Obbligatorio NORMALE 15 min
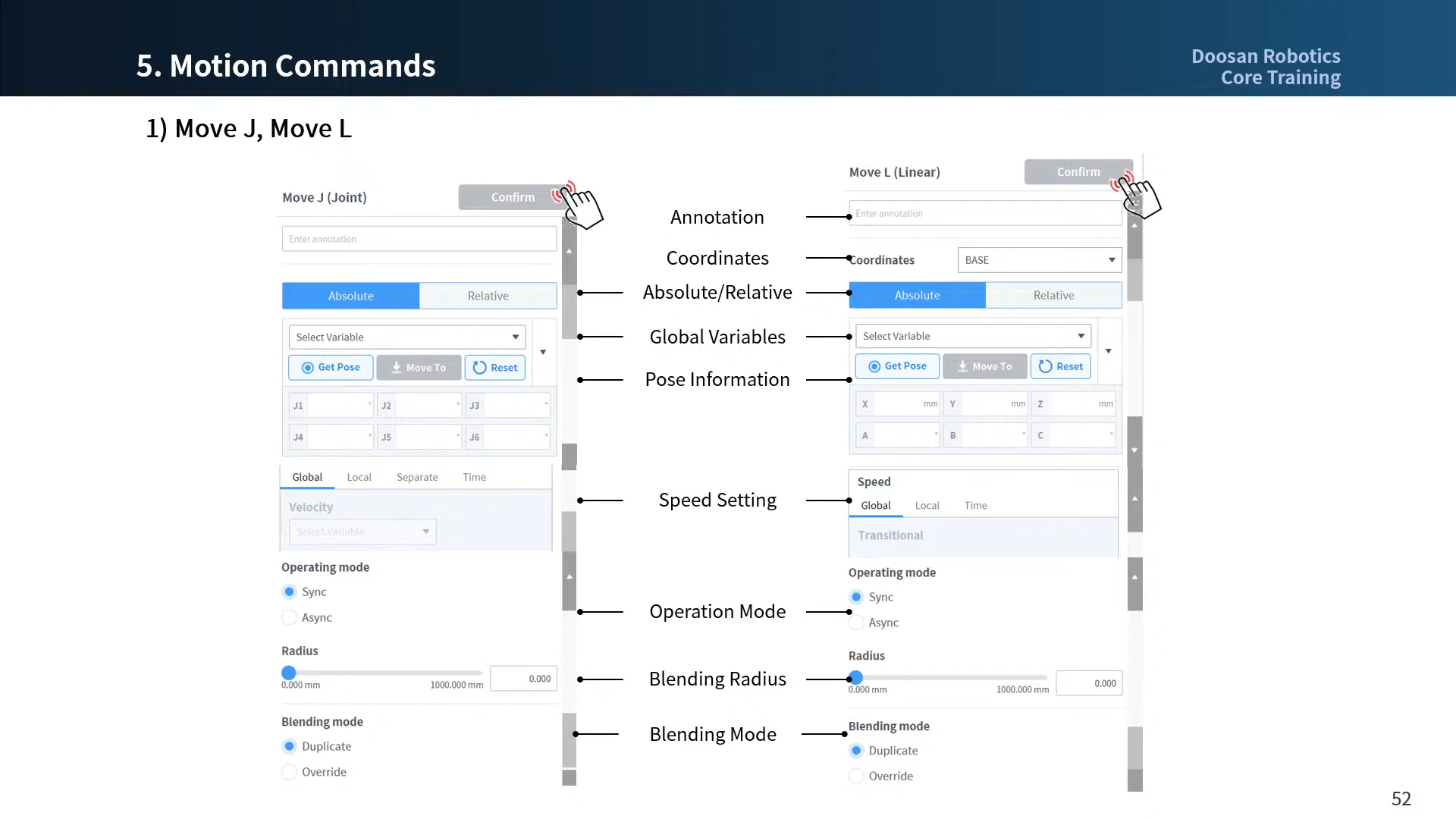
È la schermata delle proprietà dei comandi MoveJ e MoveL standard. Anche altri movimenti hanno proprietà simili.
-
Se il movimento viene creato con le impostazioni minime, è necessario immettere solo le informazioni sulla posa (5 nella figura seguente).

|
|
Nome |
Descrizione |
|---|---|---|
|
1 |
Annotazione |
Descrizione o annotazione del comando che si trova nella finestra di attività |
|
2 |
Coordinate |
|
|
3 |
Selezionare Sposta tipo |
|
|
4 |
Selezionare variabile |
È possibile selezionare le informazioni di posa registrate come variabili |
|
5 |
Informazioni sulla posa |
Vengono immesse le informazioni di posa
|
|
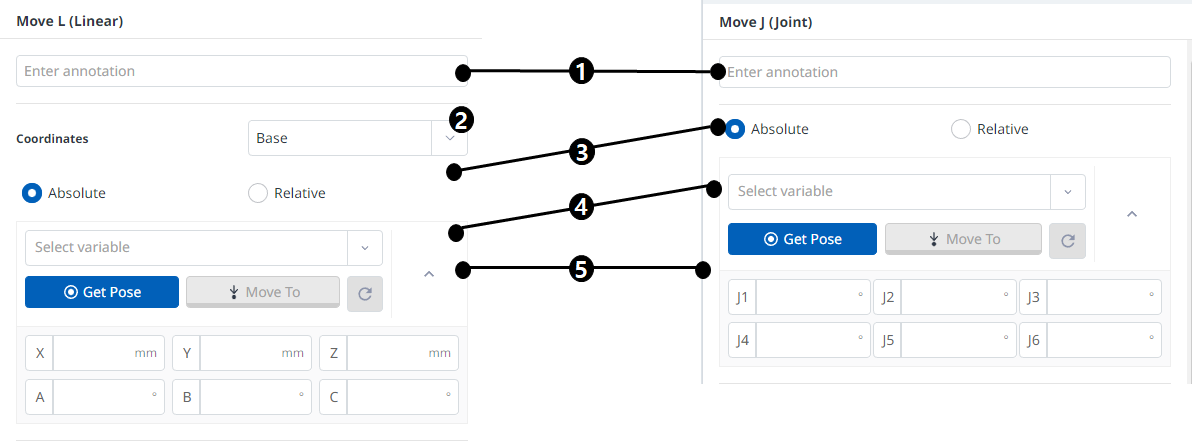
6 |
Impostazione della velocità |
|
|
7 |
Modalità operativa |
|
|
8 |
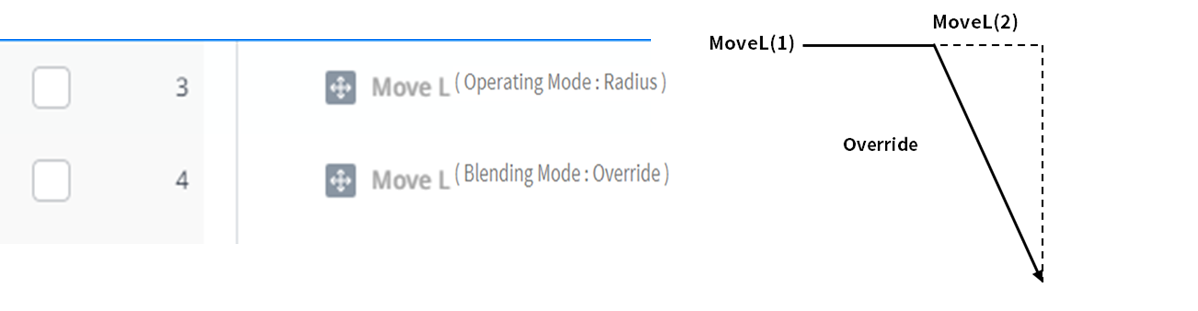
Modalità di fusione |
L'opzione usata per determinare se ignorare o sovrascrivere il movimento precedente in base al metodo di fusione del movimento successivo quando il raggio è impostato come opzione del movimento precedente |
Modalità operativa
Sincronizza
È possibile passare al comando successivo con Sync (Sincronizza) quando il comando in corso è completato. È impostato come predefinito e utilizzato in situazioni generali.
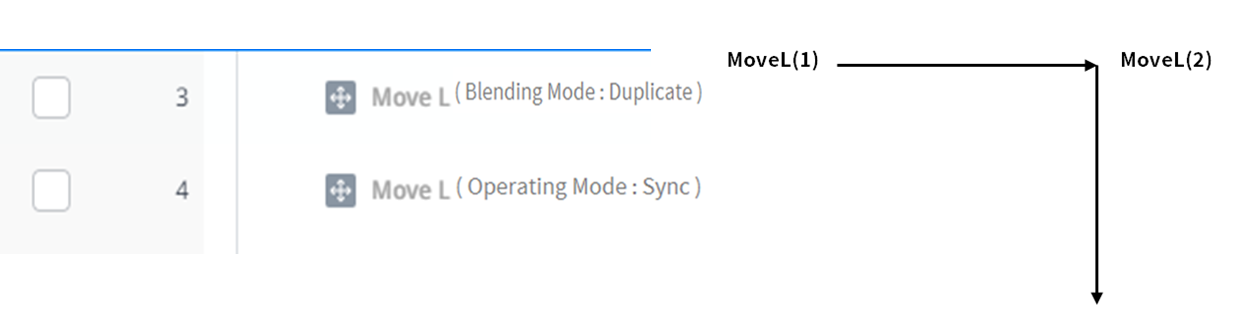
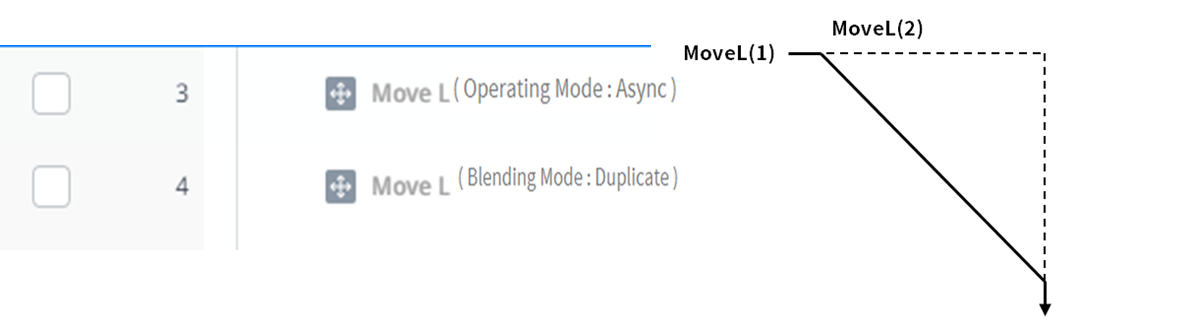
Asincr
Async avvia il comando successivo contemporaneamente all'inizio del comando di movimento. Viene utilizzato per collegare agevolmente movimenti diversi e viene utilizzato anche quando l'uscita del segnale viene attivata/disattivata contemporaneamente all'inizio del movimento.
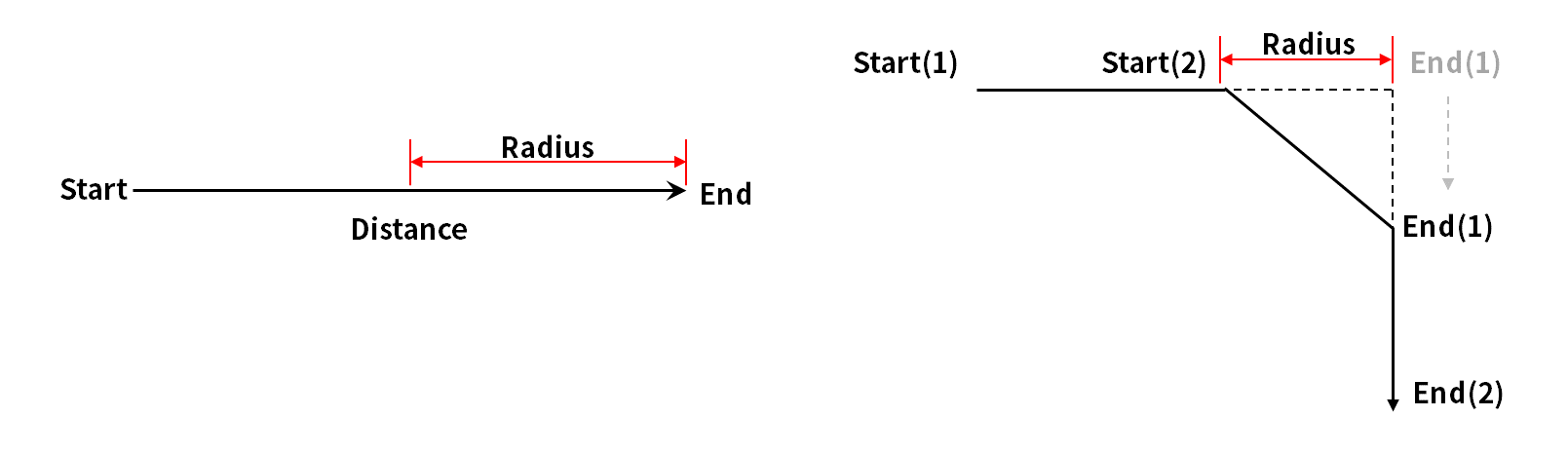
Raggio
L'opzione raggio attiva la funzione asincrona nella sezione raggio prima che il comando di movimento raggiunga il punto di destinazione. Con questa opzione, è possibile connettersi senza problemi al comando di movimento successivo senza interrompere il comando di movimento corrente. Il raggio è impostato su 0 mm come impostazione predefinita.
L'opzione RADIUS presenta le seguenti caratteristiche e limiti:
-
La funzione RADIUS può essere utilizzata solo in modalità di sincronizzazione.
-
Le condizioni e i calcoli possono essere eseguiti nella sezione asincrona all'interno del raggio.
-
Il raggio non può superare 1/2 della distanza totale tra la posizione corrente e quella target prima dell'esecuzione del movimento.es. Se la distanza di movimento è di 100 mm, il raggio massimo disponibile è di 50 mm.
-
I comandi di movimento che non possono applicare la fusione tra i movimenti sono i seguenti: La fusione è già applicata in questi comandi, quindi l'applicazione di RADIUS a questi comandi e l'esecuzione di questi ultimi provoca errori. L'utilizzo di comandi, come WaitMotion e StopMotion, può aiutare a evitare errori. MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
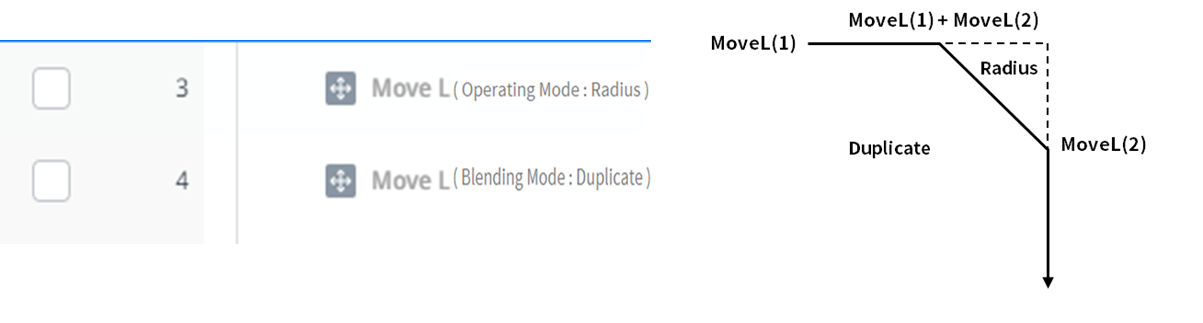
Modalità di fusione
È l'opzione utilizzata per determinare se ignorare o sovrascrivere il movimento precedente in base al metodo di fusione del movimento successivo quando il raggio è impostato come opzione del movimento precedente.
Duplica
Duplica è una modalità che mantiene il movimento precedente per consentire al movimento successivo di sovrapporsi al movimento precedente.
Ignora
L'esclusione ignora e sovrascrive il movimento precedente per eseguire il movimento seguente.