Questa funzione inserisce/emette segnali relativi alla sicurezza attraverso un terminale ridondante. Se viene rilevato un segnale diverso dal segnale di input o output di sicurezza ridondante, il sistema determina se si tratta di un cortocircuito o di un difetto hardware e arresta il robot con la modalità sto Stop.
-
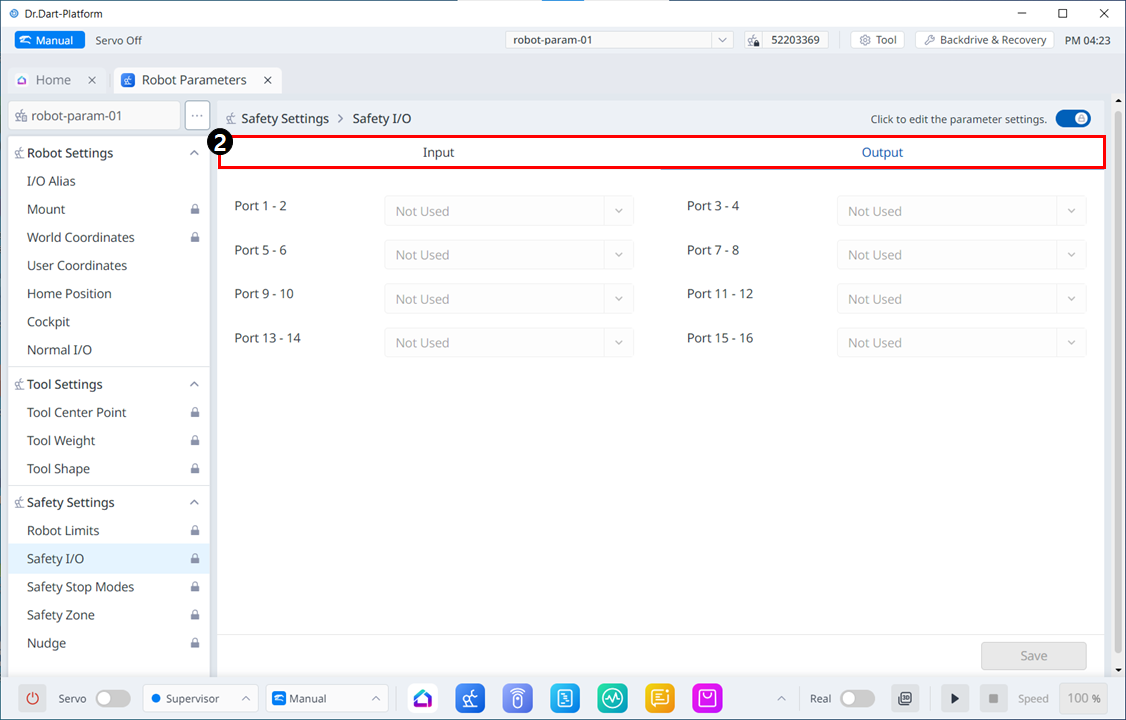
I/o del segnale di sicurezza) può essere impostato in parametri robot > Impostazioni di sicurezza > i/o di sicurezza.
Per ulteriori informazioni, vedere I/o segnale di sicurezza .
Voci di menu
|
|
Elemento |
Descrizione |
|---|---|---|
|
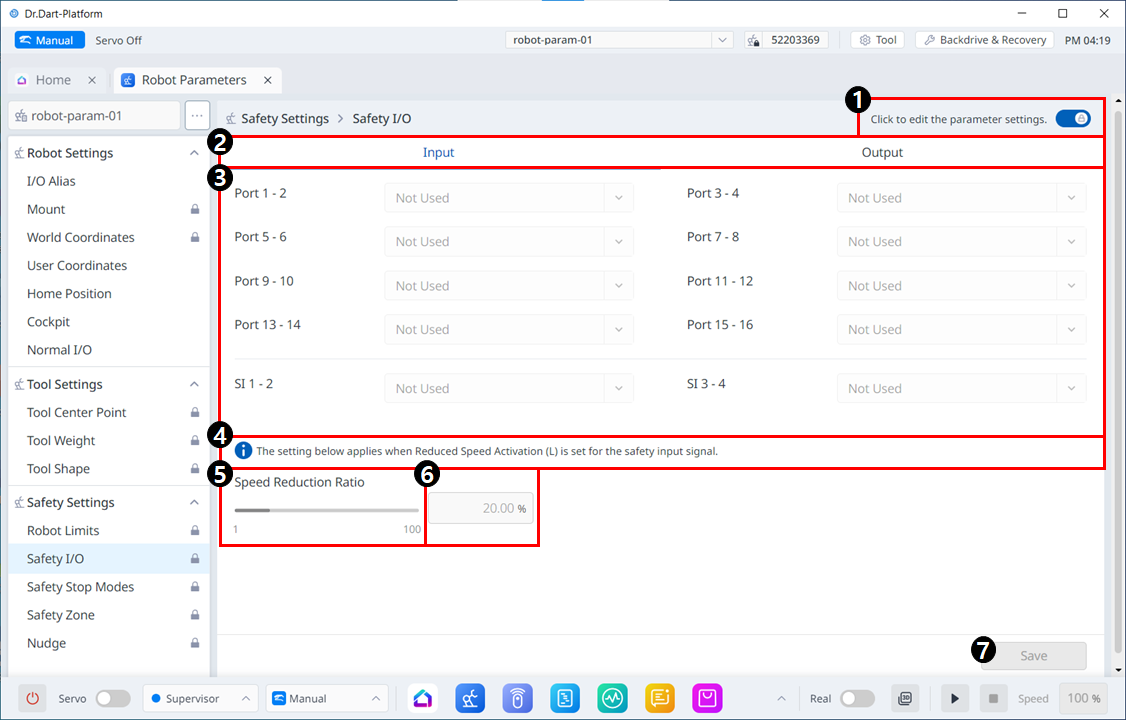
1 |
Pulsante di attivazione/disattivazione blocco |
Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
|
2 |
Ingresso/uscita |
È possibile selezionare input/Output (ingresso/uscita) per l'impostazione. |
|
3 |
Elenco delle porte |
Questo è un elenco di porte nella categoria corrispondente. I menu a discesa includono:
|
|
4 |
Messaggio di attenzione |
Nota di attenzione per l'impostazione di Safety i/O. |
|
5 |
Cursore velocità di riduzione velocità |
È possibile utilizzare il cursore per impostare il rapporto di riduzione della velocità. |
|
6 |
Ingresso velocità di riduzione velocità |
Il tasso di riduzione della velocità può essere immesso direttamente. Può essere impostato da 0 a 100%. |
|
7 |
Salva |
Questo pulsante consente di salvare l'impostazione immessa. |
La schermata Output (uscita) viene visualizzata come segue, in modo simile a input (ingresso).