
Pantalla Avance
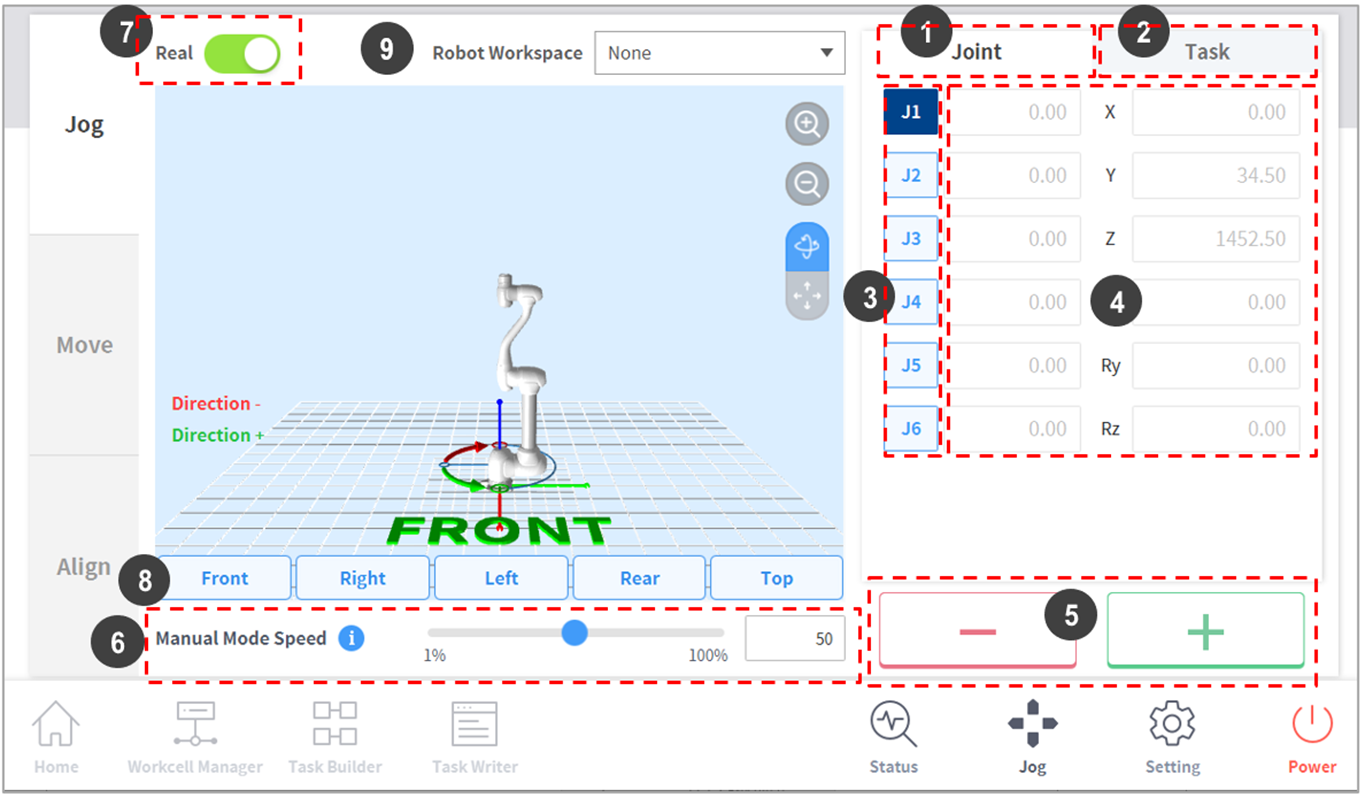
Es posible dirigir el robot en función de su posición actual en la pestaña Avance.
N.º | Elemento | Descripción |
|---|---|---|
1 | Joint | Configura la articulación como la coordenada de referencia para el modo de avance. |
2 | Task | Configura la tarea como la coordenada de referencia para el modo de avance. |
3 | Select Axis | Seleccione un eje para mover en modo avance.
|
4 | Coordinate Display | Muestra las coordenadas del robot que actualmente está operado en modo de Avance. Si la posición del robot cambia al pulsar el botón de dirección, también cambia la coordenada. |
5 | Direction | Mueve el robot en la dirección + o - en el eje seleccionado. |
6 | Manual Mode Speed | Configura la velocidad de movimiento del robot en modo manual. La velocidad se puede ajustar arrastrando el puntero deslizante. Si el puntero deslizante se encuentra en 100 %, la máxima velocidad correspondiente de la articulación en la pestaña Avance es 30°/s, y la velocidad de tarea máxima es 250 mm/s. Esta velocidad influye sobre la velocidad controlada por los botones de avance y de movimiento. |
7 | Real Mode | Configura la opción para operar o no el robot en modo real mientras está en modo de avance.
|
8 | Simulator Alignment | Selecciona la dirección de alineación del robot que se muestra en el simulador. Al pulsar un botón de dirección, el robot se alinea en la dirección correspondiente. |
9 | Robot Workspace | Muestra la información del espacio de trabajo del robot registrada en el administrador de celdas de trabajo del simulador de avance. Toque el menú desplegable para seleccionar el espacio de trabajo que desea visualizar. |


Nota
- Límite de velocidad del TCP: La mayor velocidad de funcionamiento durante la operación del botón de avance y movimiento se limita a 250 mm/s de acuerdo con las políticas de seguridad.
- Si el robot se detiene porque ha alcanzado el límite articular o si se detectó una colisión mientras se movía al robot con el modo de avance, establezca el modo de recuperación de seguridad y mueva al robot para posicionarlo dentro del límite del ángulo articular. Para obtener más información acerca del modo de recuperación de seguridad, consulte “Modo de recuperación de seguridad”