
Sposta schermo
Move Menu Layout
| Elemento | Descrizione | |
|---|---|---|
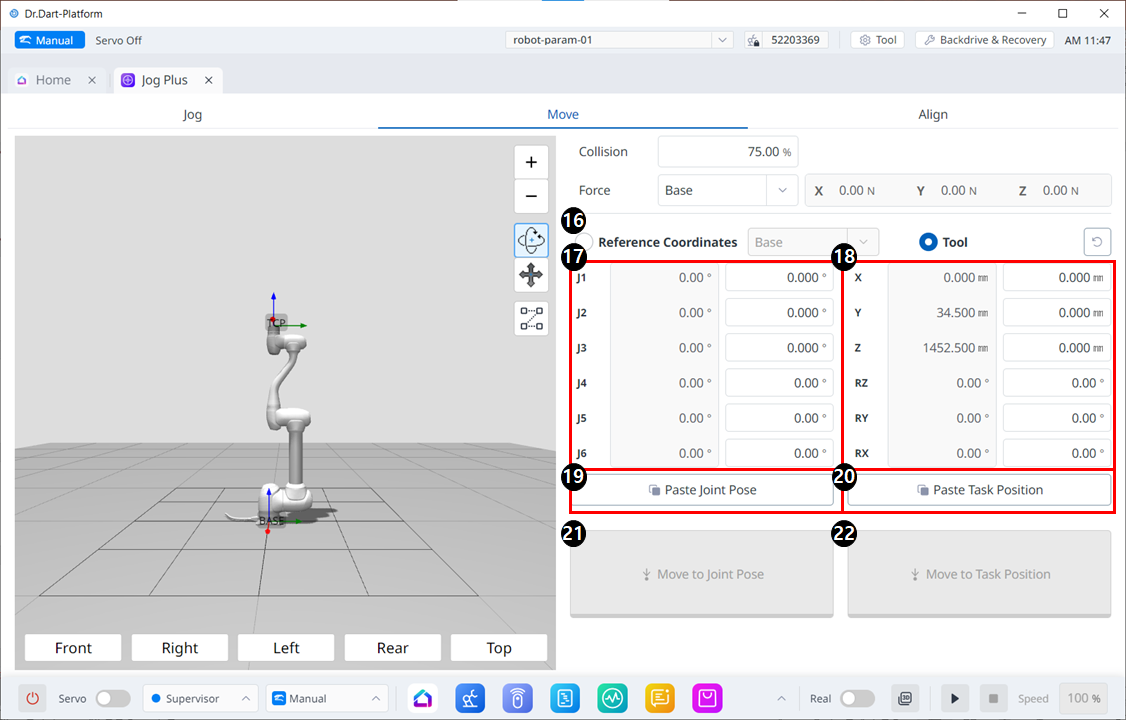
| 16 | Coordinate di riferimento | Selezionare il sistema di coordinate di riferimento da utilizzare per le coordinate dell'attività nella Figura 18. È possibile scegliere le coordinate Base, Mondiale o Utente. |
| 17 | Postura congiunta | Visualizza la postura attuale del robot e la postura dell'articolazione target. |
| 18 | Postura del compito | Visualizza la postura corrente del robot e la postura dell'attività target che si adatta al sistema di coordinate di riferimento selezionato. |
| 19 | Incolla la postura articolare | Incolla il valore della postura copiato negli appunti nel pannello della postura articolare. |
| 20 | Incolla la postura dell'attività | Incolla il valore della postura copiato negli appunti nel pannello della postura dell'attività. |
| 21 | Pulsante Movimento congiunto | Questo pulsante fa sì che il robot si sposti nella postura dell'articolazione target. |
| 22 | Pulsante spostamento attività | Questo pulsante fa sì che il robot si sposti nella postura dell'attività target. |