
Képernyő áthelyezése
Menüelrendezés mozgatása
| Tétel | Leírás | |
|---|---|---|
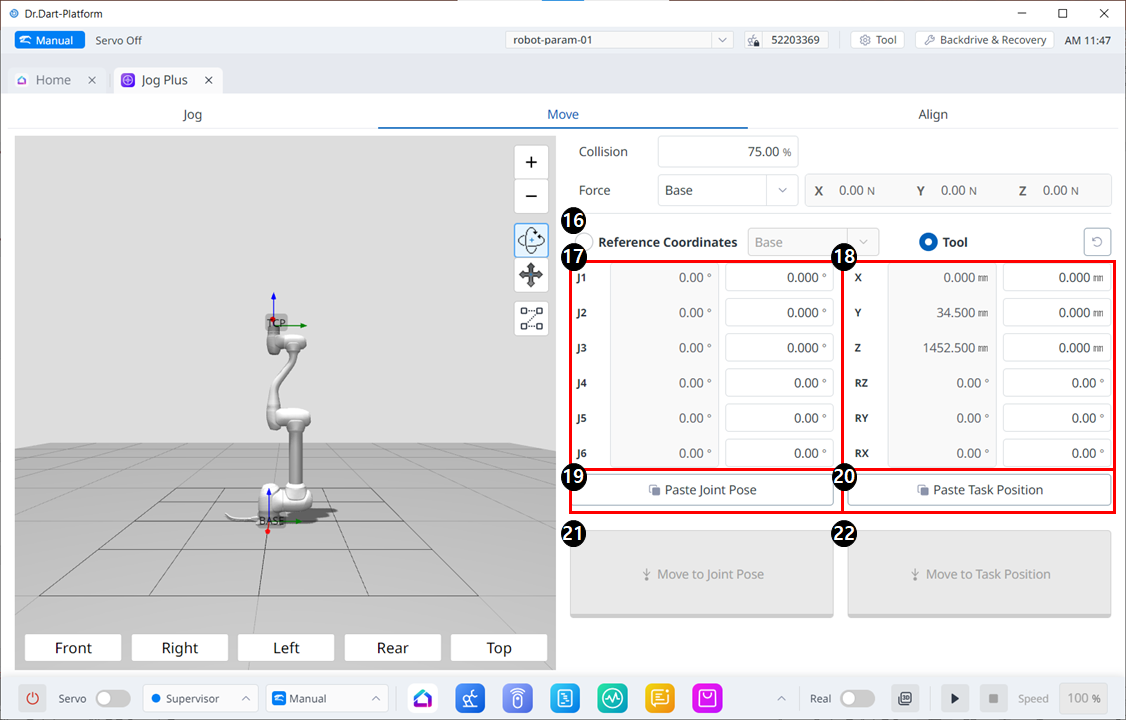
| 16 | Reference Coordinates | Válassza ki a feladatkoordinátákhoz használandó referencia-koordináta-rendszert a 18. ábrán. Választhat Base, World vagy User koordináták közül. |
| 17 | Joint Posture | Megjeleníti a robot aktuális testtartását és a célízületi testtartást. |
| 18 | Task Posture | Megjeleníti a robot aktuális testtartását és a feladat célhelyzetét, amelyek illeszkednek a kiválasztott referencia-koordináta-rendszerhez. |
| 19 | Paste Joint Posture | Illessze be a vágólapra másolt testhelyzet-értéket a közös testhelyzet panelbe. |
| 20 | Paste Task Posture | Illessze be a vágólapra másolt testtartásértéket a feladat testhelyzet paneljére. |
| 21 | Joint Move button | Ez a gomb arra készteti a robotot, hogy a megcélzott ízületi pozícióba mozogjon. |
| 22 | Task Move button | Ez a gomb arra készteti a robotot, hogy a feladat célhelyzetébe lépjen. |