
Configuración de la herramienta
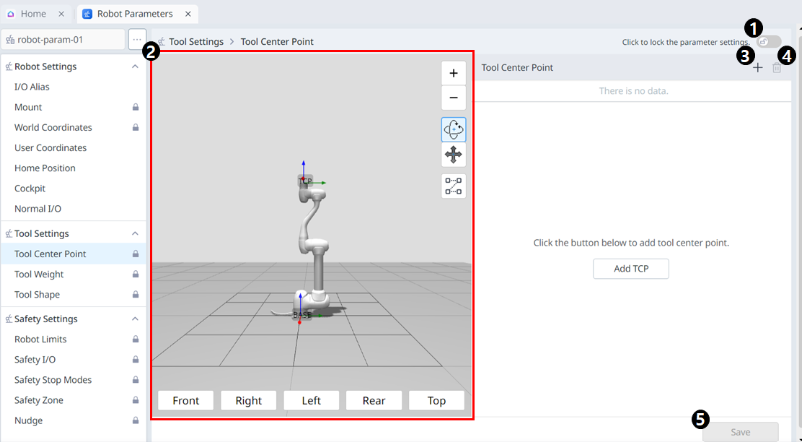
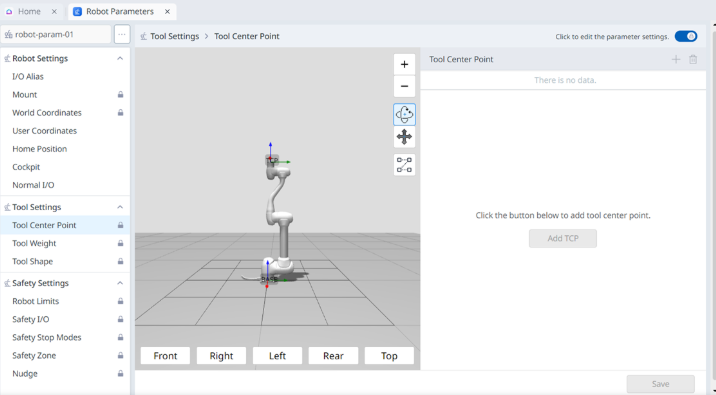
Punto de centro de herramientas
Al configurar el punto central de la herramienta (TCP), también se debe definir la posición y el ángulo de rotación basado en las coordenadas de brida. ime, la distancia desde el punto de inicio predeterminado de la coordenada de brida hasta el punto centro de herramientas (TCP) en las direcciones X, Y y Z no se puede establecer para ser mayor de 10000 mm. Tenga en cuenta también que el Control de Fuerza, el Control de Cumplimiento y la fijación directa del punto de enseñanza solo están disponibles cuando las longitudes convertidas de X, Y y Z (![]() ) son 300 mm o más cortas.
) son 300 mm o más cortas.
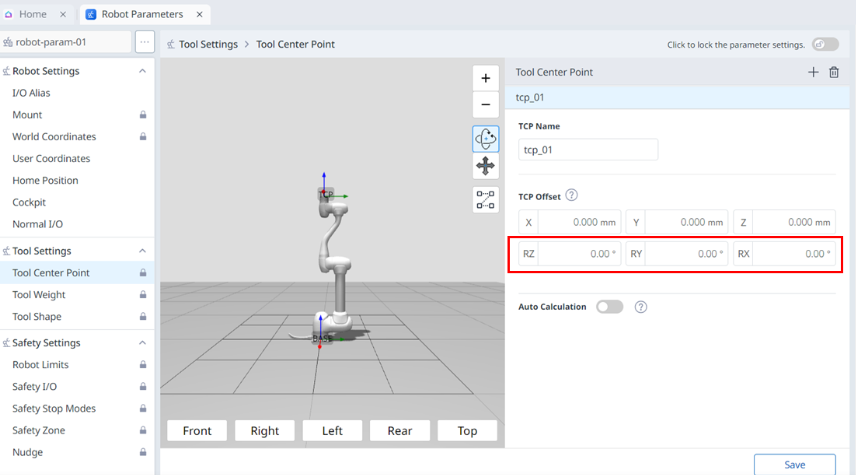
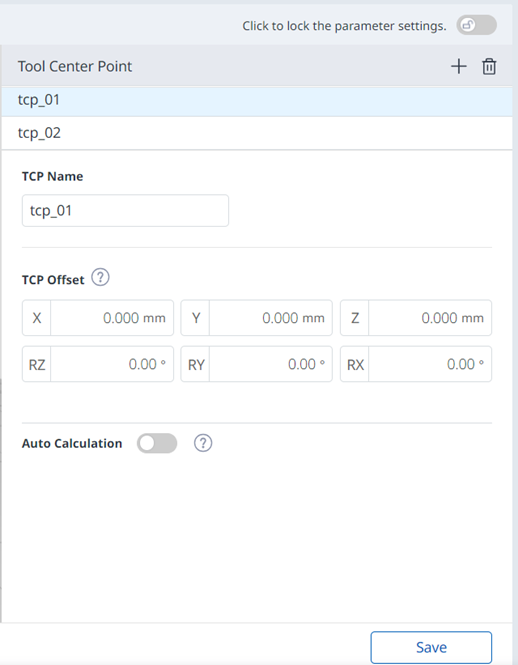
Si el punto central de la herramienta (TCP) está configurado usando Auto Calculate, el cálculo se realiza basándose únicamente en las posiciones X, Y y Z, por lo que es necesario introducir el ángulo de rotación. El ángulo de rotación se puede definir con RZ, RY y RX y se basa en el método de rotación "Euler Z-Y-Z".
Las definiciones del eje de coordenadas expresadas con x, y, z y el eje de coordenadas expresadas con X, Y, Z son las siguientes:
Eje de coordenadas de “Coordenadas de brida” (x, y, z): La dirección del eje de coordenadas de la “coordenada de brida” definida al final de la brida es idéntica a la coordenada del robot cuando el ángulo de articulación del robot es (0,0,0,0,0,0).
Eje de coordenadas de la “coordenada TCP” (X, Y, Z): Esto se establece en el extremo o en el punto de trabajo de la herramienta instalada en el extremo de la brida. En este momento, el ángulo de rotación de la “coordenada TCP” se define en base a la “coordenada de brida” en el orden de 1) a 3) de lo siguiente:
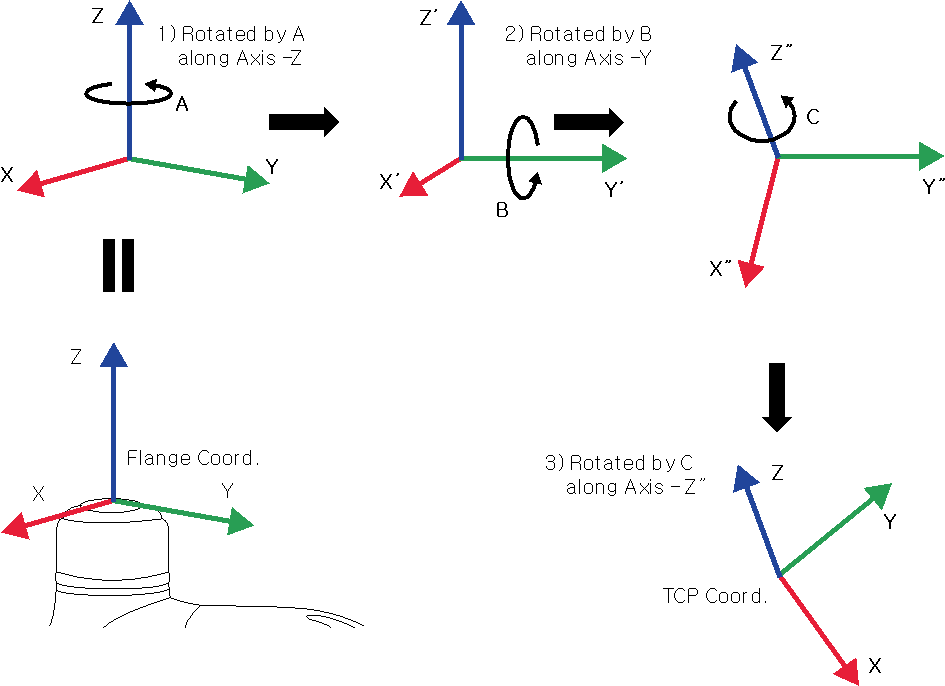
Rotar A grados a lo largo del eje z de la coordenada de la brida.
Rotar B grados a lo largo del eje y’ de la coordenada girada de acuerdo con 1).
Rotar C grados a lo largo del eje z’’ de la coordenada girada de acuerdo con 2).
Aquí hay algunos ejemplos de configuración del TCP de acuerdo con el método descrito anteriormente:
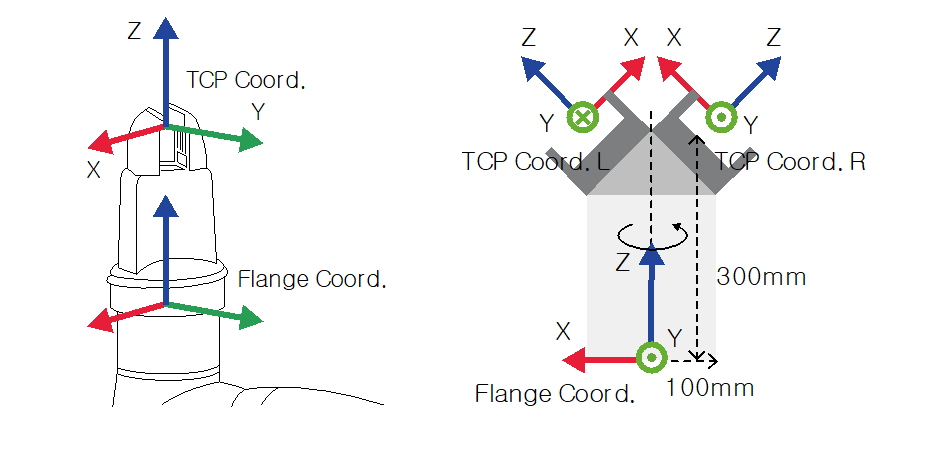
[X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza general con solo un desplazamiento de dirección Z (TCP Coord)
[X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza izquierda con ángulo de 45 grados (TCP Coord. L)
[X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza derecha con ángulo de 45 grados (TCP Coord. R)
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | 3D Simulation | Aquí es donde puede simular el punto de centro de herramientas configurado. |
| 3 | Añadiendo | Este botón le permite agregar TCP. |
| 4 | Suprímase | Este botón le permite eliminar el TCP seleccionado. |
| 5 | Guardar | Este botón permite guardar los valores de configuración. |
Cuando los ajustes están bloqueados, se ve la pantalla de abajo.
En este momento, el TCP seleccionado se ve en azul como se muestra a continuación.
Peso de la herramienta
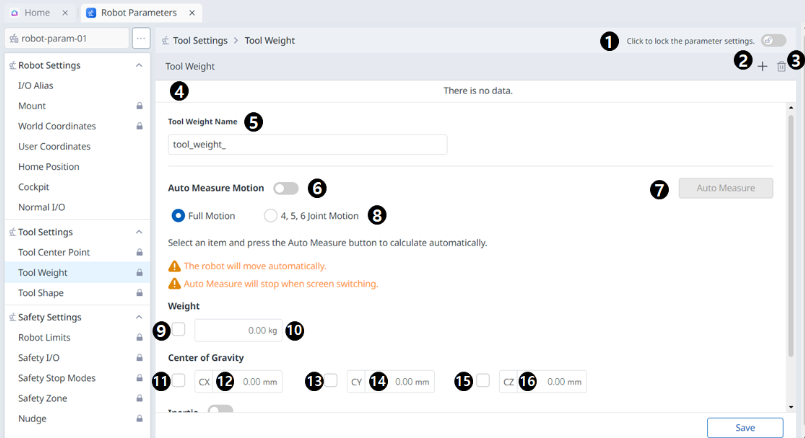
Puede establecer el peso de la herramienta montada en la brida agregando un peso de herramienta. El peso de la herramienta se puede establecer seleccionando Robot Parameters > Configuración de la herramienta > Peso de la herramienta.
El peso de la herramienta se puede medir usando la función de medición automática.
Se recomienda añadir peso de la herramienta para cada herramienta con una pieza de trabajo. Si el peso de la pieza es demasiado pesado, el robot puede reconocer el peso de la pieza como fuerza externa. Es porque el robot determina esta fuerza externa como una colisión y se detiene.
Al crear una tarea, cambie el peso de acuerdo con el proceso para cambiar el peso de la herramienta. Por ejemplo, es posible configurar una tarea para seleccionar el peso estándar de la herramienta antes de recoger una pieza de trabajo, y seleccionar el peso de la herramienta con la pieza de trabajo después de recoger una pieza de trabajo.
El elemento de peso de la herramienta activado se puede establecer como el peso de la herramienta estándar presionando el icono SET HERRAMIENT (![]() ) en la parte superior del colgante Teach.
) en la parte superior del colgante Teach.
El conjunto de la configuración de la herramienta es el mismo que el conjunto de otros comandos. Se puede usar el comando SET cuando se cambia el peso de la herramienta mientras se está realizando una tarea. Para obtener más información, consulte Módulo Editor de tareas.
Nota
Se pueden registrar hasta cincuenta pesos de herramientas diferentes.
En el caso de la serie M, la aceleración se ajusta automáticamente cuando el peso máximo de la herramienta supera el peso máximo de la herramienta.

Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Añadiendo | Este botón le permite agregar un nuevo Peso de la Herramienta. |
| 3 | Suprímase | Este botón le permite eliminar un Peso de Herramienta. |
| 4 | Lista de peso de la herramienta | Una lista de los pesos de la herramienta configurados. |
| 5 | Nombre de peso de la herramienta | Aquí es donde puede introducir un nombre para el Peso de la Herramienta. |
| 6 | Auto Medir movimiento | Este botón le permite ejecutar la medición automática. |
| 7 | Medición automática | Este botón le permite seleccionar una opción y ejecutar una medición automática para ella. |
| 8 | Selección de movimiento | Puede seleccionar el movimiento deseado de las opciones. |
| 9 | Selección del uso del peso | Usted puede elegir si utilizar el peso. Este cuadro de selección está deshabilitado para la serie E o la serie A sin sensores FPT. |
| 10 | Entrada de peso | Aquí es donde puedes ingresar el peso deseado. |
| 11 | Selección del uso del Centro de Gravedad CX | Se puede seleccionar el uso del centro de gravedad CX. |
| 12 | Entrada CX | CX puede ser ingresado. |
| 13 | Selección del uso del Centro de Gravedad CY | Se puede seleccionar el uso del centro de gravedad CY. |
| 14 | Entrada CY | CY puede ser ingresado. |
| 15 | Selección del uso del Centro de Gravedad CZ | Se puede seleccionar el uso del centro de gravedad CZ. |
| 16 | Entrada CZ | CZ puede ser ingresado. |
| 17 | Si utilizar la inercia | Esta casilla de verificación le permite elegir si desea utilizar la inercia. |
| 18 | Entrada lxx | Se puede ingresar una entrada lxx para la inercia. |
| 19 | Entrada lyy | Se puede ingresar una entrada lyy para la inercia. |
| 20 | Entrada lzz | Se puede ingresar una entrada lzz para la inercia. |
| 21 | Entrada lxy | Se puede ingresar una entrada lxy para la inercia. |
| 22 | Entrada lyz | Se puede ingresar una entrada lyz para la inercia. |
| 23 | Entrada lzx | Se puede ingresar una entrada lzx para la inercia. |
| 24 | Guardar | Este botón le permite guardar los valores de configuración. |
Forma de la herramienta
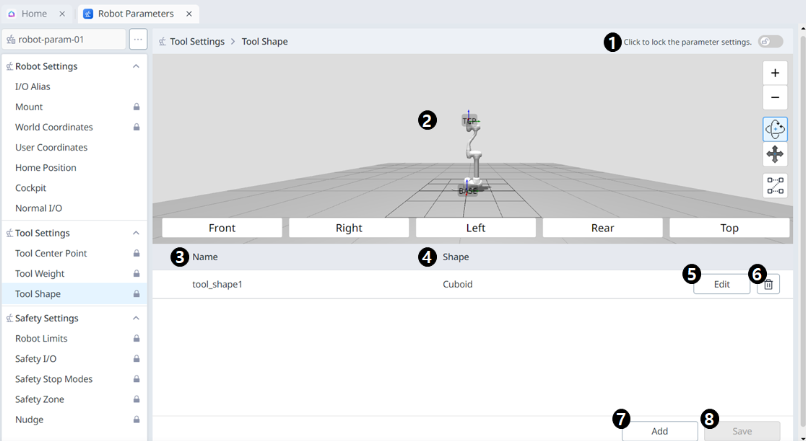
La forma de la herramienta instalada en la brida se puede ajustar añadiendo una forma de herramienta.
La forma de la herramienta se puede configurar en el módulo Parameters module > Configuración de la herramienta > Forma de la herramienta. Para obtener más información, consulte Forma de la herramienta.
El robot determina el estado de violación del límite de espacio basado en el TCP (Tool Center Point) del extremo del robot y el cuerpo del robot. Si el robot real tiene una forma de herramienta más grande que el TCP establecido, se debe agregar una forma de herramienta para proteger la pieza de trabajo y la herramienta.
Tenga precaución, ya que la zona que el robot puede maniobrar disminuirá si la forma de la herramienta se establece demasiado grande.
El elemento Forma de la herramienta solo está disponible después de que se haya registrado (confirmado) y el interruptor de palanca esté habilitado. El elemento de la forma de la herramienta activada se puede establecer como la forma de la herramienta estándar pulsando el icono de la herramienta SET (![]() ) en la parte superior del colgante de la enseñanza.
) en la parte superior del colgante de la enseñanza.
El conjunto de la configuración de la herramienta es el mismo que el conjunto de otros comandos. Se puede usar el comando SET cuando se cambia la forma de la herramienta mientras se está realizando una tarea. Para obtener más información, consulte Módulo Editor de tareas.
Nota
Se pueden registrar hasta cincuenta formas de herramientas diferentes.
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | 3D Simulation | Aquí es donde puede simular en 3D el resultado de la forma de la herramienta configurada. |
| 3 | Nombre de la forma de la herramienta | El nombre de la herramienta configurada. |
| 4 | Forma de la herramienta | La forma de la herramienta configurada. |
| 5 | Forma de la herramienta de edición | Este botón le permite editar la forma de la herramienta configurada. |
| 6 | Eliminación de forma de herramienta | Este botón le permite eliminar la forma de herramienta seleccionada. |
| 7 | Añadir forma de herramienta | Se puede añadir una forma de herramienta. |
| 8 | Solicitud | Este botón le permite aplicar la forma de la herramienta después de configurarla. |
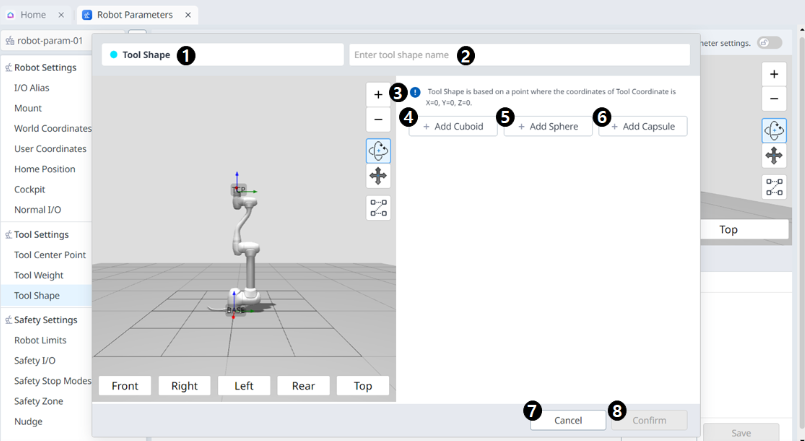
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Forma de la herramienta | Esto indica que este panel es un pop-up de forma de herramienta. |
| 2 | Ingresar un nombre | Este es un campo donde se puede introducir el nombre de la forma de la herramienta. |
| 3 | Mensaje de precaución | Una nota de precaución al configurar |
| 4 | Añadir nuevo cuboid | Este botón le permite agregar un cuboide. |
| 5 | Añadir nueva esfera | Este botón le permite agregar un Esfera. |
| 6 | Añadir nueva cápsula | Este botón le permite agregar una cápsula. |
| 7 | Cancelar | Este botón le permite cancelar la configuración. |
| 8 | Confirme | Este botón le permite confirmar la configuración. |
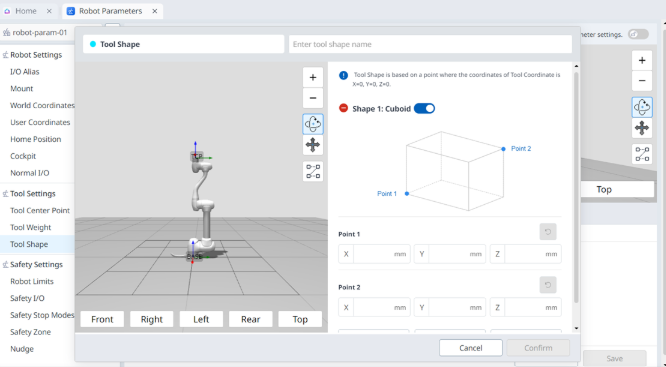
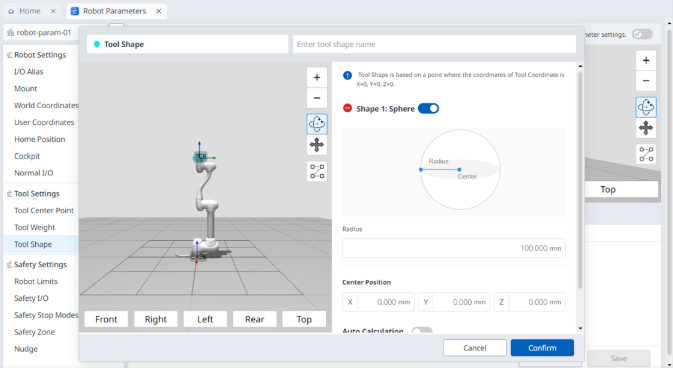
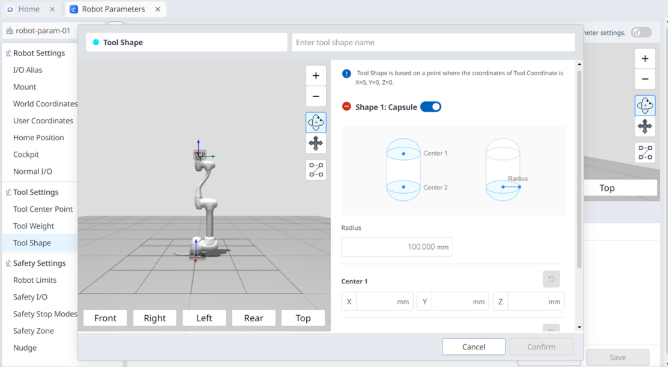
Una vez que se agrega el cubo/esfera/cápsula, la pantalla se ve como abajo.
 |  |
 |