Per spostare il robot a un'angolazione specifica, attenersi alla seguente procedura:
-
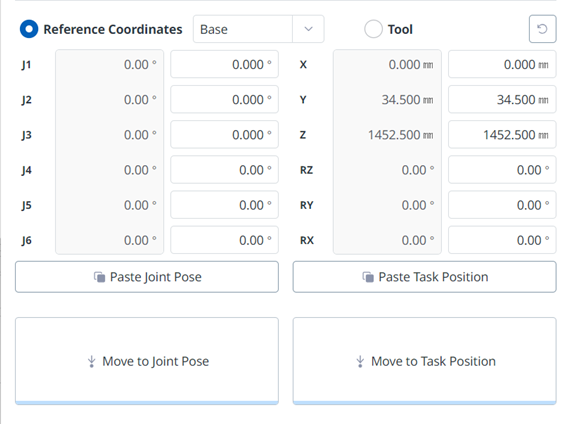
Seleziona la scheda Sposta
-
Immettere l'angolo target del giunto del robot.
-
Attivare la modalità reale.
-
Tenere premuto il pulsante Sposta sulla posa corrispondente per regolare l'angolo del giunto del robot.