
手動操作 - ジョグの使用方法を学習します
必須 標準( NORMAL ) 15 分
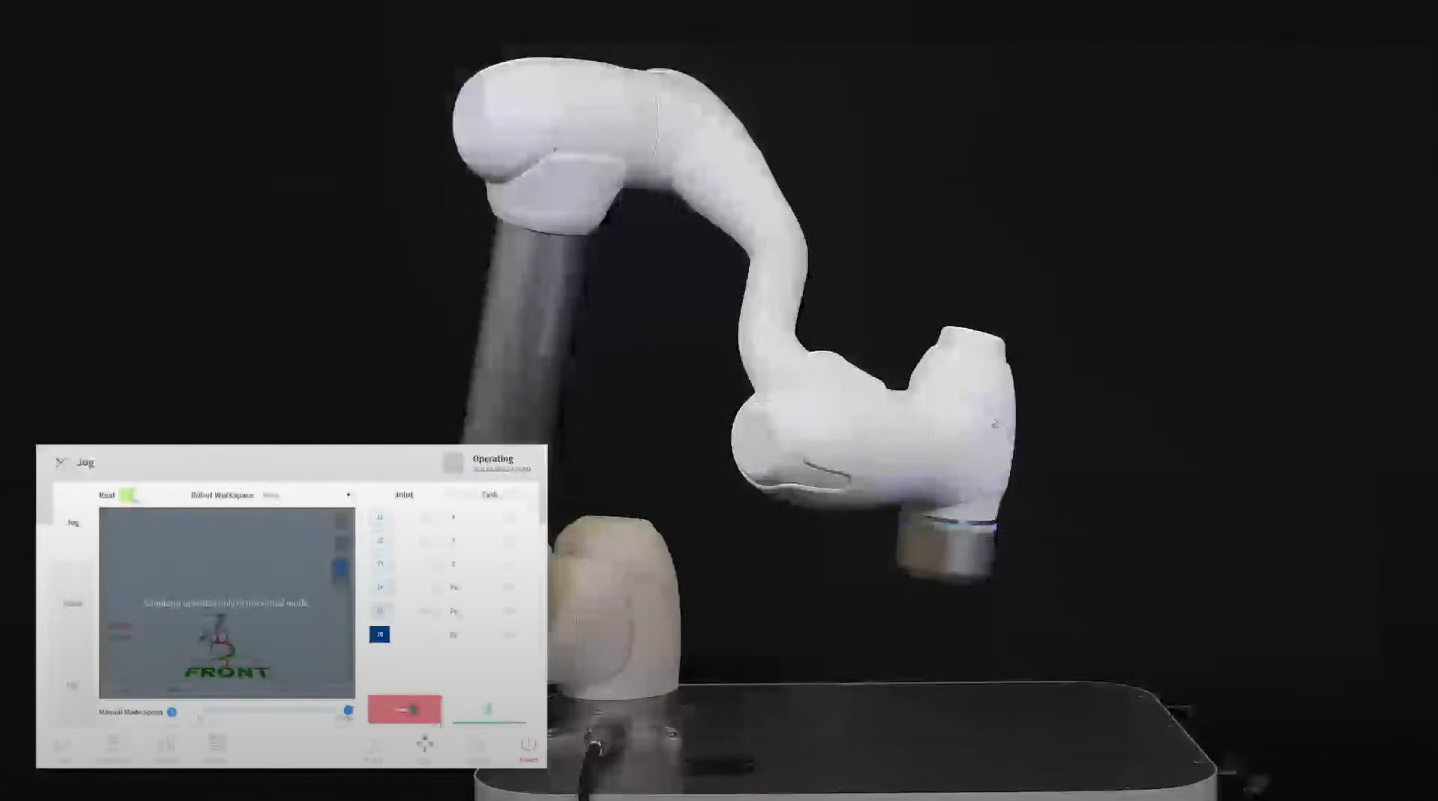
ユーザーは、 [ ジョグ( Jog ) ] タブから手動移動方法を選択できます。ジョグ / 移動 / 位置合わせの詳細については、を参照 ジョグを使用するしてください。
- ジョグ:ロボットジョイントまたは TCP を、ユーザーが選択したジョイント軸または座標軸に移動します
- 移動:ロボットジョイントまたは TCP を、ユーザーが入力したターゲット点に移動します
- 位置合わせ:ロボットの端を、ユーザーが選択した平面に垂直な平面に移動し、座標軸をロボットの端に平行に移動します
ロボットの移動は 2 つのタイプで構成されています
- ジョイント動作:各ジョイントは、回転動作によって直線的に移動します
- タスクモーション:終点はターゲット点に直線的に移動します
ジョグ画面からジョイント動作を使用してロボットを移動する方法を次に示します。
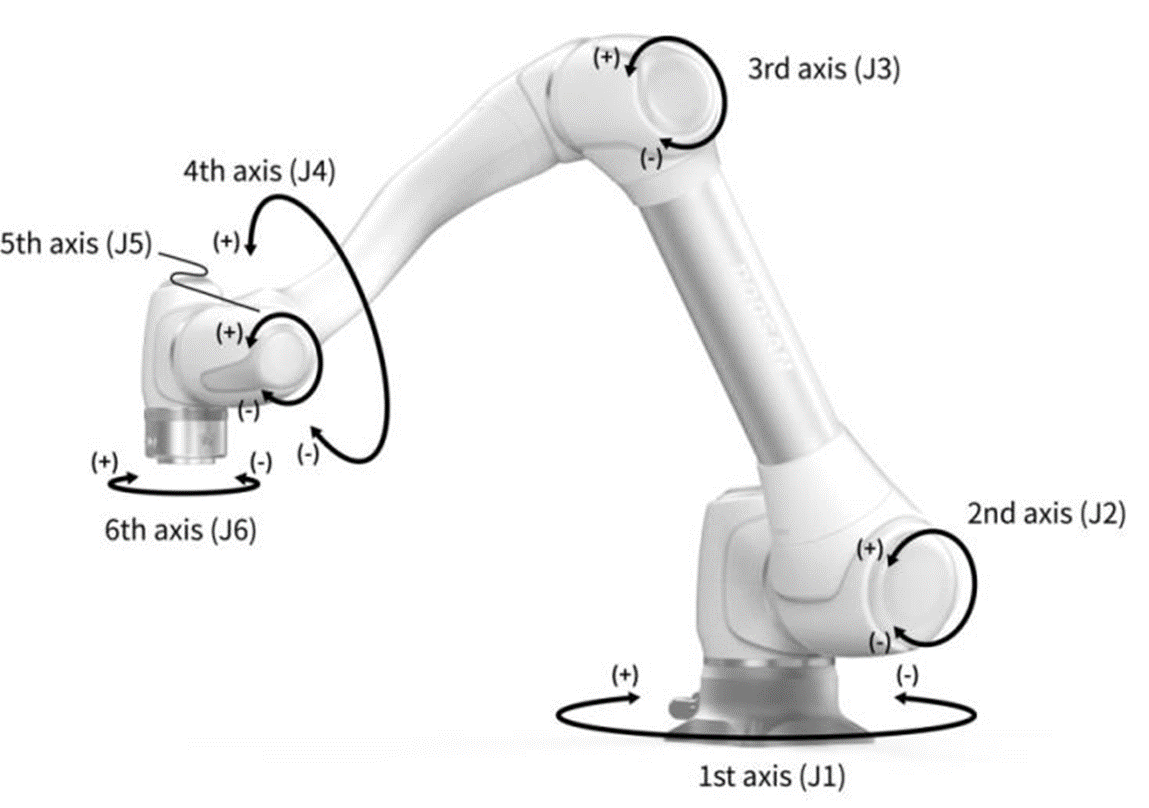
- [ ジョイント( Joint ) ] タブを選択する。
- 移動する軸を選択します。たとえば、 J1 を選択できます。
- +/- ボタンを押してロボットを移動します。+/- ボタンを押している間にロボットが移動し、現在の位置がリアルタイムで画面に表示されます。
ジョグ画面でタスクモーションを使用してロボットを移動する方法を次に示します。
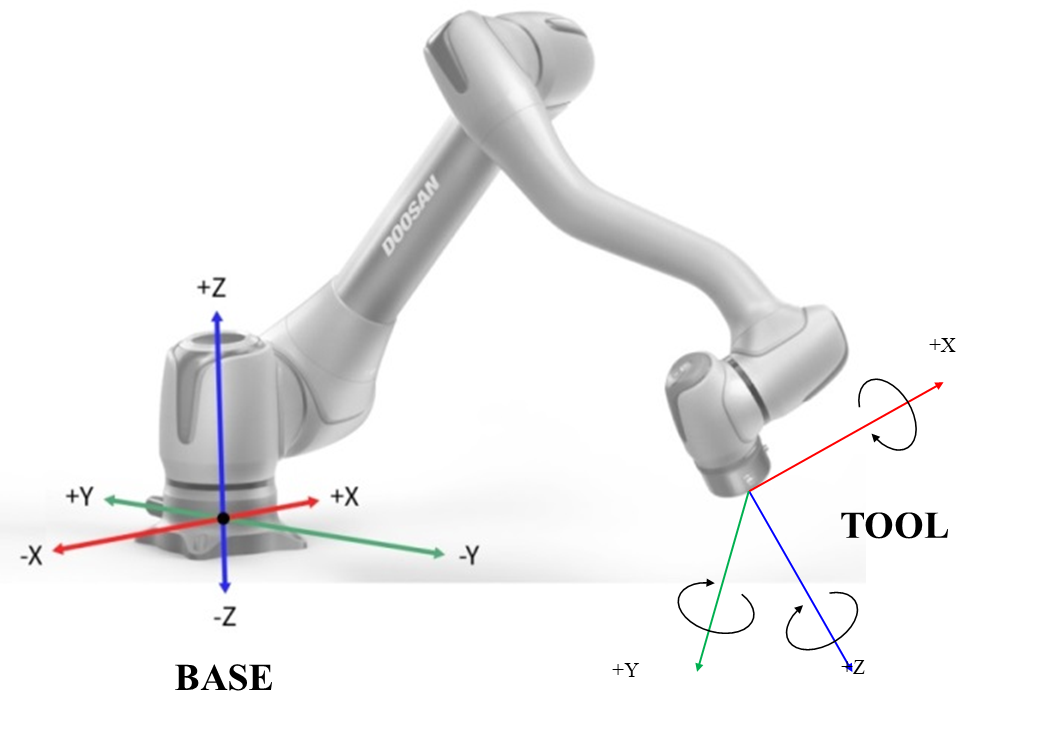
- ベース座標を選択します。ロボットは、ベース座標または工具座標に従って移動できます。
- 移動する方向を選択します。たとえば、 X 軸を選択できます。
- +/- ボタンを押してロボットを移動します。+/- ボタンを押している間にロボットが移動し、現在の位置がリアルタイムで画面に表示されます。
ジョグ移動、移動、および位置合わせの詳細については、それぞれ、およびを参照 ジョグ画面 移動画面 ソート画面 してください。
注
- ジョグ画面の左上にある実際のモードの切り替えスイッチがオフになっている場合、ロボットはジョグ画面の左側にある仮想画面でのみ移動します。実際のモード切り替えスイッチをオンにすると、実際のロボットが移動します。