コクピットボタンを使用する(5ボタン)
コクピットのハンドガイディングボタンやユーザー設定ボタンを押した状態で、ユーザーが直接ロボットのポーズを変更できます。
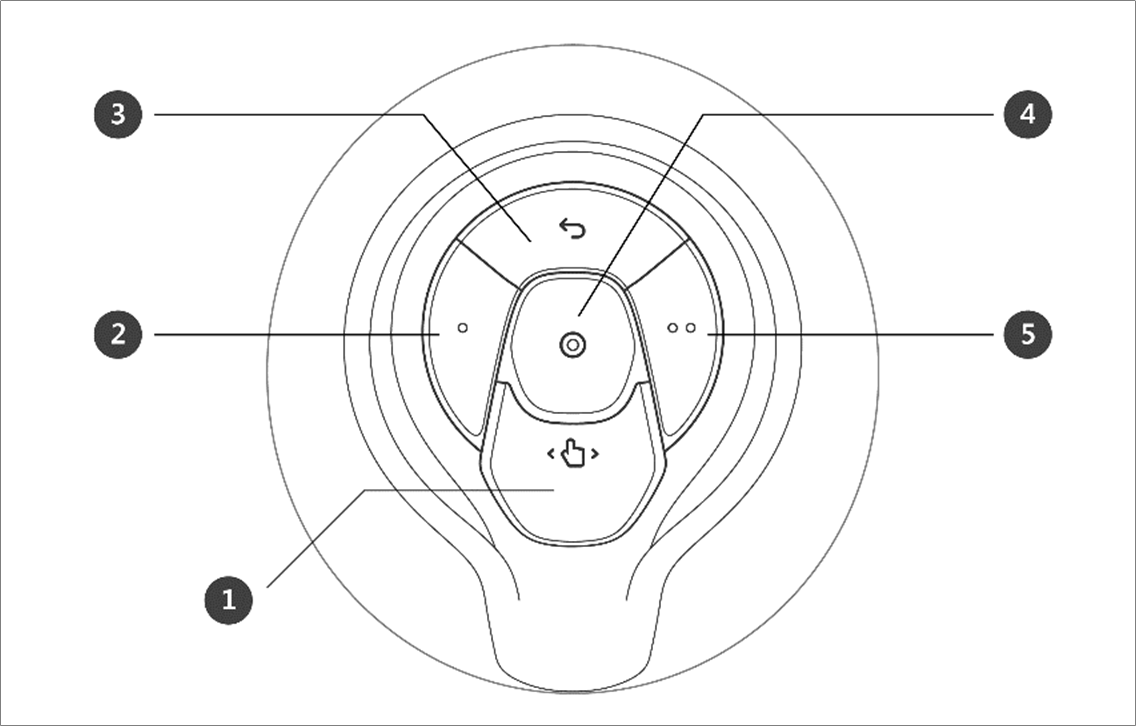
番号 | 項目 | 説明 |
|---|---|---|
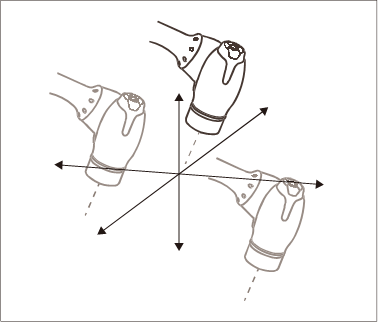
1 | Hand-Guiding Button | ロボットのポーズをあらゆる方向に自由に変更できます。 |
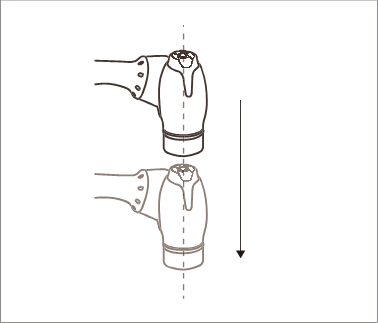
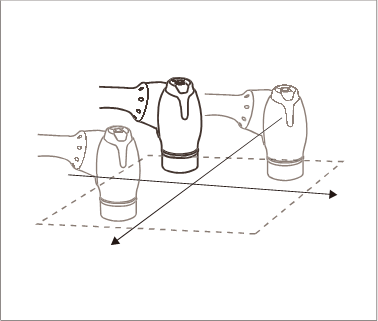
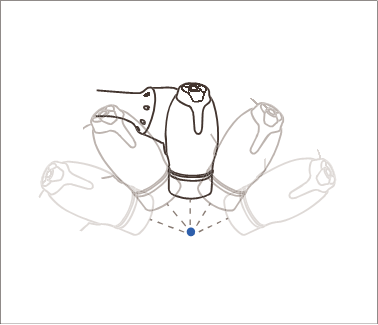
2,5 | User Setting Button | ロボットのポーズを、割り当てられたモードに該当する固定条件によって直接入力して変更できます。
設定方法についての詳細は、“コクピットを設定する”を参照してください。 |
3 | Cancel Button | 直近の保存ポーズを削除します。 |
4 | Save Pose Button | 現在のロボットのポーズを保存します。詳細は“コクピットボタンを利用したスキル命令語の作業点を設定する”を参照してください。 |