Lista de componentes
|
|
|
Manipulador |
Controlador (opcional: Véase el apéndice) |
|
|
|
Enseñar colgante |
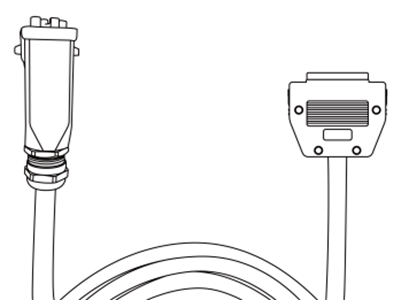
Controlador de cable de alimentación |
|
|
|
Cable de conexión del manipulador |
Manual de usuario / guía rápida |
Nombre de cada parte y funciones
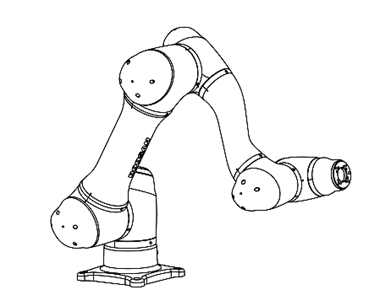
Manipulador
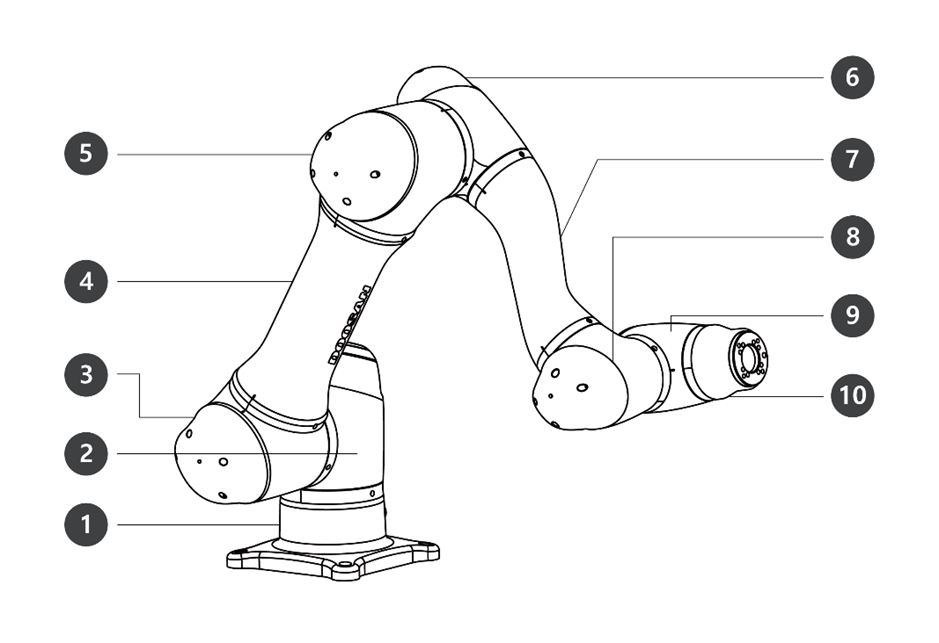
Nombre de cada parte
|
No. |
Nombre |
No. |
Nombre |
|---|---|---|---|
|
1 |
Base |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Link1 |
9 |
J6 |
|
5 |
J3 |
10 |
Brida de herramienta |
ㅤ
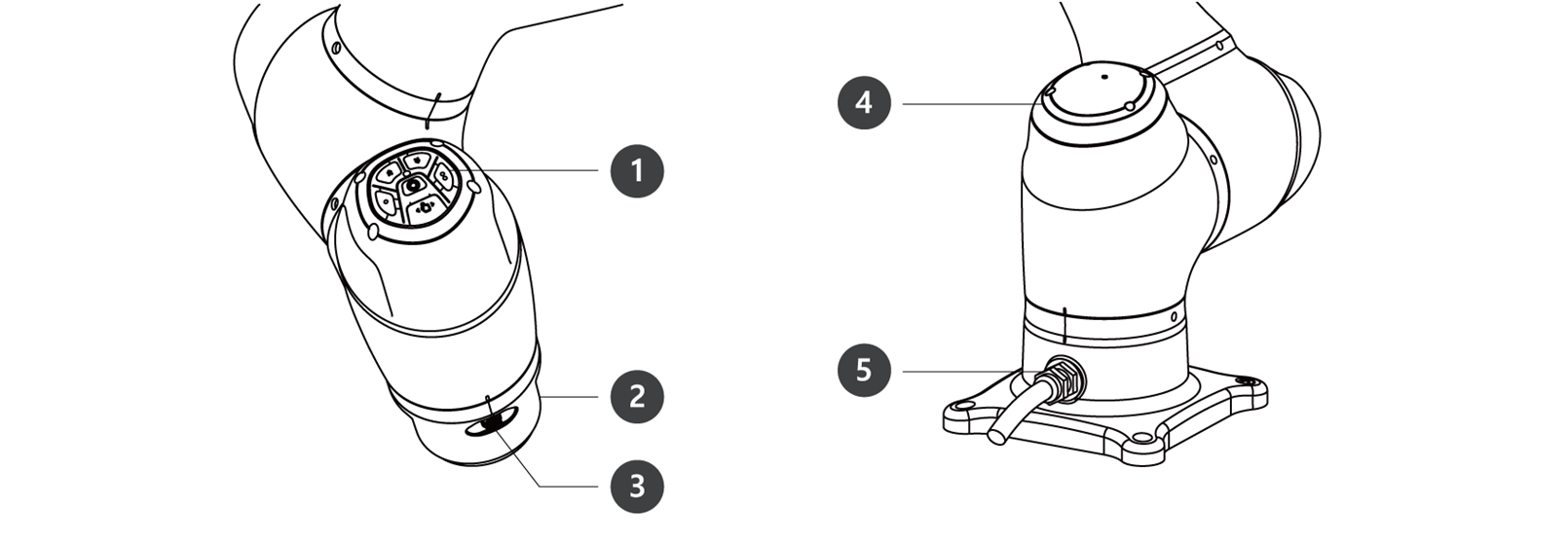
Características clave
|
No. |
Temas |
Descripción |
|---|---|---|
|
1 |
Cockpit |
[Opción] Controlador utilizado para la enseñanza directa. |
|
2 |
Brida de herramienta |
Área para instalar herramientas. |
|
3 |
Brida I/O |
Puerto I/O para control de herramientas.
|
|
4 |
LED (1 eje) |
Muestra el estado del robot con diferentes colores. Para obtener más información sobre el estado del robot, consulte el Estatus y color led de brida para cada modo. |
|
5 |
Conector |
Utilizado para suministrar energía y comunicación del robot. |
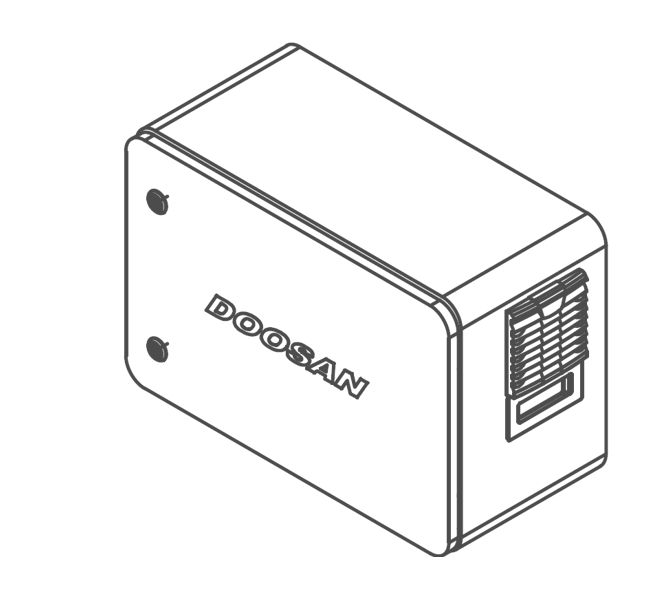
Controlador
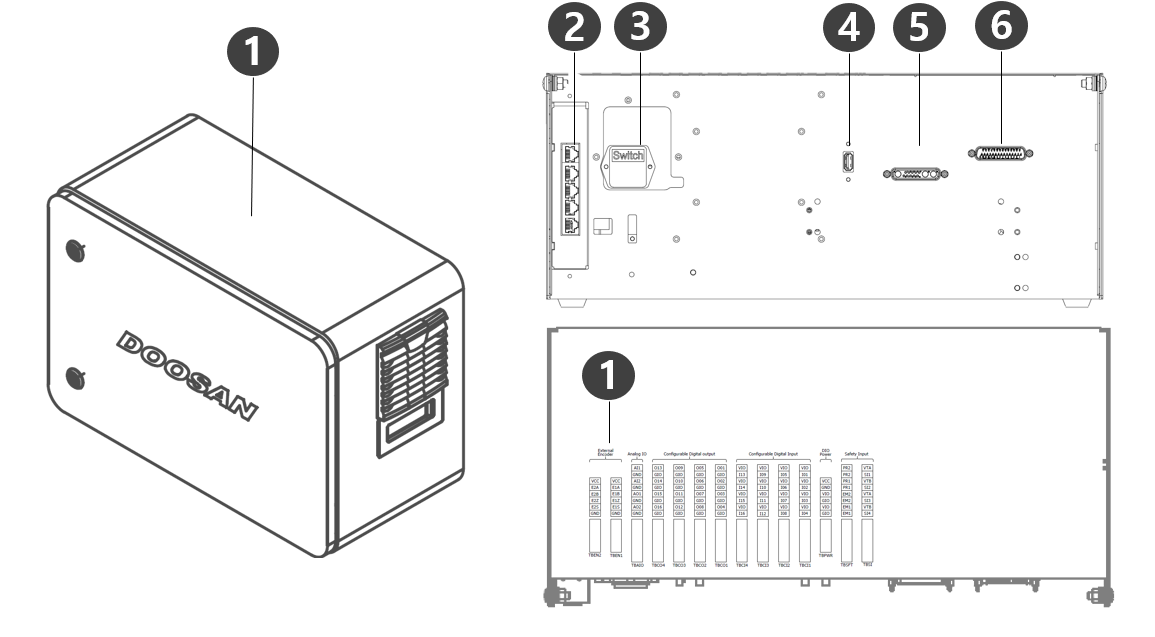
|
No. |
Temas |
Descripción |
|---|---|---|
|
1 |
Terminal de conexión E/S (interno) |
Se puede conectar con controladores o periféricos de otros robots. |
|
2 |
Terminal de conexión de red |
Se utiliza para conectarse al terminal de conexión de red dentro del controlador para usar ordenadores portátiles, dispositivos TCP/IP y equipos Modbus. Durante la configuración inicial, el conector RJ45 del cable LAN ubicado en el lado derecho del terminal de conexión de red debe estar conectado al terminal. |
|
3 |
Terminal de conexión de energía/interruptor |
Se utiliza para conectar la alimentación de red del controlador para encenderlo o apagarlo. Para obtener más información, consulte Encienda/apague el sistema. |
|
4 |
Terminal de conexión USB |
Se utiliza para almacenar registros creados mientras el robot está funcionando en el almacenamiento USB, o para exportar e importar tareas. |
|
5 |
Terminal de conexión de cable manipulador |
Se utiliza para conectar el cable del manipulador al controlador. |
|
6 |
Enseñar terminal de conexión de cable colgante |
Se utiliza para conectar el cable colgante de Teach al controlador. |
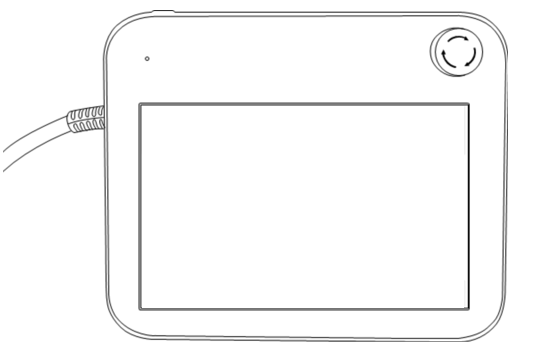
Enseñar colgante
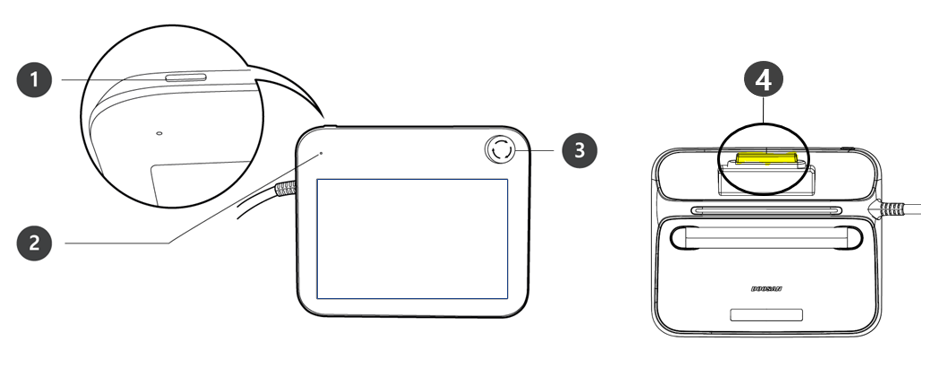
|
No. |
Temas |
Descripción |
|---|---|---|
|
1 |
Botón de encendido |
|
|
2 |
Potencia led |
|
|
3 |
Botón de parada de emergencia |
|
|
4 |
Botón de guía manual (3PE 3 Posición Activar Interruptor) |
|
Nota
-
Si el colgante Teach necesita ser protegido y montado durante el funcionamiento, la cubierta blanda suministrada por nosotros hace que sea más seguro y fácil de usar.
-
Nuevo TP (TP-02) función añadida: Guía de mano doble función
-
El TP existente (TP-01) no se puede utilizar en el controlador integrado. (Mapa de pines cambiado debido al Switch 3PE)
-
El nuevo TP (TP-02) se puede utilizar en el controlador existente, pero el led se cambia a un solo color (rojo) y se muestra, y no se pueden utilizar funciones adicionales.
-
Configuración del sistema
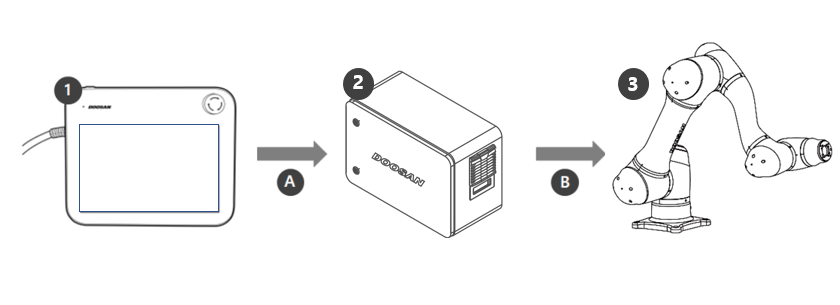
|
No. |
Nombre |
Descripción |
|---|---|---|
|
1 |
Enseñar colgante |
Este dispositivo gestiona todo el sistema y es capaz de enseñar posturas específicas del robot o hacer ajustes relacionados con los manipuladores y controladores. |
|
2 |
Controlador |
Controla el movimiento del robot de acuerdo con la pose o movimiento establecido por el colgante Teach. Cuenta con varios puertos de E/S que permiten la conexión y el uso de diversos equipos y dispositivos. |
|
3 |
Manipulador |
Es un robot colaborativo industrial que puede realizar tareas de transporte o montaje con diversas herramientas. |
|
A |
Mando/Supervisión |
|
|
B |
Fuente de alimentación/red |
|