを使用して到達できます。シェイプタイプ(Shape type)で、球(Sphere)、円筒(Cylinder)、立方体(Cube)、
- 検査点はロボットまたはTCPとして設定でき、有効なスペースは内部または外部として設定できます。
- 監視ゾーンはロボットまたはTCPとして設定できます。内部ゾーンと外部ゾーンのどちらを検出するかを設定します。
- デフォルト値は、ゾーン全体と設定された内部です。
- ロボットは、設定された安全ゾーンに配置した後、適切に設定できます。
ロボットのスペース制限を設定するには、 セーフティワークスペース(Safety Workspaces)で 新規ワークスペースを追加 (Add New Workspace)ボタンをタップし、 形状タイプ(Shape Type)で 次のいずれかのタイプを選択します。立方体(Cube)、 シリンダ(Cylinder)、 複数平面ボックス(Multi-plane Box)、 球(Sphere)、 または傾斜立方体(Tilt安全パスワードは、セットアップおよびイネーブル化の際に必要です。