
Réglage de l'outil
Point central de l'outil
Lors de la configuration du point central de l'outil (TCP), la position et l'angle de rotation basés sur les coordonnées du bord tombé doivent également être définis. ime, la distance entre le point de départ par défaut de la coordonnée du bord tombé et le point du centre-outil (TCP) dans les directions X, y et Z ne peut pas être supérieure à 10000 mm. Notez également que le contrôle de la force, le contrôle de conformité et la fixation du point d'apprentissage direct ne sont disponibles que lorsque les longueurs converties de X, y et Z (![]() ) sont inférieures ou égales à 300 mm.
) sont inférieures ou égales à 300 mm.
Si le point central de l'outil (TCP) est configuré à l'aide du calcul automatique, le calcul est effectué uniquement sur la base des positions X, y et Z, il est donc nécessaire de saisir l'angle de rotation. L'angle de rotation peut être défini avec RZ, RY et RX et il est basé sur la méthode de rotation "Euler Z-Y-Z".

Les définitions de l'axe des coordonnées exprimé avec x, y, z et de l'axe des coordonnées exprimé avec X, y, Z sont les suivantes :
Axe des coordonnées de la “coordonnée du bord tombé” (x, y, z) : La direction de l'axe des coordonnées de la « coordonnée du bord tombé » définie à l'extrémité du bord tombé est identique à la coordonnée du robot lorsque l'angle d'articulation du robot est (0,0,0,0,0,0).
Axe des coordonnées de la “coordonnée TCP” (X, y, Z): Il est réglé à l'extrémité ou au point de travail de l'outil installé à l'extrémité de la bride. A ce stade, l'angle de rotation de la "coordonnée TCP" est défini en fonction de la "coordonnée du bord tombé" dans l'ordre de 1) à 3) des éléments suivants :
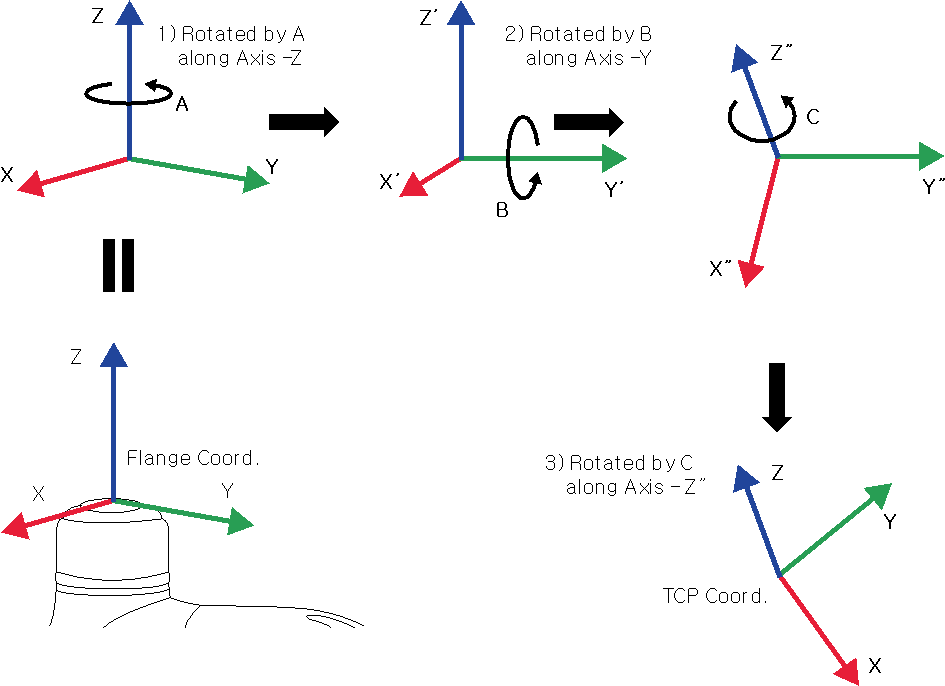
Faites pivoter D'Un degré le long de l'axe z des coordonnées du bord tombé.
Faites pivoter B degrés le long de l’axe y’ de la coordonnée pivotée selon 1).
Faites pivoter C degrés le long de l’axe z’’ de la coordonnée pivotée selon 2).
Voici quelques exemples de configuration du TCP selon la méthode décrite ci-dessus :
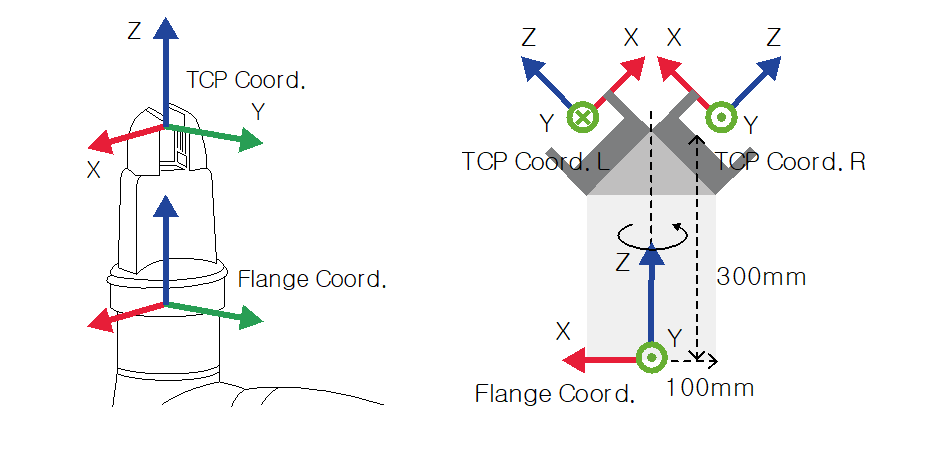
[X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pince générale avec décalage dans la direction Z uniquement (TCP Coord)
[X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pince gauche avec angle de 45 degrés (TCP Coord. L)
[X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pince droite avec angle de 45 degrés (TCP Coord. R)
Menu
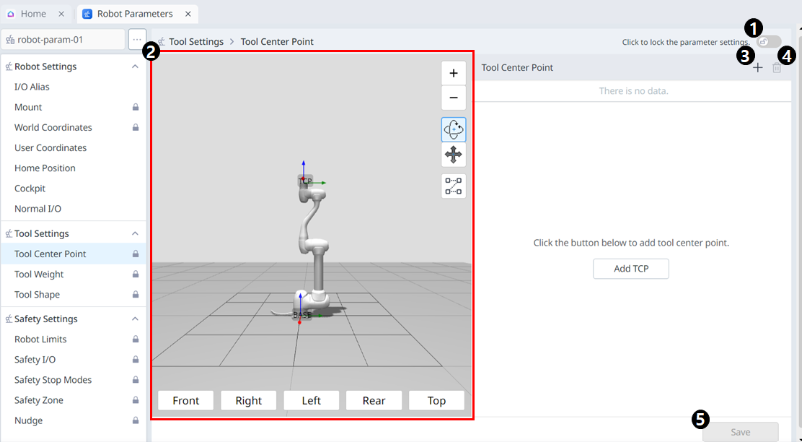
Éléments | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | 3D Simulation | C'est ici que vous pouvez simuler le point central de l'outil configuré. |
| 3 | Ajout | Ce bouton vous permet d'ajouter TCP. |
| 4 | Suppression | Ce bouton vous permet de supprimer le TCP sélectionné. |
| 5 | Enregistrer | La valeur de réglage peut être appliquée. |
Lorsque les paramètres sont verrouillés, l'écran ci-dessous s'affiche.
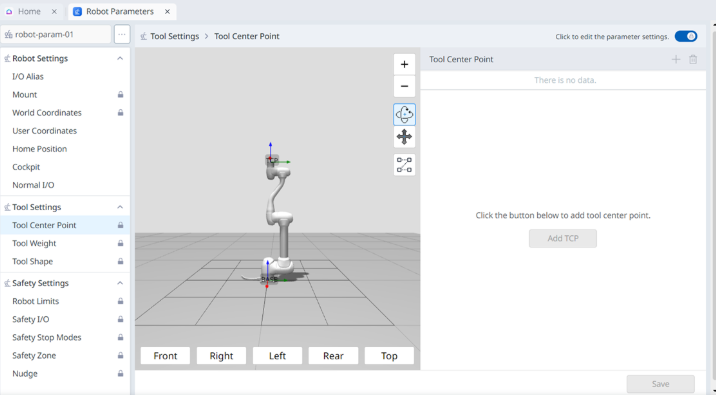
À ce stade, le TCP sélectionné est affiché en bleu, comme illustré ci-dessous.

Poids de l'outil
Vous pouvez définir le poids de l'outil monté sur la bride en ajoutant un poids outil. Le poids de l'outil peut être défini en sélectionnant Robot Parameters > Paramètres de l'outil > poids de l'outil.
Le poids de l'outil peut être mesuré à l'aide de la fonction de mesure automatique.
Il est recommandé d'ajouter un poids d'outil pour chaque outil avec une pièce. Si le poids de la pièce est trop lourd, le robot peut reconnaître le poids de la pièce comme une force externe. C'est parce que le robot détermine cette force externe comme une collision et s'arrête.
Lors de la création d'une tâche, modifiez le poids en fonction du processus de modification du poids de l'outil. Par exemple, il est possible de configurer une tâche pour sélectionner le poids de l'outil standard avant de saisir une pièce, et sélectionner le poids de l'outil avec la pièce après avoir saisi une pièce.
Le poids de l’outil activé peut être défini comme poids standard de l’outil en appuyant sur l’icône de réglage de l’outil (![]() ) située en haut du boîtier d’apprentissage.
) située en haut du boîtier d’apprentissage.
L'ensemble du paramètre d'outil est identique à l'ensemble des autres commandes. La commande définir peut être utilisée lors de la modification du poids de l'outil pendant l'exécution d'une tâche. Pour plus d'informations, reportez-vous au module Éditeur de tâches.
Remarque
Jusqu'à cinquante poids d'outil différents peuvent être enregistrés.
Dans le cas de la série M, l'accélération s'ajuste automatiquement lorsque le poids maximal de l'outil dépasse le poids maximal de l'outil.
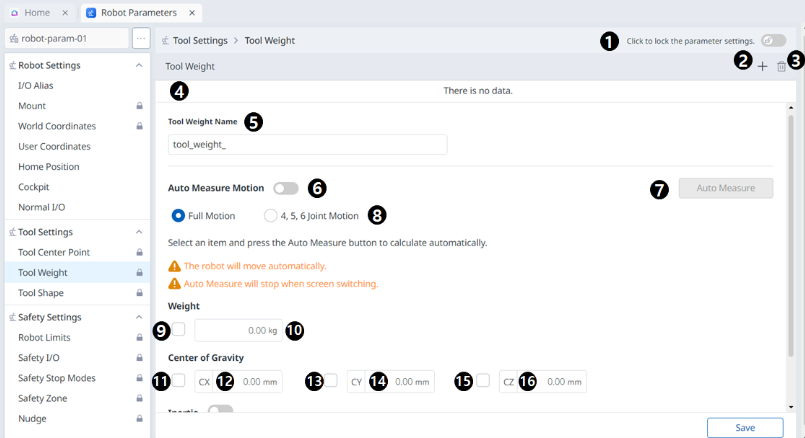

Menu
Éléments | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Ajout | Ce bouton vous permet d'ajouter un nouveau poids outil. |
| 3 | Suppression | Ce bouton permet de supprimer un poids outil. |
| 4 | Liste des poids de l'outil | Liste des poids d'outil configurés. |
| 5 | Nom du poids de l'outil | C’est ici que vous pouvez entrer un nom pour le poids de l’outil. |
| 6 | Mesure automatique du mouvement | Ce bouton vous permet de lancer la mesure automatique. |
| 7 | Mesure automatique | Ce bouton vous permet de sélectionner une option et d'exécuter une mesure automatique pour celle-ci. |
| 8 | Sélection de mouvement | Vous pouvez sélectionner le mouvement souhaité dans les options. |
| 9 | Sélection de l'utilisation du poids | Vous pouvez choisir d'utiliser le poids. Cette case de sélection est désactivée pour les séries E ou A sans capteurs FPT. |
| 10 | Entrée de poids | C'est ici que vous pouvez entrer le poids souhaité. |
| 11 | Sélection de l'utilisation de Center of Gravity CX | L'utilisation du centre de gravité CX peut être sélectionnée. |
| 12 | Entrée CX | CX peut être saisi. |
| 13 | Sélection de l'utilisation de Center of Gravity CY | L'utilisation du centre de gravité CY peut être sélectionnée. |
| 14 | Entrée CY | CY peut être saisi. |
| 15 | Sélection de l'utilisation de Center of Gravity CZ | L'utilisation du centre de gravité CZ peut être sélectionnée. |
| 16 | Entrée CZ | CZ peut être saisi. |
| 17 | Indique s'il faut utiliser l'inertie | Cette case à cocher vous permet de choisir d'utiliser ou non l'inertie. |
| 18 | Entrée lxx | Une entrée lxx pour l'inertie peut être saisie. |
| 19 | lyy Input | Une entrée lyy pour l'inertie peut être saisie. |
| 20 | Entrée lzz | Une entrée lzz pour l'inertie peut être saisie. |
| 21 | Entrée lxy | Une entrée lxy pour l'inertie peut être saisie. |
| 22 | Entrée lyz | Une entrée lyz pour l'inertie peut être saisie. |
| 23 | Entrée lzx | Une entrée lzx pour l'inertie peut être saisie. |
| 24 | Enregistrer | Ce bouton vous permet de sauvegarder les valeurs de réglage. |
Forme de l'outil
La forme de l'outil installé sur la bride peut être définie en ajoutant une forme d'outil.
La forme outil peut être définie dans le Robot Parameters module > Paramètres outil > forme outil. Pour plus d’informations, consultez la forme de l’outil.
Le robot détermine l'état de violation de limite d'espace en fonction du TCP (point central de l'outil) de l'extrémité du robot et du corps du robot. Si le robot réel a une forme d'outil plus grande que le TCP défini, une forme d'outil doit être ajoutée pour protéger la pièce et l'outil.
Soyez prudent car la zone que le robot peut manœuvrer diminuera si la forme de l'outil est trop grande.
L'élément de forme d'outil n'est disponible qu'une fois enregistré (confirmé) et que le commutateur à bascule est activé. La forme de l’outil activée peut être définie comme forme standard de l’outil en appuyant sur l’icône de réglage de l’outil (![]() ) située en haut du boîtier d’apprentissage.
) située en haut du boîtier d’apprentissage.
L'ensemble du paramètre d'outil est identique à l'ensemble des autres commandes. La commande définir peut être utilisée lors de la modification de la forme outil pendant l'exécution d'une tâche. Pour plus d'informations, reportez-vous au module Éditeur de tâches.
Remarque
Jusqu'à cinquante formes d'outils différentes peuvent être enregistrées.
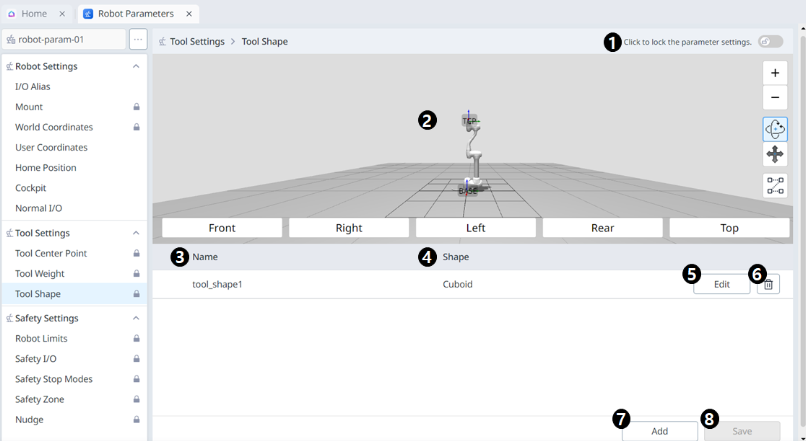
Menu
Éléments | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | 3D Simulation | C'est là que vous pouvez simuler en 3D le résultat de la forme outil configurée. |
| 3 | Nom de la forme outil | Nom de l'outil configuré. |
| 4 | Forme de l'outil | Forme de l'outil configuré. |
| 5 | Modification de la forme outil | Ce bouton permet de modifier la forme outil configurée. |
| 6 | Suppression de la forme outil | Ce bouton vous permet de supprimer la forme d’outil sélectionnée. |
| 7 | Ajout d'une forme outil | Une forme d'outil peut être ajoutée. |
| 8 | Application | Ce bouton vous permet d'appliquer la forme outil après l'avoir définie. |
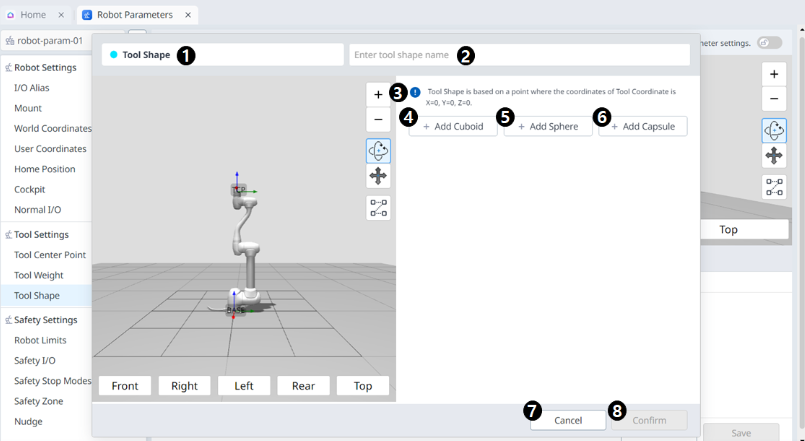
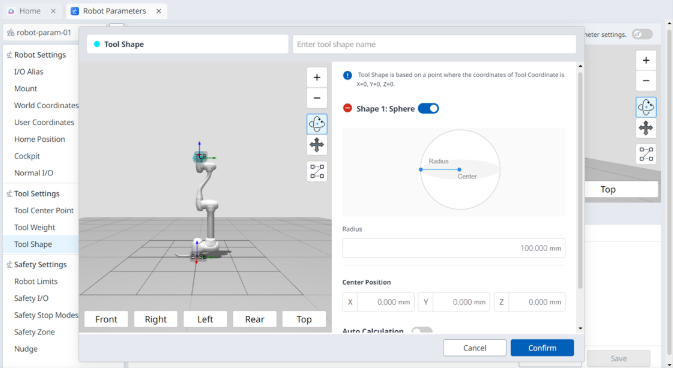
Menu
Éléments | Description | |
|---|---|---|
| 1 | Forme de l'outil | Cela indique que ce volet est une fenêtre contextuelle forme outil. |
| 2 | Saisie d'un nom | Il s'agit d'un champ dans lequel vous pouvez saisir le nom de la forme outil. |
| 3 | Message d'avertissement | Attention lors de la configuration |
| 4 | Ajouter un nouveau cuboïde | Ce bouton vous permet d’ajouter un cuboïde. |
| 5 | Ajouter une nouvelle sphère | Ce bouton vous permet d’ajouter un sphère. |
| 6 | Ajouter une nouvelle capsule | Ce bouton vous permet d’ajouter une capsule. |
| 7 | Annuler | Ce bouton vous permet d’annuler le réglage. |
| 8 | Confirmez | Ce bouton vous permet de confirmer le réglage. |
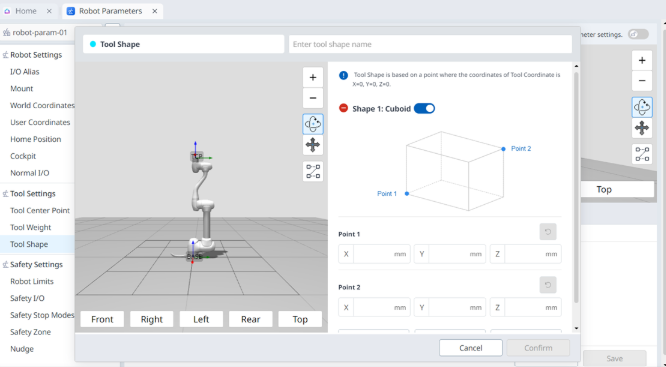
Une fois le cube/sphère/capsule ajouté, l'affichage est vu comme ci-dessous.
 |  |
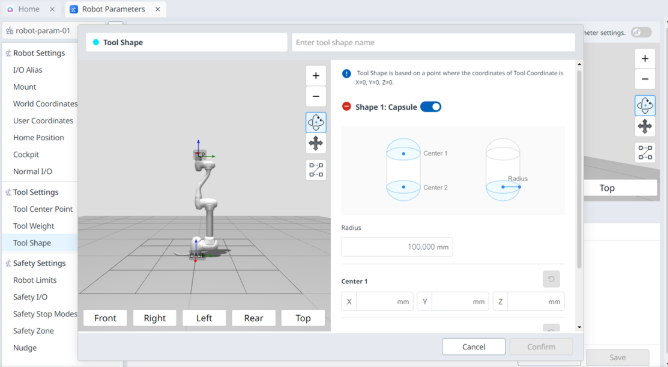 |