Per spostare il robot in base alle coordinate utensile, attenersi alla seguente procedura:
-
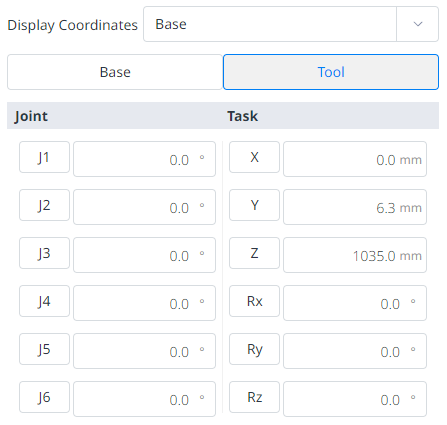
Selezionare la scheda Sposta e selezionare la scheda attività.
-
Selezionare la scheda strumento.
-
Configurare la posa da spostare con riferimento allo strumento.
-
Toccare e tenere premuto il pulsante Sposta sulla posa corrispondente per passare alle coordinate impostate.