
移動画面
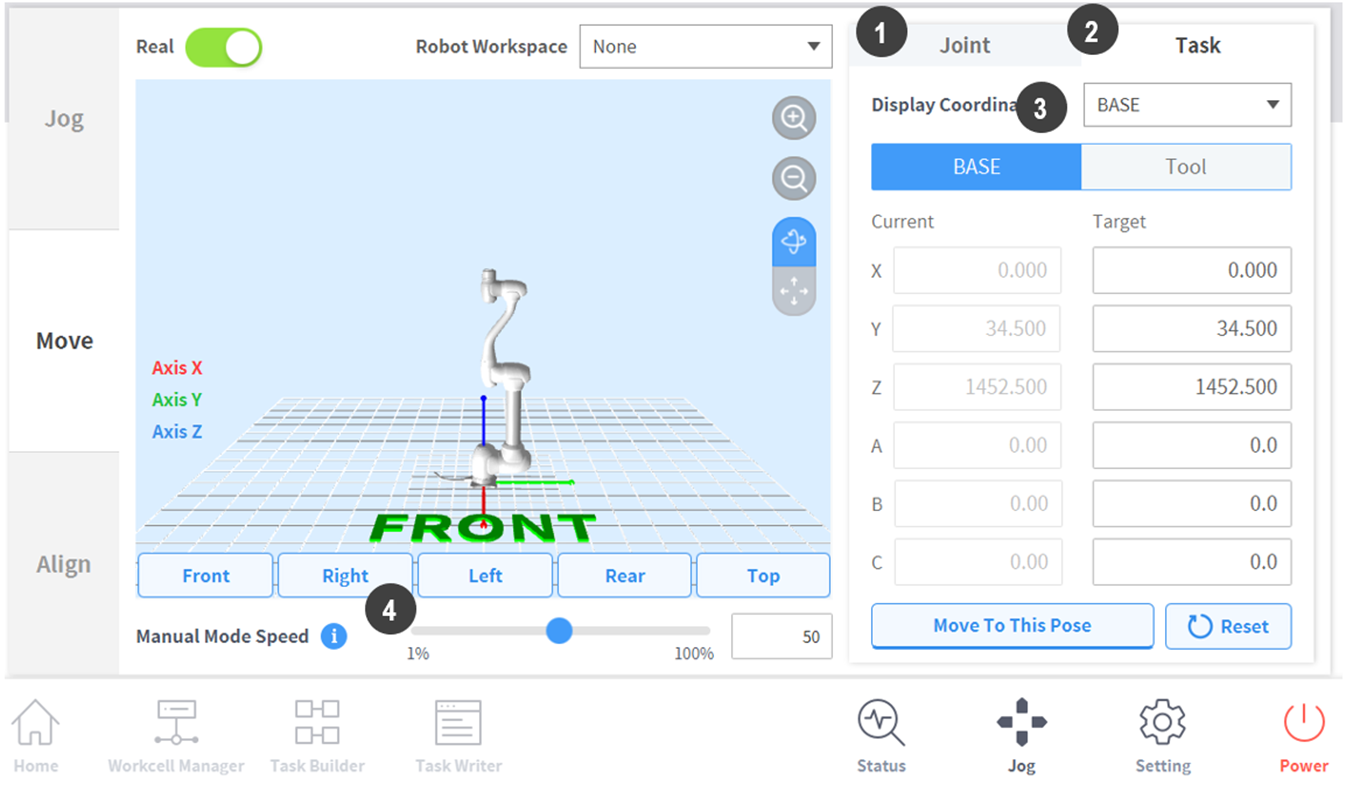
移動画面では、目標角度/座標でロボットを移動させられます。ロボットが移動すべき座標を事前に知っているか、小数点以下まで微細な移動が必要な場合、該当座標を入力すると移動できます。
番号 | 項目 | 説明 |
|---|---|---|
1 | Joint | ロボットをジョグで移動するときに使用する基準座標を設定します。 |
2 | Task | ロボットをジョグで移動するときに使用する基準角度座標を設定します。 |
3 | Reference Point Setting | タスク座標系を整列する基準点を設定します。 ベース:ロボットベースを基準にタスク座標を設定します。 ワールド:設定したワールド座標系を基準としてタスク座標を設定します。 ツール:ロボットの6軸末端のツールを基準にタスク座標を設定します。 |
4 | Manual Mode Speed | 手動モードでのロボット移動速度を設定します。スライダーポイントをドラッグして速度を調節できます。 スライダーポイントが100%であれば、移動タブでは対応するジョイントの最高速度は30 deg/sで、タスクの最高速度は250 mm/sです。この速度はジョグ及び移動ボタンの動作に影響を与えます。 |