
Funzionamento manuale - imparare a usare lo sfalsamento
OBBLIGATORIO NORMALE 15 MIN
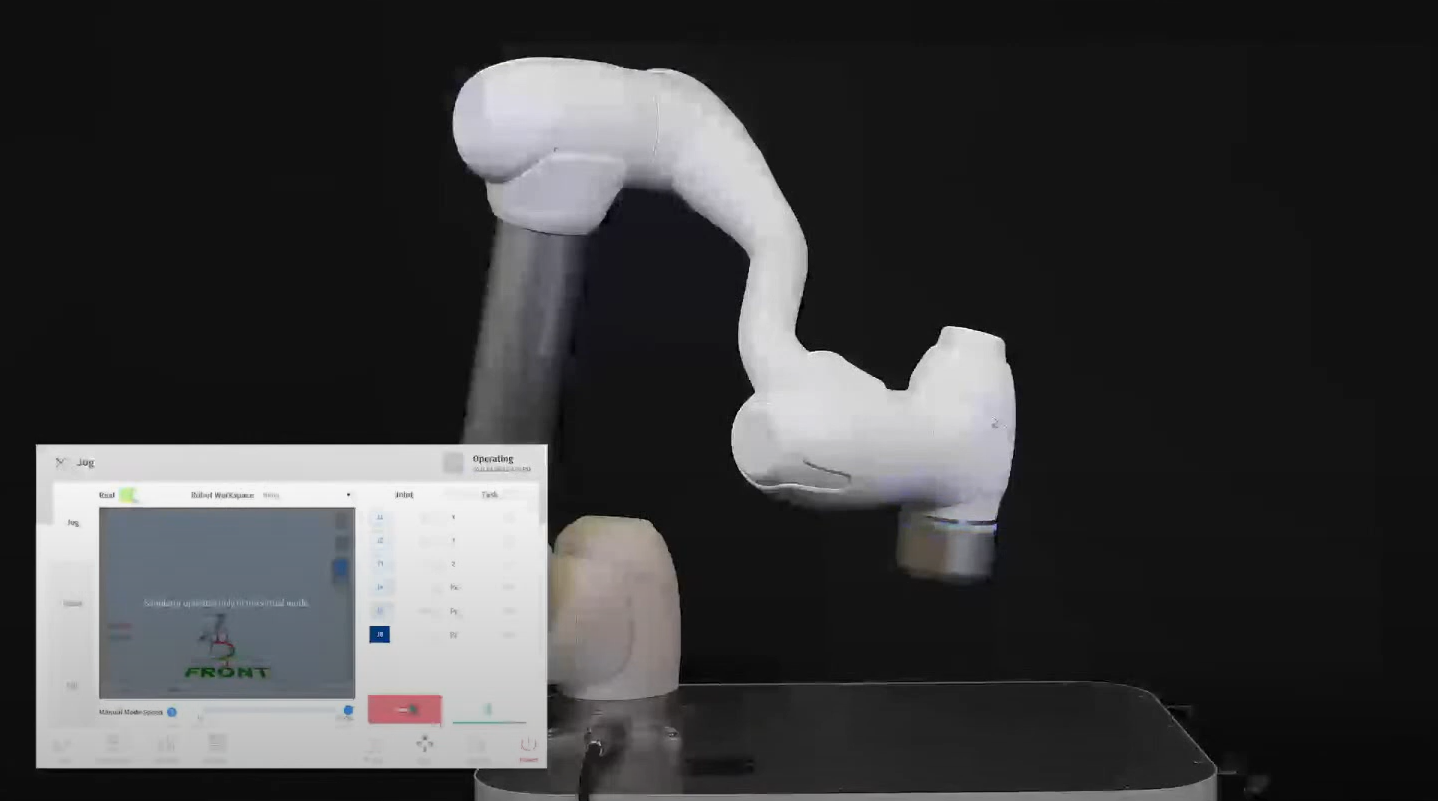
L'utente può selezionare un metodo di movimento manuale dalla scheda scatto. Per ulteriori informazioni sullo sfalsamento/spostamento/allineamento, fare riferimento alla Funzione Jog.
- Sfalsamento: Sposta il giunto del robot o il TCP sull'asse del giunto o sull'asse delle coordinate selezionato dall'utente
- Sposta: Sposta il giunto del robot o il TCP sul punto target immesso dall'utente
- Allinea: Sposta l'estremità del robot sul piano perpendicolare al piano selezionato dall'utente e all'asse delle coordinate parallelo all'estremità del robot
Il movimento del robot è composto da due tipi.
- Movimento articolare: Sposta ciascun giunto in modo lineare con un movimento di rotazione
- Movimento attività: Sposta l'estremità in modo lineare sul punto target
Di seguito è riportato il metodo per spostare il robot utilizzando il movimento articolare dalla schermata di sfalsamento:
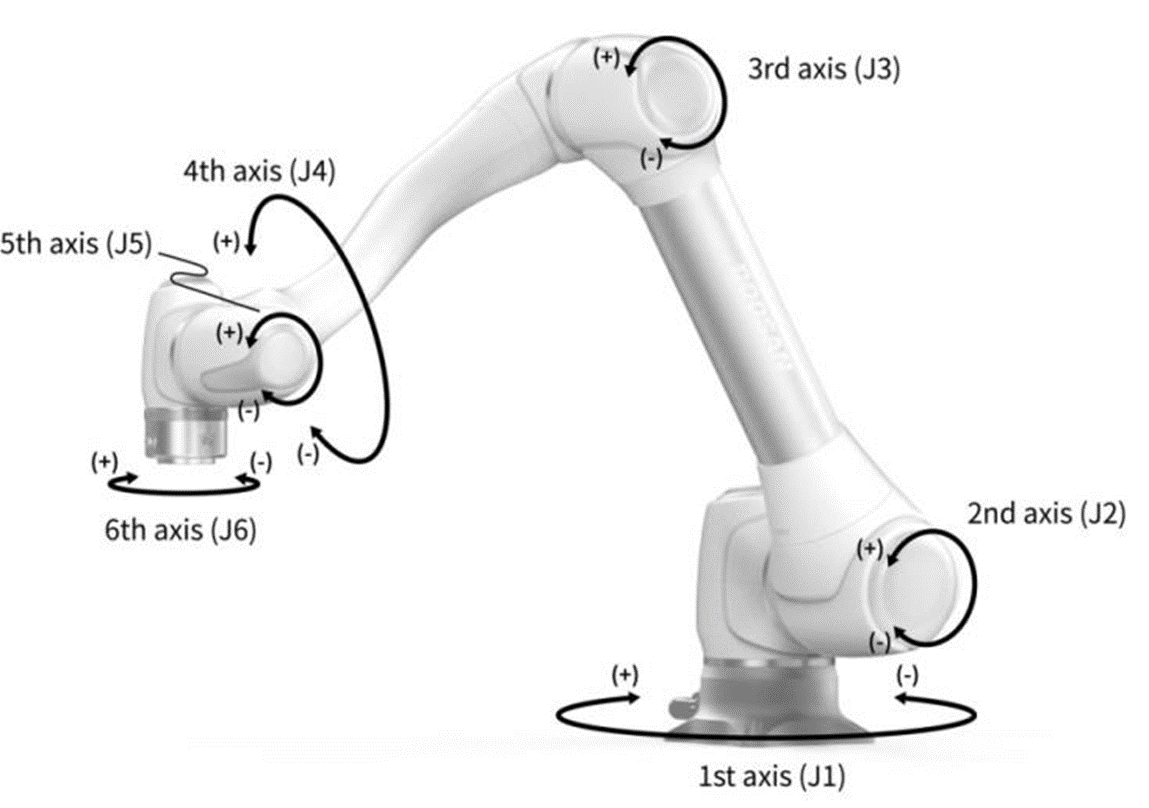
- Selezionare la scheda giunto.
- Selezionare l'asse da spostare. Ad esempio, è possibile selezionare J1.
- Premere il pulsante +/- per spostare il robot. Il robot si sposta mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Di seguito è riportato il metodo per spostare il robot utilizzando il movimento dell'attività sulla schermata di sfalsamento:
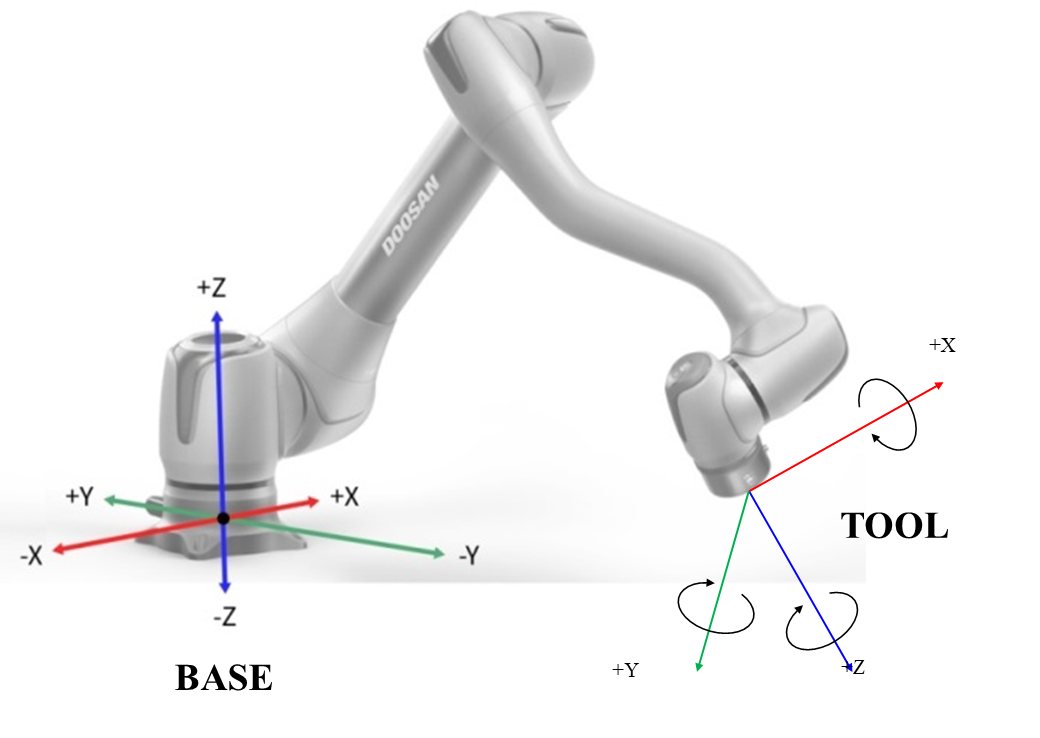
- Selezionare le coordinate di base. Il robot può essere spostato in base alle coordinate DI BASE o ALLE coordinate UTENSILE.
- Selezionare la direzione da spostare. Ad esempio, è possibile selezionare l'asse X.
- Premere il pulsante +/- per spostare il robot. Il robot si sposta mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Per ulteriori informazioni sul movimento di sfalsamento, lo spostamento e l'allineamento, fare riferimento rispettivamente a Schermata Jog, Schermata Movement (Movimento) e Schermata Align (Allineare) .
Nota
- Se l'interruttore a levetta della modalità effettiva in alto a sinistra della schermata di scatto è disattivato, il robot si sposta solo sulla schermata virtuale a sinistra della schermata di scatto. Il robot effettivo si sposta se l'interruttore a bilanciere della modalità effettiva è attivato.