Modalità di ripristino del software
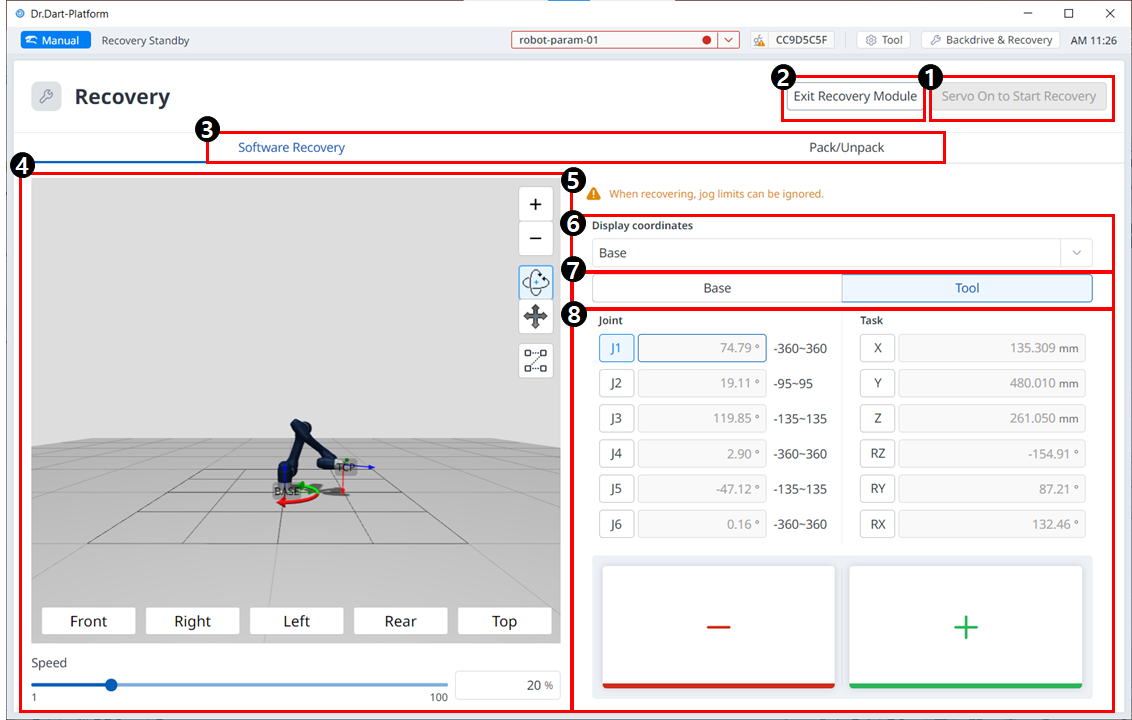
Voci di menu
|
|
Elemento |
Descrizione |
|---|---|---|
|
1 |
Servo ON per avviare il ripristino |
Questo pulsante consente di attivare il servocomando prima di entrare in modalità di ripristino. |
|
2 |
Uscire da Recovery |
Questo pulsante consente di uscire dal modulo di ripristino. |
|
3 |
Intestazione |
Questa sezione consente di selezionare la modalità di ripristino software o la modalità di compressione/disimballaggio. |
|
4 |
Simulazione 3D. |
Quest'area consente di visualizzare in anteprima una simulazione 3D dei valori impostati. |
|
5 |
Messaggio di avvertimento |
Questo spiega le precauzioni. |
|
6 |
Visualizza coordinate |
Qui è possibile impostare le coordinate in base alla base o al mondo. |
|
7 |
Pulsante base/strumento |
Qui è possibile impostare il valore in base alla base o allo strumento. |
|
8 |
Joint/Task |
Questa sezione consente di immettere i valori desiderati per far muovere il robot. |
Per utilizzare la modalità di ripristino del software, attenersi alla seguente procedura:
-
Toccare il menu Ripristino nella finestra Menu principale. La schermata Ripristino software viene visualizzata automaticamente nella finestra Ripristino.
-
Toccare ciascun pulsante giunto sul lato destro della schermata di ripristino software e utilizzare
-
Per le definizioni dei pulsanti del cockpit, vedere Cockpit
-
Le modifiche apportate all'impostazione vengono riflesse nella finestra di simulazione a sinistra in tempo reale.
-
-
Al termine dell'impostazione, toccare il pulsante X in alto a sinistra per chiudere la finestra.
La modalità di riparazione software non è disponibile quando il limite dell'angolo del giunto viene superato di 3 gradi.