
Schermata Movement (Movimento)
Il robot può essere spostato in base all'angolo/le coordinate target nella schermata della scheda Move (Muovi). Se le coordinate su cui deve muoversi il robot sono note o se il robot deve essere spostato verso l'alto con coordinate espresse in decimali, è possibile spostare il robot inserendo le coordinate.
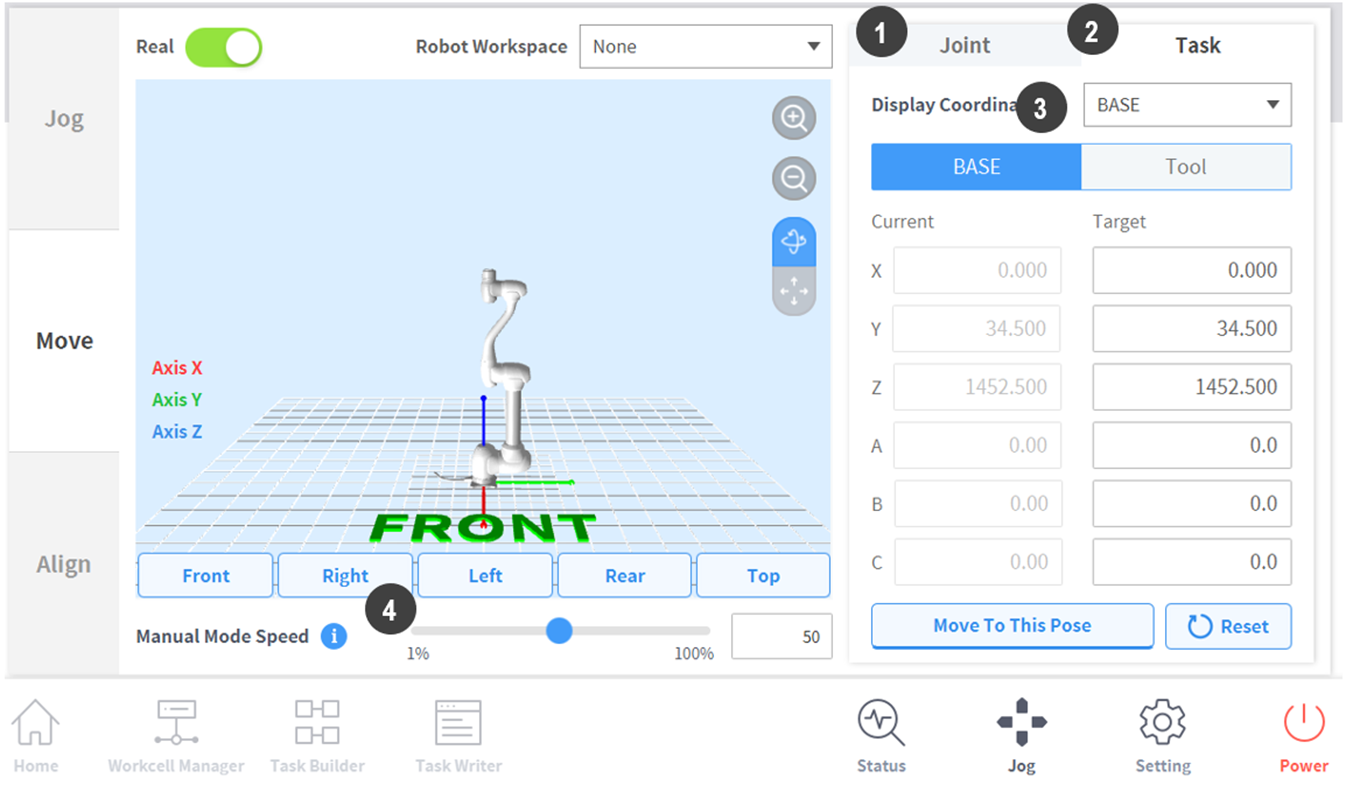
N. | Voce | Descrizione |
|---|---|---|
1 | Joint | Configura la coordinata di riferimento da utilizzare durante il movimento a impulsi (jog) del robot. |
2 | Task | Configura l'angolo di riferimento da utilizzare durante il movimento a impulsi (jog) del robot. |
3 | Reference Point Setting | Imposta il punto di riferimento per l'allineamento alle coordinate dell'attività. Base (Base): Imposta le coordinate dell'attività in base alla base del robot. World (Mondo): Imposta le coordinate attività in base alle Coordinate Mondo impostate. Tool (Utensile): Configura le coordinate dell'attività in base all'utensile montato all'estremità del robot a sei assi. |
4 | Manual Mode Speed | Configura la velocità di movimento del robot in modalità manuale. La velocità può essere regolata trascinando il cursore. Se il cursore è al 100%, la massima velocità del giunto corrisponde sulla scheda Move è 30 gradi/s, e la massima velocità dell'attività è 250 mm/s. La velocità influenza la velocità controllata dai pulsanti jog e di movimento. |