Paramètre de limite d'espace
L'élément de cellule de travail de limite d'espace définit une limite virtuelle au niveau de la zone la plus externe du robot. Le robot peut être utilisé sans définir de limites d'espace, mais il est recommandé de définir des limites d'espace pour assurer un fonctionnement sûr du robot.
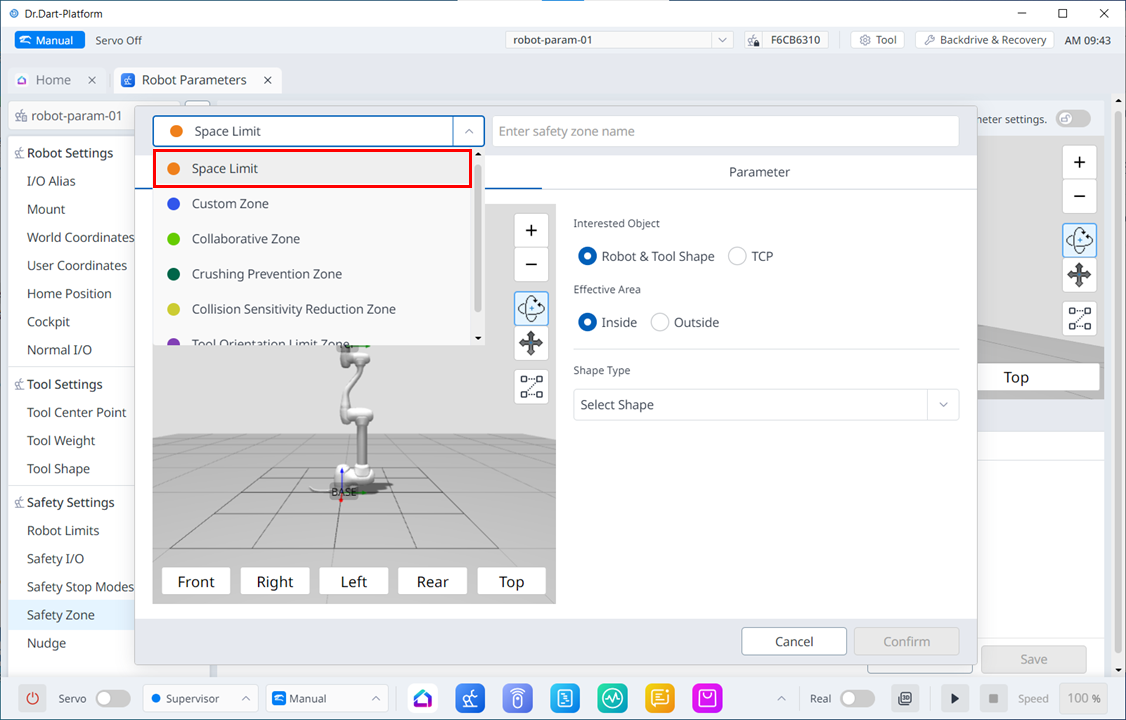
La limite d'espace peut être atteinte via le menu déroulant en haut à gauche dans Paramètres du robot > Paramètres de sécurité > espaces de travail de sécurité > Ajouter un nouvel espace de travail, et sous Type de forme, vous pouvez sélectionner sphère, cylindre, Cube, Cube incliné ou polyèdre à définir.
- Le point d'inspection peut être défini comme robot ou TCP, et l'espace valide peut être défini comme intérieur ou extérieur.
- La zone de surveillance peut être définie comme robot ou TCP. Il définit si la zone intérieure ou extérieure doit être détectée ou non.
- La valeur par défaut est la zone entière et l'intérieur défini.
- Le robot peut être réglé correctement après avoir été positionné dans la zone de sécurité définie.
Pour définir une limite d'espace pour le robot, sous espaces de travail de sécurité , appuyez sur le bouton Ajouter un nouvel espace de travail et sous Type de forme, sélectionnez l'un des types suivants : Cube, cylindre, boîte multiplan, sphère ou Cuboïde incliné. Le mot de passe de sécurité est requis lors de la configuration et de l'activation.