
Écran Jog
Il est possible de naviguer dans l'écran Job sur la base de la position actuelle du robot.
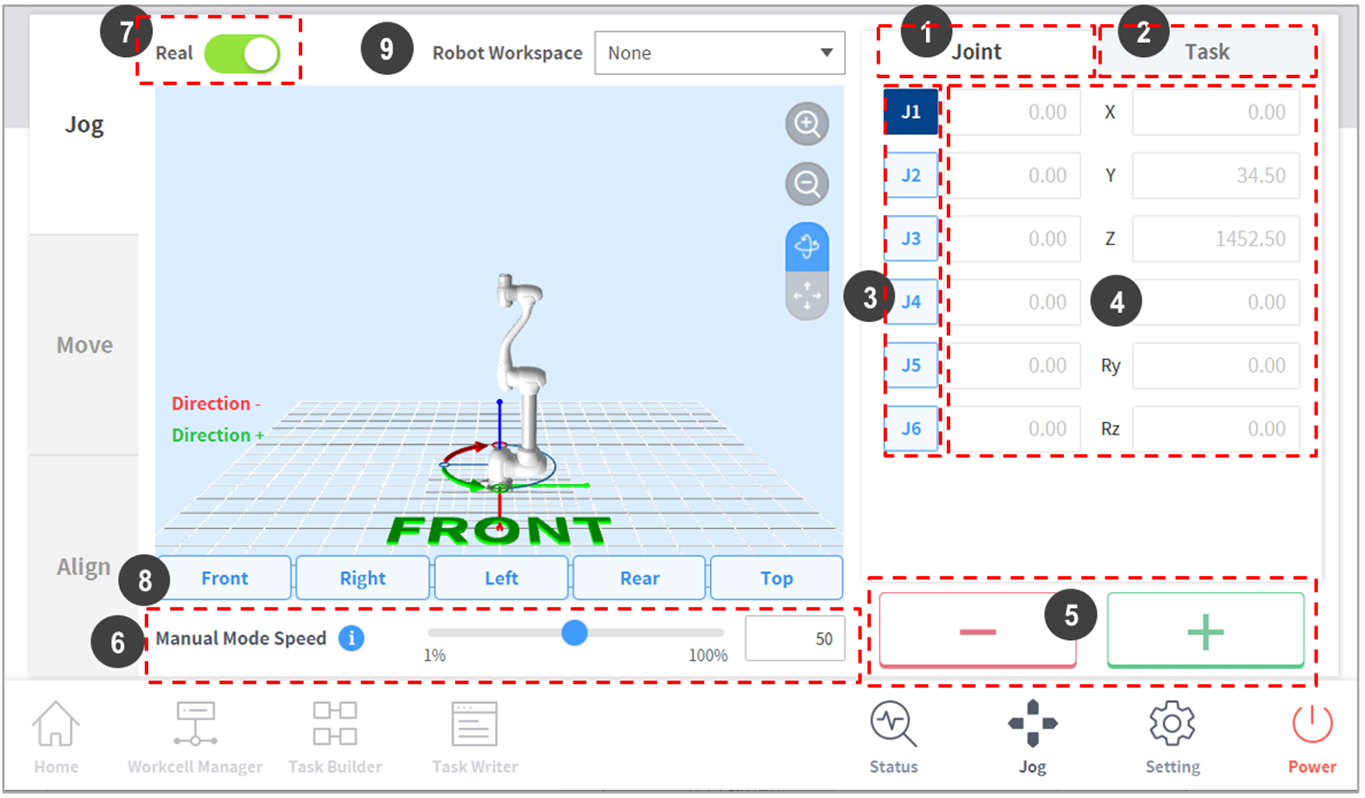
N° | Élément | Description |
|---|---|---|
1 | Joint | Configuration de l'articulation comme coordonnées de référence pour le mode jog. |
2 | Task | Configuration de la tâche comme coordonnées de référence du mode jog. |
3 | Select Axis | Sélection d'un axe de déplacement en mode jog.
|
4 | Coordinate Display | Les coordonnées du robot actuellement exécutées en mode Jog sont affichées. Si la position du robot change par sélection du bouton de direction, les coordonnées changent en conséquence. |
5 | Direction | Déplace le robot dans le sens + ou - de l'axe sélectionné. |
6 | Manual Mode Speed | Configure la vitesse de mouvement du robot en mode manuel. La vitesse peut être ajustée par glissement du curseur de la barre. Si le curseur de la barre est placé sur 100 %, la vitesse d'articulation maximale sur l'onglet Jog est de 30 deg/s et la vitesse de tâche maximale est de 250 mm/s. Cette vitesse influence la vitesse contrôlée par le bouton Jog et le bouton de mouvement. |
7 | Real Mode | Permet de faire fonctionner le robot en mode réel alors qu'il est en mode jog.
|
8 | Simulator Alignment | Sélection du sens d'alignement du robot affiché dans le simulateur. Appuyez sur l'un des boutons de direction pour aligner le robot dans la direction correspondante. |
9 | Robot Workspace | Affiche les informations sur l'espace de travail du robot enregistrées dans le gestionnaire des cellules de travail du simulateur de jog. Appuyez sur le menu déroulant pour choisir l'espace de travail à afficher. |


Remarque
- Limite de vitesse du TCP : conformément aux normes de sécurité, la vitesse de fonctionnement en mode jog et la vitesse d'activation du bouton de mouvement est limitée à 250 mm/s.
- Si le robot s'arrête car il a atteint la limite d'articulation ou en cas de détection de collision pendant le déplacement du robot en mode jog, définissez le mode de récupération de sécurité et déplacez le robot pour le positionner de façon à respecter la limite d'angle d'articulation. Pour plus d'informations à propos du Safety Recovery Mode (Mode de récupération de sécurité), référez-vous à « Safety Recovery Mode (mode de récupération de sécurité)».