
Modulo Jog Plus
L'utente può selezionare un metodo di movimento manuale dalla scheda scatto.
- Jog: Sposta il giunto del robot o il TCP sull'asse del giunto o sull'asse delle coordinate selezionato dall'utente
- Sposta: Sposta il giunto del robot o il TCP sul punto target immesso dall'utente
Il movimento del robot è composto da due tipi.
- Movimento articolare: Sposta ogni giunto in modo lineare con un movimento rotatorio
- Movimento attività: Sposta l'estremità linearmente al punto target
Di seguito viene descritto il metodo per spostare il robot utilizzando il movimento articolare dalla schermata di avanzamento a scatti:
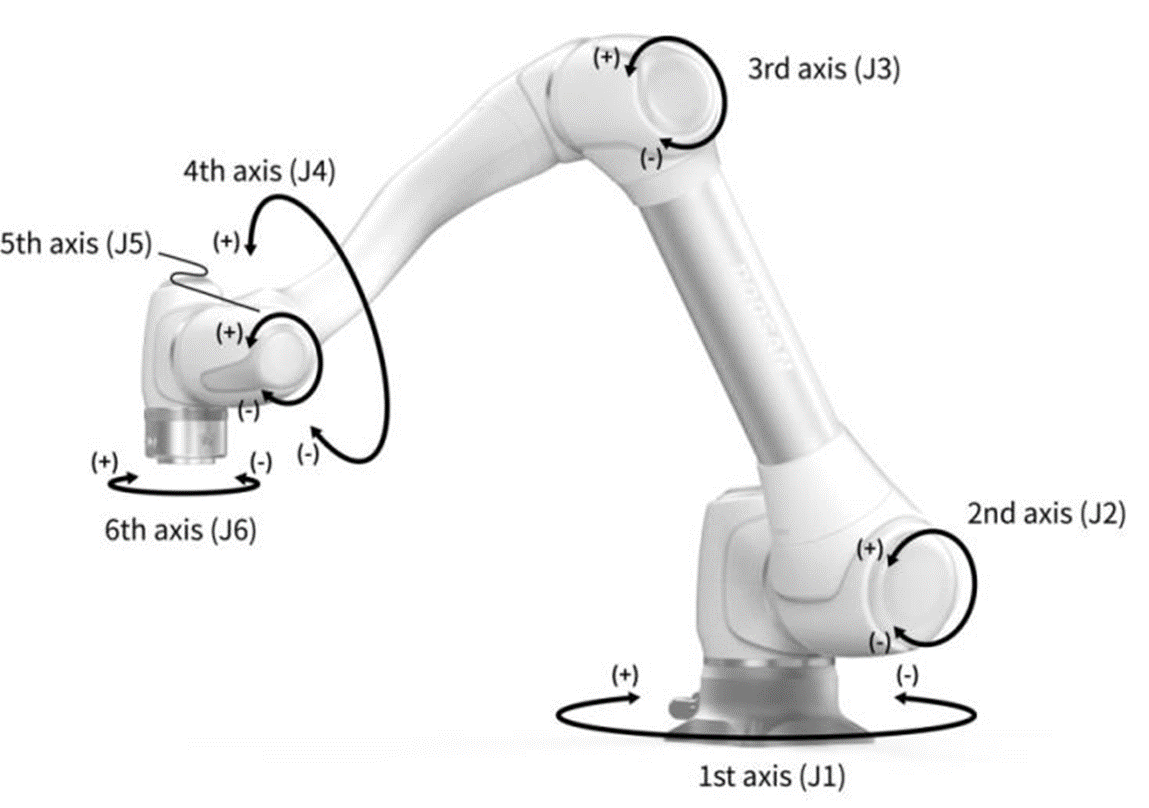
- Selezionare la scheda giunto.
- Selezionare l'asse da spostare. Ad esempio, è possibile selezionare J1.
- Premete il pulsante +/- per spostare il robot. Il robot si muove mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Di seguito viene descritto il metodo per spostare il robot utilizzando il movimento dell'attività nella schermata Jog:
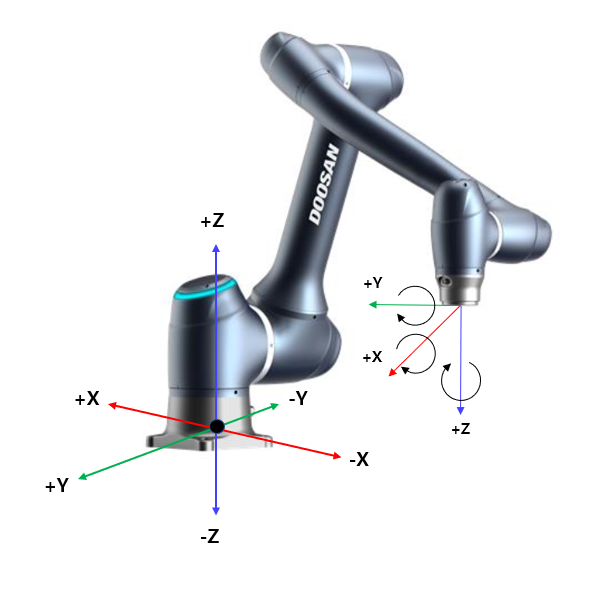
- Selezionare le coordinate base. Il robot può essere spostato in base alle coordinate BASE o UTENSILE.
- Selezionare la direzione da spostare. Ad esempio, è possibile selezionare l'asse X.
- Premete il pulsante +/- per spostare il robot. Il robot si muove mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Per ulteriori informazioni sullo spostamento a scatti, spostare e allineare, fare riferimento Schermata Jog (scatto) Sposta schermo rispettivamente a , e.
Nota
- Se l'interruttore a levetta della modalità effettiva nella parte superiore sinistra della schermata scatto è disattivato, il robot si sposta solo sulla schermata virtuale a sinistra della schermata scatto. Il robot effettivo si muove se l'interruttore a levetta della modalità effettiva è attivato.
Con il modulo Jog Plus, l'utente può esplorare l'intero spazio di lavoro in modalità manuale o impostare lo spazio operativo come spazio operativo del robot. L'angolo di movimento di ciascun asse può essere limitato in base allo spazio operativo selezionato e al limite dell'angolo del giunto dell'impostazione di sicurezza.
Per utilizzare la funzione Jog Plus, toccare il modulo Jog Plus nel menu principale.
- La funzione di scatto non può essere utilizzata quando il servomeccanismo è disattivato.
- Il robot viene azionato manualmente nella schermata Jog Plus, quindi si muove solo quando viene premuto il pulsante Jog.
- È possibile spostare il robot in base alla posizione corrente nella schermata Jog Plus Tab.
- Il robot può essere spostato configurando l'angolo/le coordinate target nella schermata della scheda Move (Sposta) .
- È possibile configurare le coordinate di riferimento nella schermata Jog Plus Tab (scheda Jog Plus) e nella schermata Move Tab(scheda Sposta) come un giunto o un'attività .
Nota
- Se il robot non può essere navigato perché si trova in uno spazio diverso dallo spazio operativo della modalità Jog Plus, impostare lo spazio operativo del robot su "nessuno"per consentire la navigazione del robot.
Nota
Questo modulo non è disponibile in modalità auto. Toccando il pulsante di commutazione in basso a destra, è disponibile la modalità Manuale.
L'utilizzo di Job Plus (Jog+) consente di utilizzare la funzione di scatto contemporaneamente durante l'esecuzione di lavori diversi. Questa funzione può essere utilizzata quando è necessario il controllo manuale per spostare il robot sul punto target durante l'apprendimento.
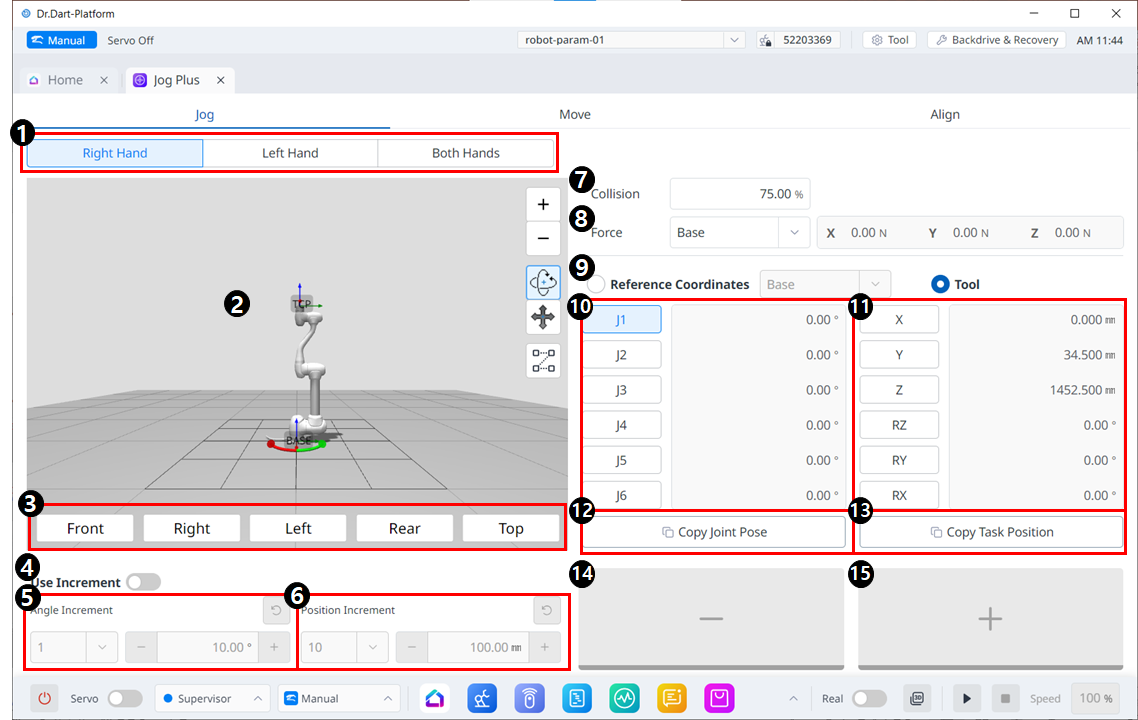
Layout del menu jog
| Elemento | Descrizione | |
|---|---|---|
| 1 | Seleziona il tipo di pannello | Puoi scegliere la posizione del pulsante di spostamento. |
| 2 | Simulazione 3D | Questo è il visualizzatore 3D, dove puoi vedere come appare il robot. |
| 3 | Allineamento del simulatore | È possibile utilizzare questa sezione per guidare il simulatore. |
| 4 | Usa Incremento | Questo pulsante consente di abilitare gli incrementi di angolo o posizione. |
| 5 | Incremento dell'angolo | In questa sezione viene impostato l'incremento dell'angolo sull'asse selezionato. |
| 6 | Incremento di posizione | In questa sezione viene impostato l'incremento di posizione sull'asse selezionato. |
| 7 | Collisione | In questo campo si imposta la collisione del robot. |
| 8 | Monitoraggio della forza | In questa sezione è possibile impostare le forze negli assi X, Y e Z in base a Base, Strumento, Mondo, Riferimento e tra gli altri. |
| 9 | Seleziona il sistema di coordinate di riferimento | Selezionare un sistema di coordinate di riferimento per visualizzare o spostare le coordinate dell'attività nella Figura 11. Può essere le coordinate Base, Mondiale o Utente. |
| 10 | Pannello congiunto | È possibile selezionare l'asse del giunto da spostare. |
| 11 | pannello delle attività | È possibile selezionare l'asse dell'attività da spostare. |
| 12 | Pulsante Copia posa J | Questo pulsante ti consente di copiare la Posa J. |
| 13 | Pulsante Copia posa X | Questo pulsante ti consente di copiare la Posa X. |
| 14 | Sposta - Pulsante | È possibile far muovere il robot nella direzione - in base a ciascun asse. A questo punto, puoi capire la direzione di - e + nella simulazione 3D sul lato sinistro. |
| 15 | Sposta + pulsante | Puoi far muovere il robot nella direzione + in base a ciascun asse. A questo punto, puoi capire la direzione di - e + nella simulazione 3D sul lato sinistro. |
Spostatevi
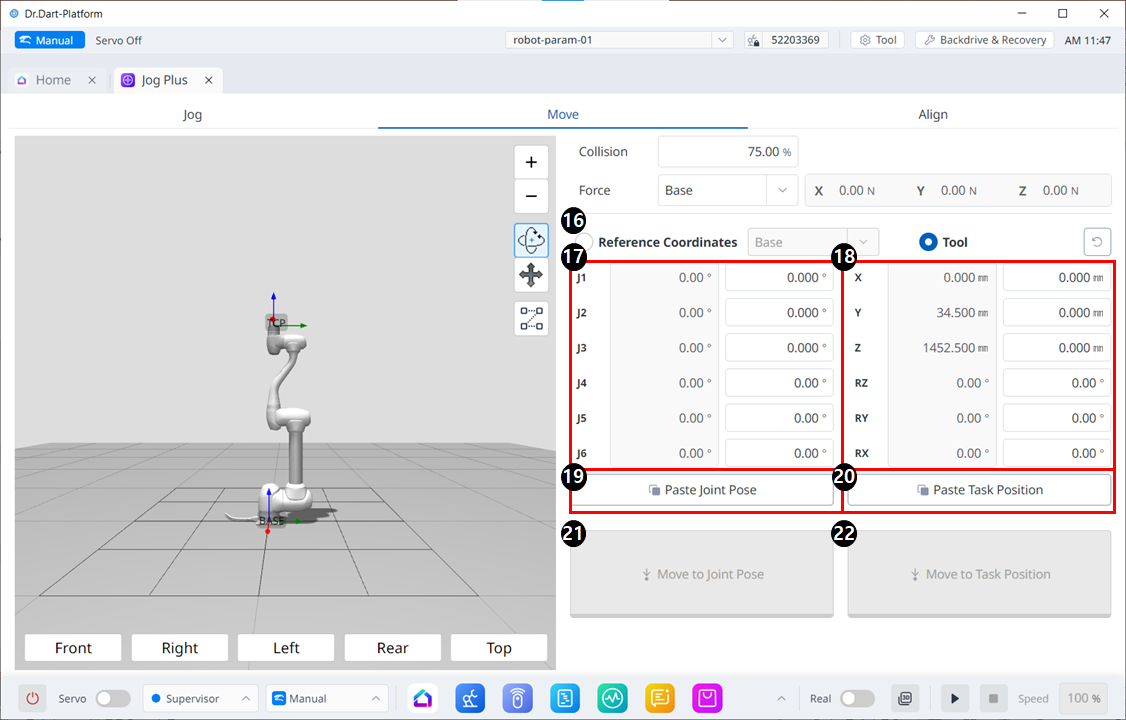
Move Menu Layout
| Elemento | Descrizione | |
|---|---|---|
| 16 | Coordinate di riferimento | Selezionare il sistema di coordinate di riferimento da utilizzare per le coordinate dell'attività nella Figura 18. È possibile scegliere le coordinate Base, Mondiale o Utente. |
| 17 | Postura congiunta | Visualizza la postura attuale del robot e la postura dell'articolazione target. |
| 18 | Postura del compito | Visualizza la postura corrente del robot e la postura dell'attività target che si adatta al sistema di coordinate di riferimento selezionato. |
| 19 | Incolla la postura articolare | Incolla il valore della postura copiato negli appunti nel pannello della postura articolare. |
| 20 | Incolla la postura dell'attività | Incolla il valore della postura copiato negli appunti nel pannello della postura dell'attività. |
| 21 | Pulsante Movimento congiunto | Questo pulsante fa sì che il robot si sposti nella postura dell'articolazione target. |
| 22 | Pulsante spostamento attività | Questo pulsante fa sì che il robot si sposti nella postura dell'attività target. |