|
No. |
項目 |
説明 |
|---|---|---|
|
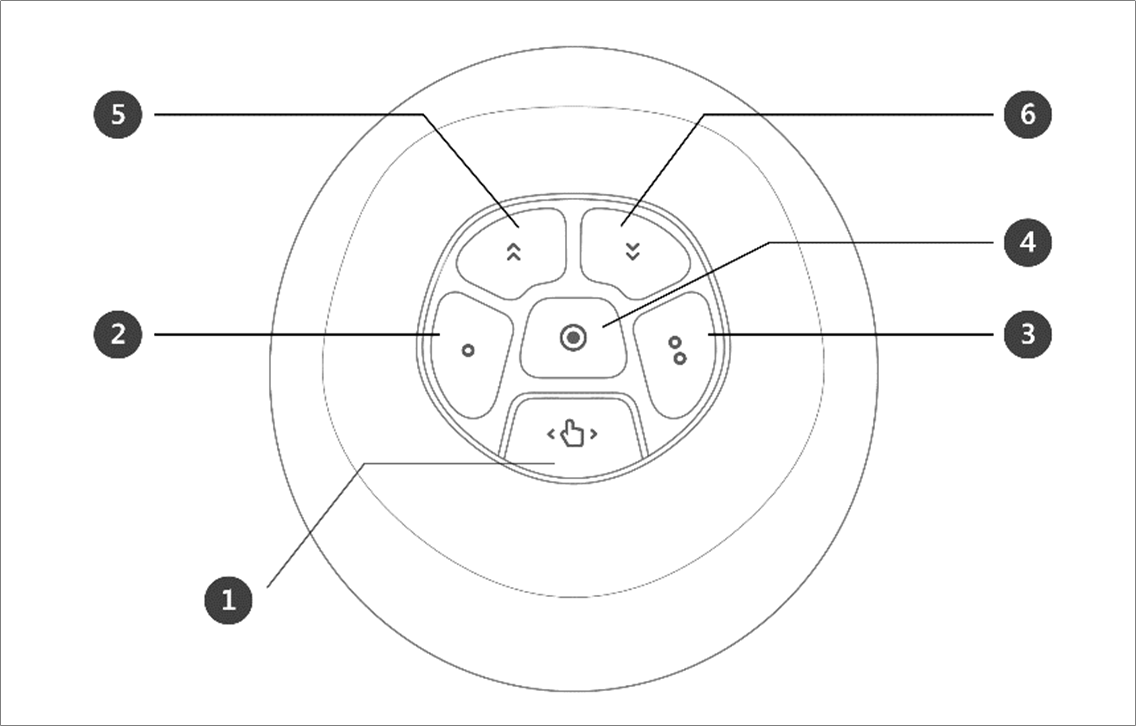
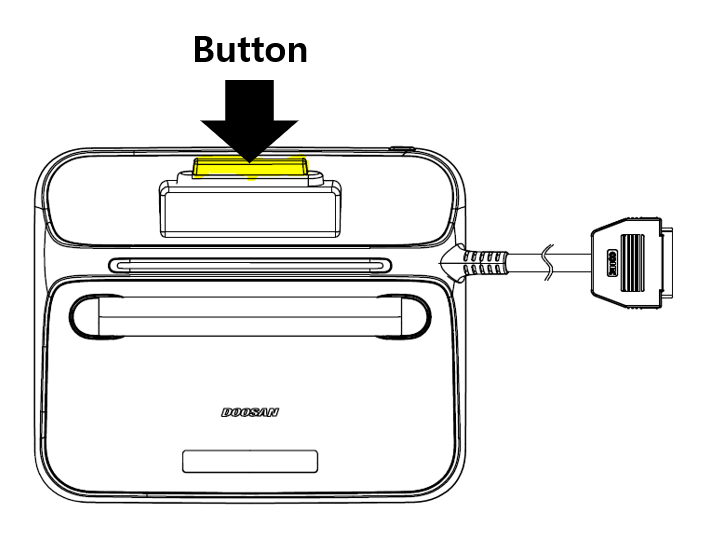
1 |
ハンドガイドボタン |
This button can be used to adjust or change the robot’s pose. |
|
2, 3 |
ユーザー設定ボタン |
このボタンは、モードに対応するロック条件に応じてポーズを入力することでロボットのポーズを変更することができる。
|
|
4 |
[Save Pose]ボタン |
現在のロボットポーズを保存する。 |
|
5 |
ワン・ラインアップ |
画面に表示されているフォーカスを1行上に移動 |
|
6 |
1つ下のライン |
画面に表示されているフォーカスを1行下に移動 |
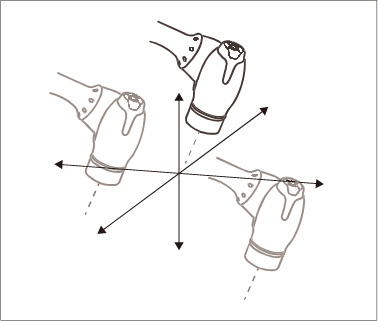
直接指導(手引き)
直接指導には2つの方法があります。
-
FreeDrive:各ジョイントは、ユーザーが適用した力の方向に移動します。
-
拘束モーション:ロボット端部は、力がランダムな方向から適用された場合でも、拘束された動作に設定された方向にのみ移動または回転します。
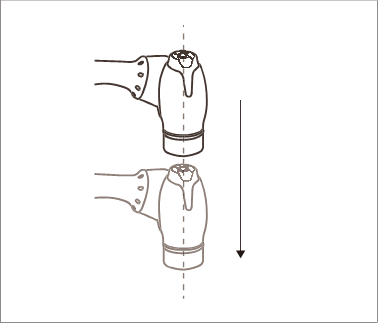
フリードライブ
ボタン1を押すと、FreeDriveモードがアクティブになり、ロボットを自由に移動できます。各ジョイントは、ユーザーが適用した力の方向に移動します。ボタンを離すと、ロボットを手で動かすことはできません。
-
ダイレクトティーチング中は、ロボットLEDがシアンで点滅します。
-
ティーチペンダントの背面にあるハンドガイドボタンを押すと、ボタン1を押すのと同じようにFreeDriveモードがアクティブになり、ロボットを自由に動かすことができます。
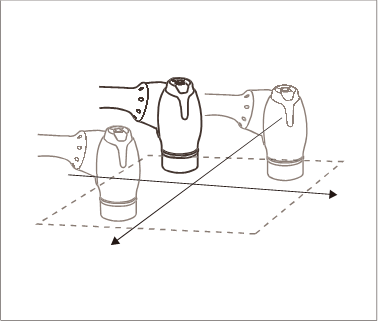
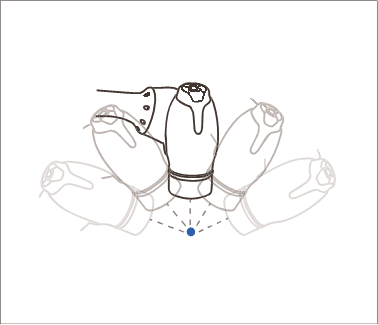
拘束モーション
ボタン2とボタン3を押すと、ランダムな方向から力が加えられた場合でも、ロボット端は拘束条件に一致する方向にのみ移動します。制約条件は、次の図の4つの条件のうちの2つで設定できます。Z軸拘束、平面固定拘束、サーフェス拘束、方向拘束
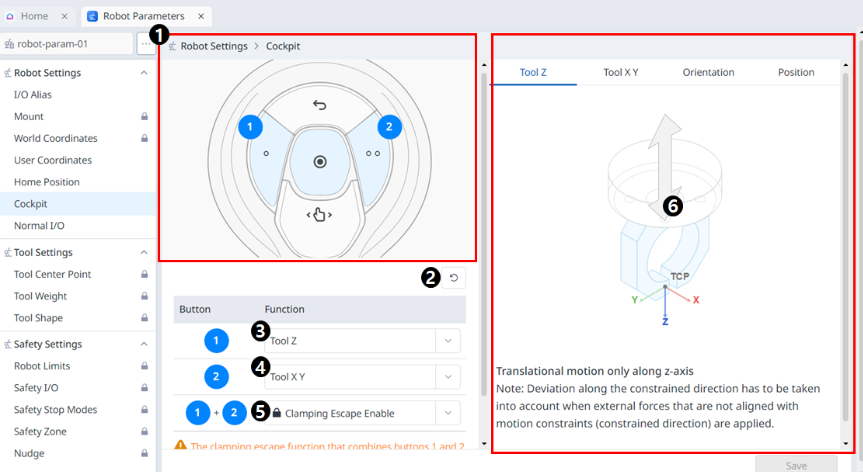
Cockpit buttons setting
メニュー
|
項目 |
説明 |
|
|---|---|---|
|
1 |
コックピットイメージ |
これはコックピット設定のイメージです。 |
|
2 |
リセット |
このボタンを使用すると、設定された値を初期化できます。 |
|
3 |
1ボタン設定 |
このセクションでは、ボタン1に設定する機能を選択できます。 |
|
4 |
2ボタン設定 |
このセクションでは、ボタン2に設定する機能を選択できます。 |
|
5 |
1+2ボタン設定 |
このセクションでは、ボタン1+2のクランプを有効にするかどうかを選択できます。 |
|
6 |
ガイド画像 |
コックピット設定項目のガイドイメージ |
コックピットボタンステータスの取得
ユーザーは、コックピットボタンが押されたか放されたかについての情報を取得できます。
ロボットはコックピットボタンを制御する機能を備えており、様々な用途で活用することができます。
-
通信APIの「モニタリングデータ」には、コックピットボタンに関する情報が表示されます。
-
ロボットのコックピットボタンを押すか、その逆を押すと、DRL APIを介してロボットを検出できます。
-
DRL API: get_cockpit_input (プログラミングマニュアルを参照してください。
-
パラメータ:(int)インデックス
-
戻り値: (int) 1: 押されています (ボタンが押されています)、 0:放す (ボタンは押されていません)
-