
Panel de Jog
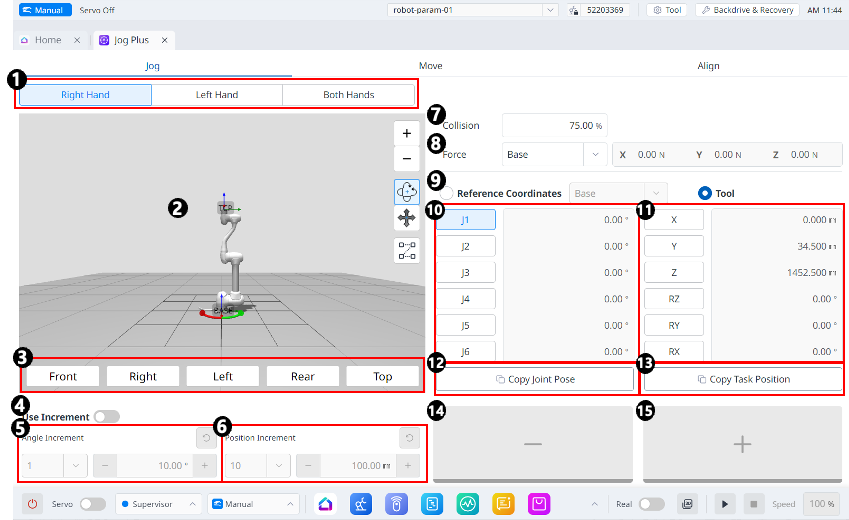
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Seleccione el tipo de panel | Puede elegir la ubicación del botón Mover. |
| 2 | 3D Simulation | Este es el visor 3D, donde se puede ver cómo se ve el robot. |
| 3 | Alineación del simulador | Puede utilizar esta sección para dirigir el simulador. |
| 4 | Utilizar el incremento | Este botón le permite habilitar incrementos de ángulo o posición. |
| 5 | Incremento del ángulo | Esta sección es donde se establece el incremento de ángulo en el eje seleccionado. |
| 6 | Incremento de posición | Esta sección es donde se establece el incremento de posición en el eje seleccionado. |
| 7 | Colisión | Este campo es donde estableces la colisión de robots. |
| 8 | Vigilancia de la Fuerza | En esta sección se establecen las fuerzas en los ejes X, Y y Z basados en Base, Herramienta, Mundo, Referencia y entre otros. |
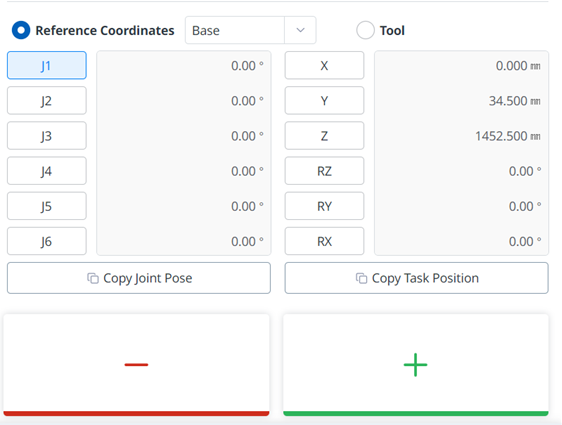
| 9 | Seleccione el sistema de coordenadas de referencia | Seleccione el sistema de coordenadas de referencia que se utilizará para las coordenadas de tarea en la Figura 11. Puedes elegir Coordenadas Base, Mundo o Usuario. |
| 10 | Grupo mixto | Puede seleccionar el eje conjunto para jog. |
| 11 | Panel de tareas | Puede seleccionar el eje de tareas para jog. |
| 12 | Copiar Pose J botón | Este botón le permite copiar Pose J. |
| 13 | Copiar Pose X botón | Este botón le permite copiar Pose X. |
| 14 | Mover - botón | Puede hacer que el robot se mueva en la dirección - basada en cada eje. En este momento, puede averiguar la dirección del - y + en la simulación 3D en el lado izquierdo. |
| 15 | Mover + botón | Puede hacer que el robot se mueva en la dirección + basado en cada eje. En este momento, puede averiguar la dirección del - y + en la simulación 3D en el lado izquierdo. |
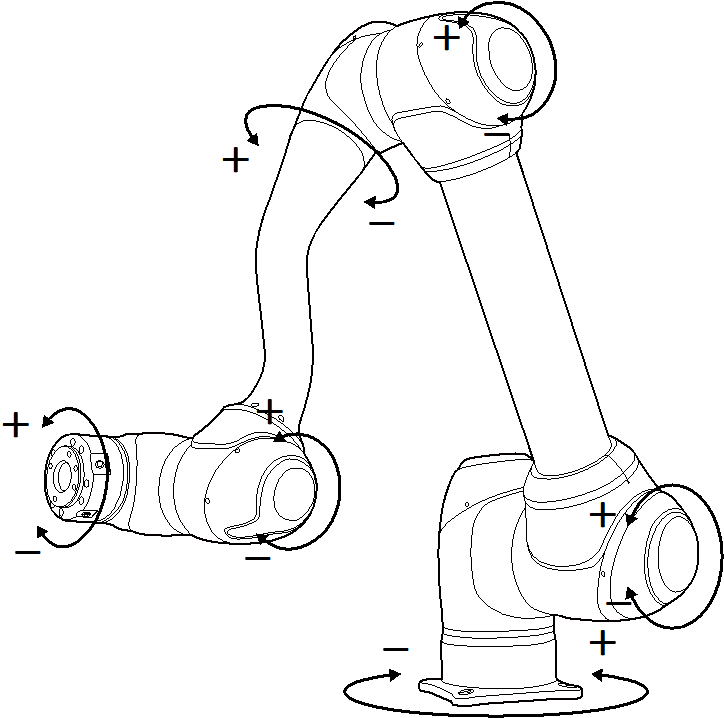
Ejecutar basado en Robot Joint
Para ajustar el ángulo basado en la articulación del robot, siga estos pasos:
Seleccione el eje (J1-J6) para ajustar el ángulo en el panel de articulación.
Mantenga pulsados los botones de dirección (
 ,
,  ) para ajustar el ángulo del eje correspondiente.
) para ajustar el ángulo del eje correspondiente.
Ejecución basada en Robot Base

Para mover el robot en función de sus coordenadas base, siga estos pasos:
Seleccione la Base como sistema de coordenadas de referencia.
En el panel de tareas, seleccione el eje (X~RX) para el que desea ajustar el ángulo.
Mantenga presionado el botón Dirección (+,-) para mover el eje correspondiente.
Ejecución basada en las coordenadas mundiales

Para mover el robot basado en las coordenadas mundiales, siga estos pasos:
Seleccione el Mundo como sistema de coordenadas de referencia.
En el panel de tareas, seleccione el eje (X~RX) para el que desea ajustar el ángulo.
Mantenga presionado el botón Dirección (+,-) para mover el eje correspondiente.
Ejecución basada en Robot Tool

Para mover el robot basado en la herramienta del robot, siga estos pasos:
Seleccione la herramienta como sistema de coordenadas de referencia.
En el panel de tareas, seleccione el eje (X~RX) para el que desea ajustar el ángulo.
Mantenga presionado el botón Dirección (+,-) para mover el eje correspondiente.

Nota
El área de seguridad no se aplica en modo virtual.
RX, Ry y RZ se ejecutan según TCP (posición del centro de la herramienta).