
Módulo JOG Plus
El usuario puede seleccionar un método de movimiento manual desde la pestaña Jog.
Jog: Mueve la articulación del robot o TCP al eje de articulación o eje de coordenadas seleccionado por el usuario
Move: Mueve la junta del robot o TCP al punto de destino que el usuario introdujo
El movimiento del robot consta de dos tipos.
Moción conjunta: Mueve cada articulación linealmente con un movimiento de rotación
Movimiento de tarea: Mueve el final linealmente al punto objetivo
El siguiente es el método de cómo mover el robot usando el movimiento de la articulación desde la pantalla de jog:
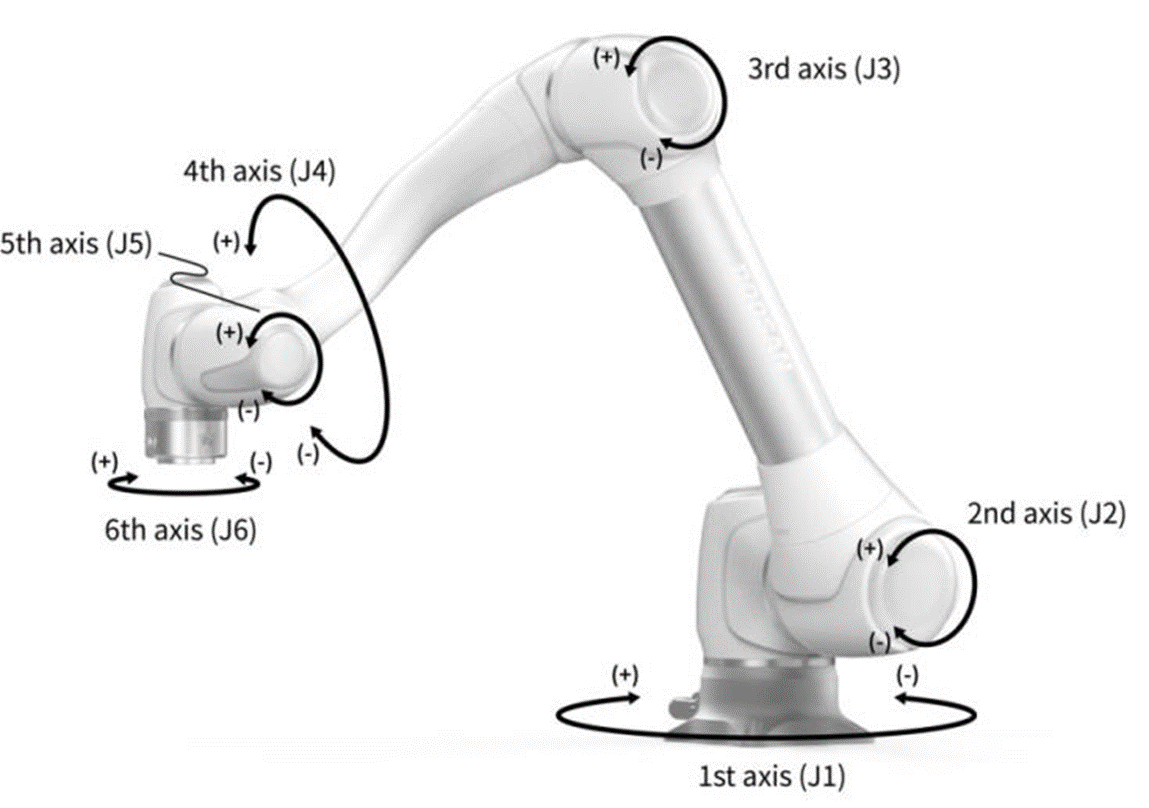
Seleccione la pestaña Joint.
Seleccione el eje a mover. Por ejemplo, puede seleccionar J1.
Pulse el botón +/- para mover el robot. El robot se mueve mientras se pulsa el botón +/- y la ubicación actual se muestra en la pantalla en tiempo real.
El siguiente es el método de cómo mover el robot usando el movimiento de la tarea en la pantalla de jog:
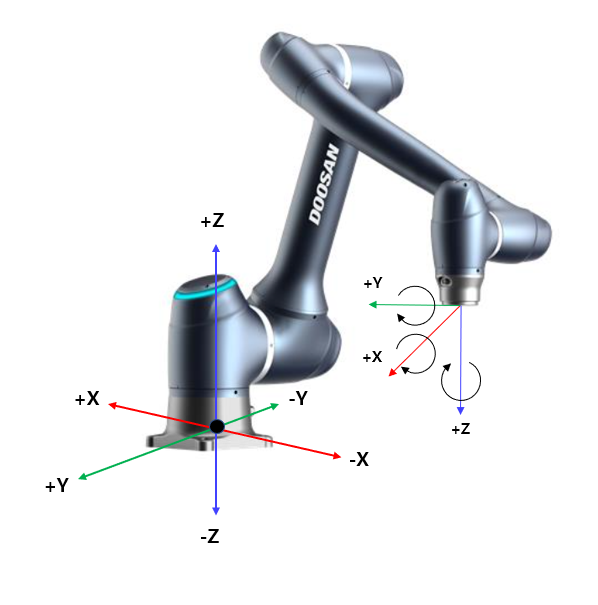
Seleccione las coordenadas base. El robot se puede mover de acuerdo con las coordenadas BASE o las coordenadas DE LA HERRAMIENTA.
Seleccione la dirección a mover. Por ejemplo, se puede seleccionar el eje X.
Pulse el botón +/- para mover el robot. El robot se mueve mientras se pulsa el botón +/- y la ubicación actual se muestra en la pantalla en tiempo real.
Para obtener más información sobre el movimiento de jog, mover y alinear, consulte Panel de Jog, y Panel de Movimiento respectivamente.
Nota
Si el interruptor de alternancia del modo real en la parte superior izquierda de la pantalla Jog está desactivado, el robot se mueve solo en la pantalla virtual a la izquierda de la pantalla Jog. El robot real se mueve si el interruptor de cambio de modo real está activado.
Con el módulo Jog Plus, el usuario puede explorar todo el espacio de trabajo en modo manual o configurar el espacio de operación como el espacio de operación del robot. El ángulo de movimiento de cada eje se puede limitar según el espacio de operación seleccionado y el límite del ángulo de unión del ajuste de seguridad.
Para usar la función Jog Plus, pulse el módulo Jog Plus en el menú principal.
La función Jog no se puede utilizar durante el Servo Off.
El robot se opera manualmente en la pantalla Jog Plus, por lo que el robot solo se mueve cuando se presiona el botón Jog.
Es posible mover el robot en función de la posición actual en la pantalla de pestañas Jog Plus.
El robot se puede mover configurando el ángulo/coordenadas objetivo en la pantalla de la pestaña Mover.
Es posible configurar las coordenadas de referencia en la pantalla de pestañas Jog Plus y mover la pantalla de pestañas como una unión o tarea.
Nota
Si el robot no se puede navegar debido a que está ubicado en un espacio que no sea el espacio de operación del modo Jog Plus, establezca el espacio de operación del robot en “Ninguno” para permitir que el robot sea navegado.
Nota
Este módulo no está disponible en modo Auto. Pulsando el botón de alternancia en la parte inferior derecha lo hace disponible en modo Manual.
El uso de Job Plus (Jog+) le permite utilizar la función jog simultáneamente mientras realiza diferentes trabajos. Esto se puede utilizar cuando se requiere control manual para mover el robot al punto objetivo durante la enseñanza.