
Jog Plus modul
A felhasználó kiválaszthatja a kézi mozgatási módot a Jog (Jóg) fülön.
- Jog: A robot illesztését vagy a TCP-t a felhasználó által kiválasztott közös tengelyre vagy koordináta-tengelyre mozgatja
- Mozgatás: A robot illesztését vagy TCP-t a felhasználó által megadott célpontra mozgatja
A robot mozgása két típusból áll.
- Közös indítvány: Minden ízületet lineárisan mozog forgó mozgással
- Feladat mozgás: A végpontot lineárisan mozgatja a célponthoz
A következő módszer a robot mozgatásának módja a joint Motion segítségével a léptetőképernyőről:
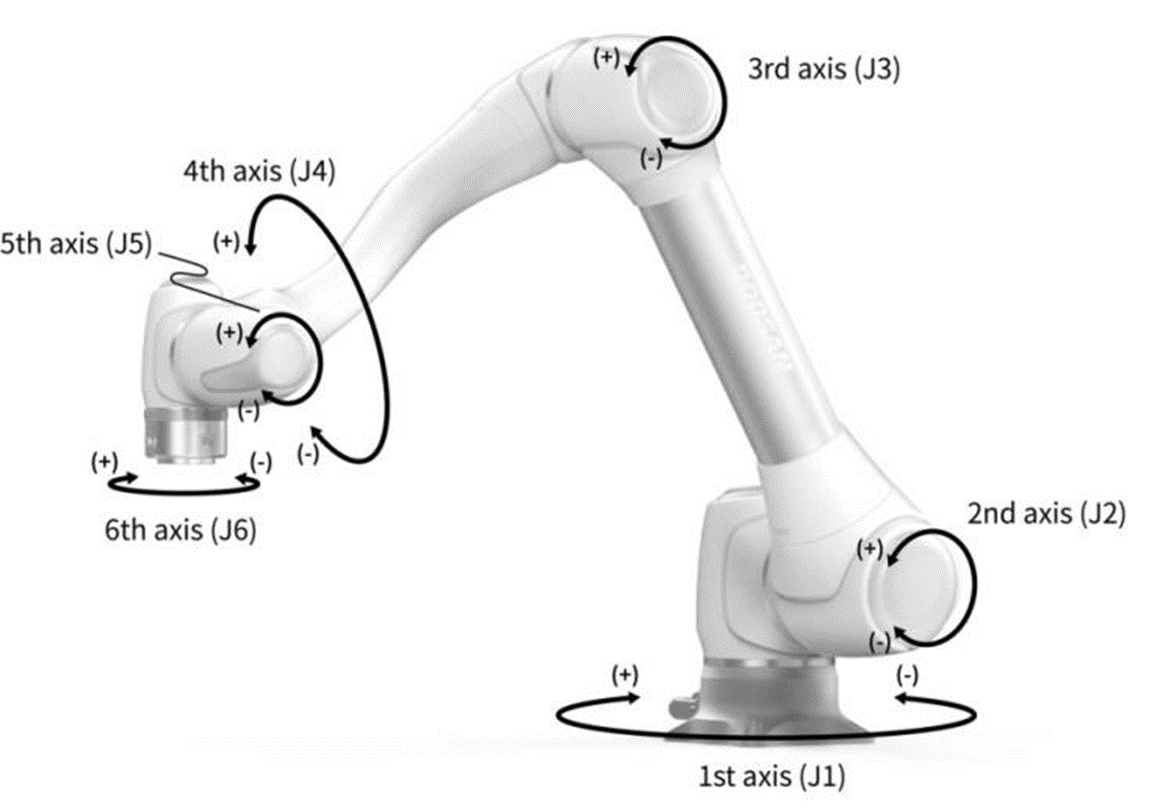
- Válassza ki a Joint (közös) lapot.
- Válassza ki az áthelyezni kívánt tengelyt. Például kiválaszthatja a J1.
- A robot mozgatásához nyomja meg a +/- gombot. A robot a +/- gomb megnyomásakor mozog, és az aktuális hely valós időben jelenik meg a képernyőn.
A következő módszer a robot mozgatásának módja a feladatmozgás segítségével a léptetőképernyőn:
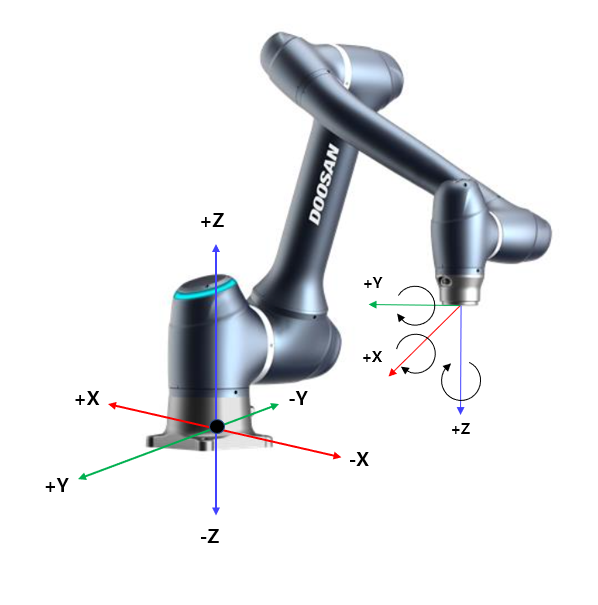
- Válassza ki a báziskoordinátákat. A robot az ALAPKOORDINÁTÁKNAK vagy A SZERSZÁM koordinátáinak megfelelően mozgatható.
- Válassza ki a mozgatni kívánt irányt. Például az X-tengely választható.
- A robot mozgatásához nyomja meg a +/- gombot. A robot a +/- gomb megnyomásakor mozog, és az aktuális hely valós időben jelenik meg a képernyőn.
A léptetőmozgással, mozgatással és igazítási mozgással kapcsolatos további információkért lásd Léptetőképernyő: , Képernyő áthelyezése Illetve.
Megjegyzés
- Ha a tényleges üzemmód billenőkapcsolója ki van kapcsolva a Jog képernyő bal felső részén, a robot csak a Jog képernyő bal oldalán található virtuális képernyőn mozog. A tényleges robot mozog, ha a tényleges üzemmód billenőkapcsolója be van kapcsolva.
A Jog Plus modul segítségével a felhasználó manuálisan is felfedezheti a teljes munkaterületet, vagy beállíthatja a műveleti területet robotként. Az egyes tengelyek mozgási szöge a kiválasztott működési tér és a biztonsági beállítás csukló szögkorlátja szerint korlátozható.
A Jog Plus funkció használatához érintse meg a Jog Plus modult a főmenüben.
- A Jog funkció nem használható a Szervo kikapcsolvaközben.
- A robot manuálisan működtethető a Jog Plus képernyőn, így a robot csak a Jog gomb megnyomásakor mozog.
- Lehetséges a robot mozgatása a Jog Plus (Jóg plusz) lap aktuális pozíciója alapján.
- A robot mozgatható acél szög / koordináták beállításával a Move (mozgatás) lap képernyőjén.
- Lehetőség van a referencia koordináták konfigurálására a Jog Plus Tab képernyőn, és a Move Tab képernyőn, mint egy közös vagy feladat.
Megjegyzés
- Ha a robot nem navigálható, mert a Jog Plus üzemmód működési terétől eltérő helyen található, állítsa a robot működési helyét „Nincs” értékre, hogy a robot navigálhatólegyen.
Megjegyzés
Ez a modul Auto módban nem érhető el. A jobb alsó sarokban található billenőgomb megérintésével a gomb kézi üzemmódban is elérhető.
A Job Plus (Job+) használata lehetővé teszi, hogy a jog funkciót egyszerre használja különböző munkák végzése közben. Ez akkor használható, ha a tanítás során a robotot a célpontra kell mozgatni, kézi vezérlés szükséges.
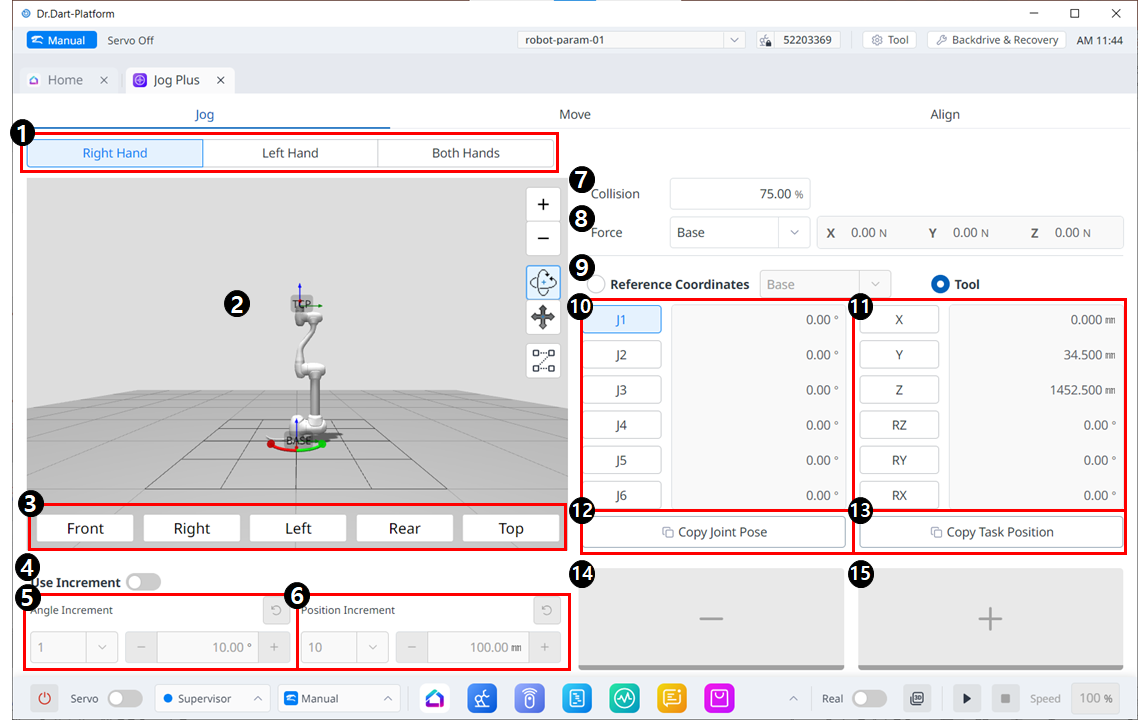
Jog menü elrendezése
| Tétel | Leírás | |
|---|---|---|
| 1 | Válassza ki a panel típusát | Kiválaszthatja az áthelyezés gomb helyét. |
| 2 | 3D szimuláció | Ez a 3D-s megtekintő, ahol láthatja, hogyan néz ki a robot. |
| 3 | Simulator Alignment | Ezt a részt használhatja a szimulátor irányítására. |
4 | Inkrement használata | Ezzel a gombbal engedélyezheti a szög- vagy pozíciónövekedést. |
| 5 | Szögnövekedés | Ebben a szakaszban van beállítva a kiválasztott tengely szögnövekménye. |
| 6 | Pozíciónövekmény | Ebben a szakaszban van beállítva a pozíciónövekmény a kiválasztott tengelyen. |
| 7 | Ütközés | Ebben a mezőben állíthatja be a robotütközést. |
| 8 | Erőfigyelés | Ebben a szakaszban állíthatja be az erőket az X, Y és Z tengelyeken az alap, az eszköz, a világ, a referencia és egyebek alapján. |
| 9 | Válassza ki a referencia koordináta-rendszert | Válasszon ki egy referencia-koordináta-rendszert a feladat koordinátáinak megjelenítéséhez vagy léptetéséhez a 11. ábrán. Ez lehet Base, World vagy User koordináta. |
| 10 | Közös panel | Kiválaszthatja a csukló tengelyét a kocogáshoz. |
| 11 | feladat panel | Kiválaszthatja a léptetéshez szükséges feladattengelyt. |
| 12 | Másolás Póz J gombot | Ezzel a gombbal másolhatja a J pózt. |
| 13 | Másolás Póz X gomb | Ezzel a gombbal másolhatja az X pozíciót. |
| 14 | Mozgatás – gomb | A robotot az egyes tengelyek alapján a - irányba mozgathatja. Ekkor a bal oldalon lévő 3D szimuláción kitalálhatja a - és + irányát. |
| 15 | Mozgatás + gomb | A robotot az egyes tengelyek alapján + irányba mozgathatja. Ekkor a bal oldalon lévő 3D szimuláción kitalálhatja a - és + irányát. |
Mozgatás
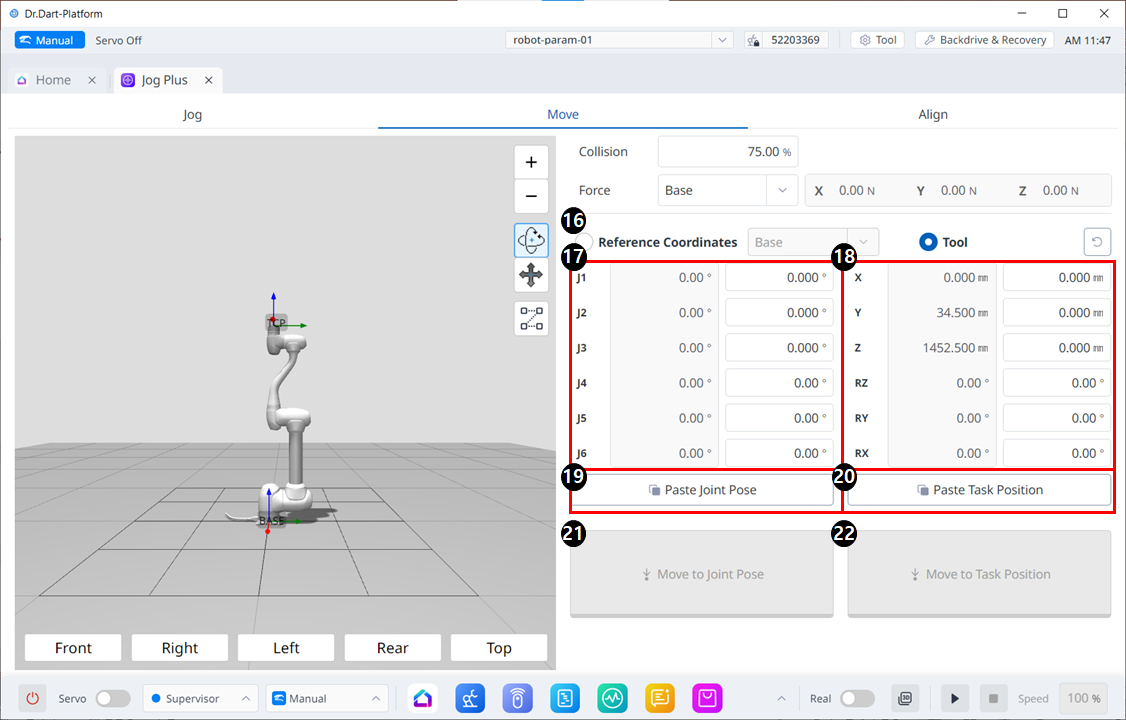
Menüelrendezés mozgatása
| Tétel | Leírás | |
|---|---|---|
| 16 | Reference Coordinates | Válassza ki a feladatkoordinátákhoz használandó referencia-koordináta-rendszert a 18. ábrán. Választhat Base, World vagy User koordináták közül. |
| 17 | Joint Posture | Megjeleníti a robot aktuális testtartását és a célízületi testtartást. |
| 18 | Task Posture | Megjeleníti a robot aktuális testtartását és a feladat célhelyzetét, amelyek illeszkednek a kiválasztott referencia-koordináta-rendszerhez. |
| 19 | Paste Joint Posture | Illessze be a vágólapra másolt testhelyzet-értéket a közös testhelyzet panelbe. |
| 20 | Paste Task Posture | Illessze be a vágólapra másolt testtartásértéket a feladat testhelyzet paneljére. |
| 21 | Joint Move button | Ez a gomb arra készteti a robotot, hogy a megcélzott ízületi pozícióba mozogjon. |
| 22 | Task Move button | Ez a gomb arra készteti a robotot, hogy a feladat célhelyzetébe lépjen. |