
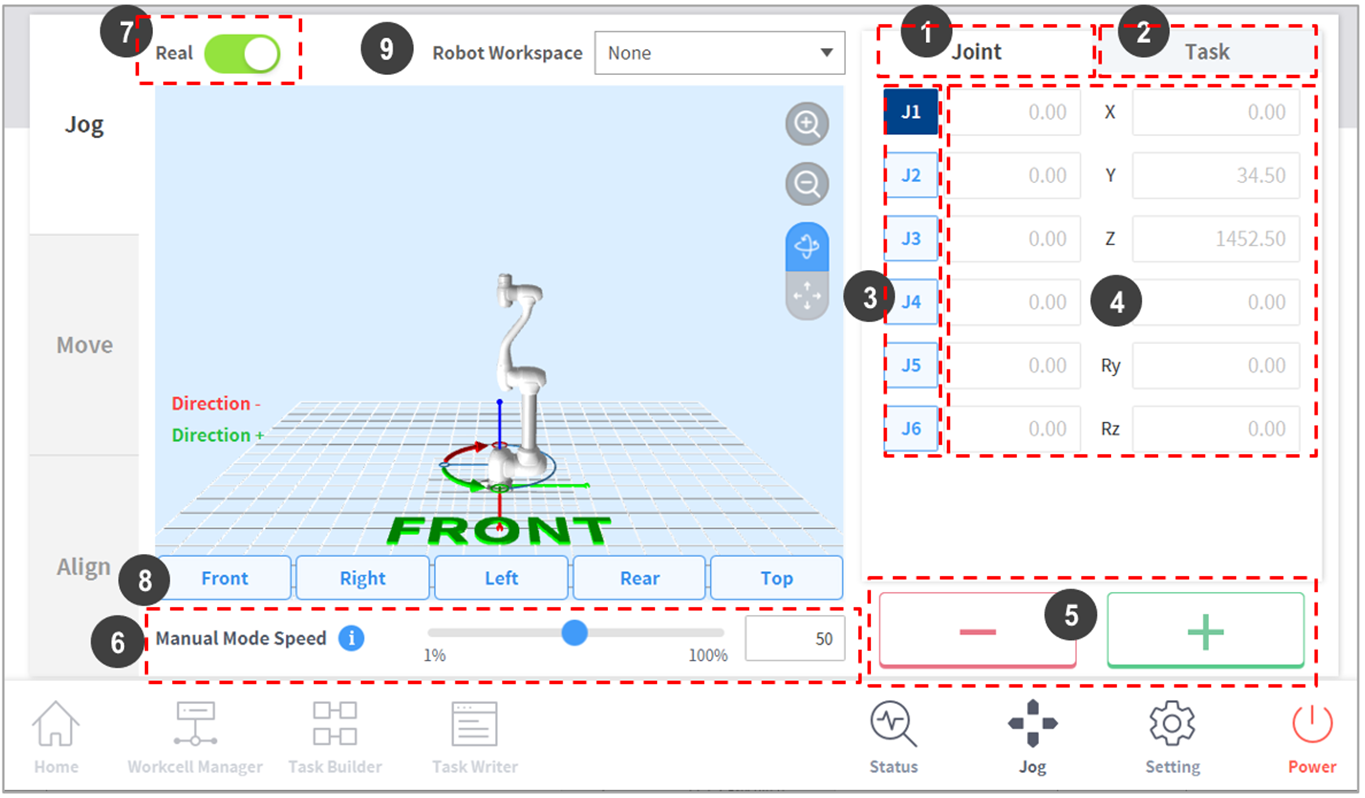
Schermata Jog
È possibile navigare in base alla posizione corrente del robot nella schermata jog (Movimento a impulsi).
N. | Voce | Descrizione |
|---|---|---|
1 | Joint | Configura un giunto come coordinata di riferimento per la modalità jog. |
2 | Task | Configura l'attività come coordinata di riferimento per la modalità jog. |
3 | Select Axis | Seleziona un asse per il movimento in modalità jog.
|
4 | Coordinate Display | Visualizza le coordinate del robot attualmente in funzione in modalità Jog. Se la posizione del robot cambia premendo il pulsante di direzione, anche la coordinata si modifica. |
5 | Direction | Muove il robot nella direzione + o - dell'asse selezionato. |
6 | Manual Mode Speed | Configura la velocità di movimento del robot in modalità manuale. La velocità può essere regolata trascinando il cursore. Se il cursore è al 100%, la massima velocità del giunto corrisponde sulla scheda Jog è 30 gradi/s e la massima velocità dell'attività è 250 mm/s. Questa velocità influenza la velocità controllata dai pulsanti jog e di movimento. |
7 | Real Mode | Configura il funzionamento del robot in modalità reale quando in modalità jog.
|
8 | Simulator Alignment | Seleziona la direzione di allineamento visualizzata sul simulatore. Toccando un pulsante di direzione si allinea il robot di conseguenza. |
9 | Robot Workspace | Visualizza i dati relativi allo spazio di lavoro del robot registrati nel Workcell Manager sul Simulatore Jog. Premere il Menu a tendina per selezionare lo spazio di lavoro da visualizzare. |


Nota
- Limite di velocità TCP: La massima velocità operativa durante il funzionamento a impulsi (jog) e il movimento è limitata a 250 mm/s in conformità delle norme di sicurezza.
- Se il robot si arresta a causa del raggiungimento del limite del giunto o se viene rilevata una collisione durante il movimento del robot in modalità jog, impostare la modalità di ripristino sicurezza e spostare il robot posizionandolo entro il limite dell'angolo del giunto. Per maggiori informazioni sulla modalità di ripristino sicurezza, vedere “ Modalità di ripristino sicurezza”