Kötelező EGYSZERŰ 3 perc
A robot a csomagolásán van, hogy lehetővé tegye a könnyű szállítást vagy csomagolást. A robot használatához ki kell kapcsolni a csomagolás pózát. Mivel a robot olyan pózt tart fenn, amely meghaladja az Joint Angle (Joint Angle) határértéket, amikor a csomagolás pózban van, a biztonsági határérték megsértése miatt nem lehet a Servo (Szervo) állapotot beállítani. Ebben az állapotban a robot LED-je pirosan világít.
Ha van olyan eset, amikor a robot áthelyezése miatt csomagolni kell, állítsa be a csomagot a csomagolás módban a csomagolás pózával való mozgatással.
A csomagolási póz felszabadítása a következő:
Menüelemek
|
|
Tétel |
Leírás |
|---|---|---|
|
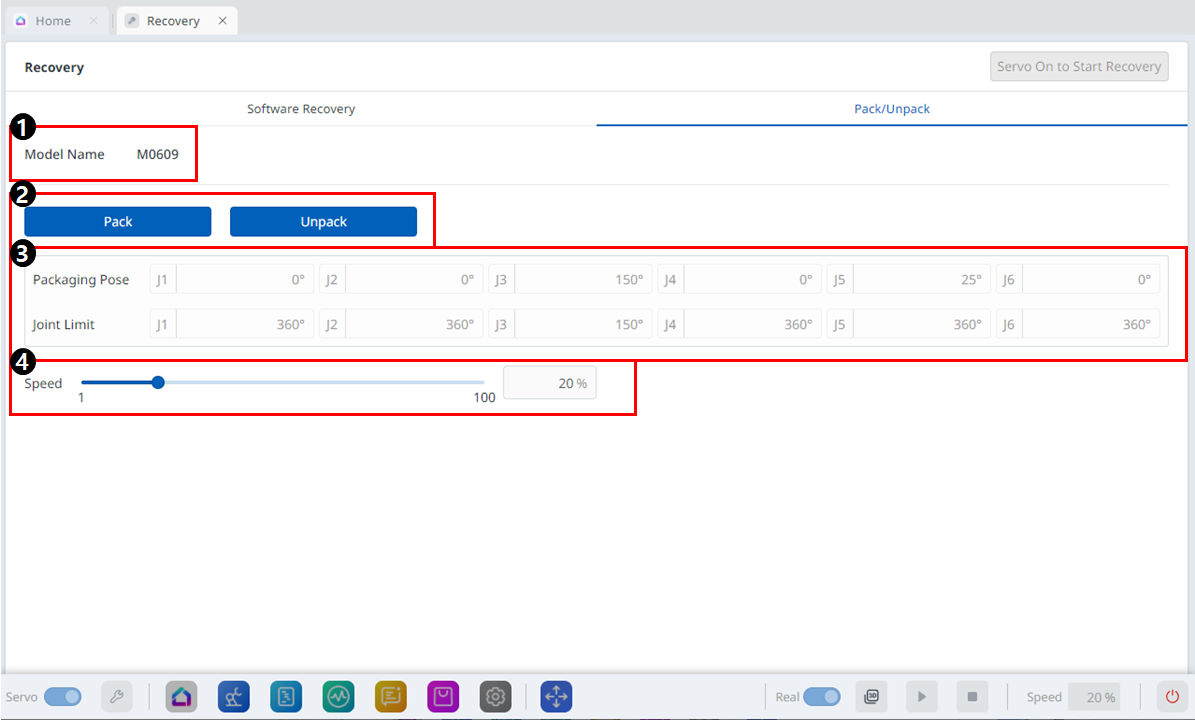
1 |
Modell neve |
Megjelenik a csatlakoztatott robotmodell neve. |
|
2 |
Csomagolás/kicsomagolás |
A Pack (csomag) vagy a Unpack (Kicsomagolás) lehetőség választható. |
|
3 |
Csomagolás Pose/Joint limit |
Megjelennek a pózban és az ízületben mért határértékek. |
|
4 |
Fordulatszám-arány |
A csomagolás vagy kicsomagolás mód sebessége egy csúszkával vagy bemenettel állítható. |
A csomagolási mód konfigurálásához kövesse az alábbi lépéseket:
-
Érintse meg a Recovery (Visszaállítás) menüt a fejléc panelen.

-
Válassza ki a csomagolási mód lapot.

-
Érintse meg a Servo on to Start Recovery (Szervo be a helyreállítás elindításához) gombot a csomagolási mód engedélyezéséhez.

-
A robot automatikusan a beállított csomagolási pózba lép.A csomag gomb lehetővé teszi, hogy a robotot Pack helyzetbe állítsa, a Kicsomagolás gomb pedig lehetővé teszi, hogy a robotot alapértelmezett kezdőpozícióba helyezze.