
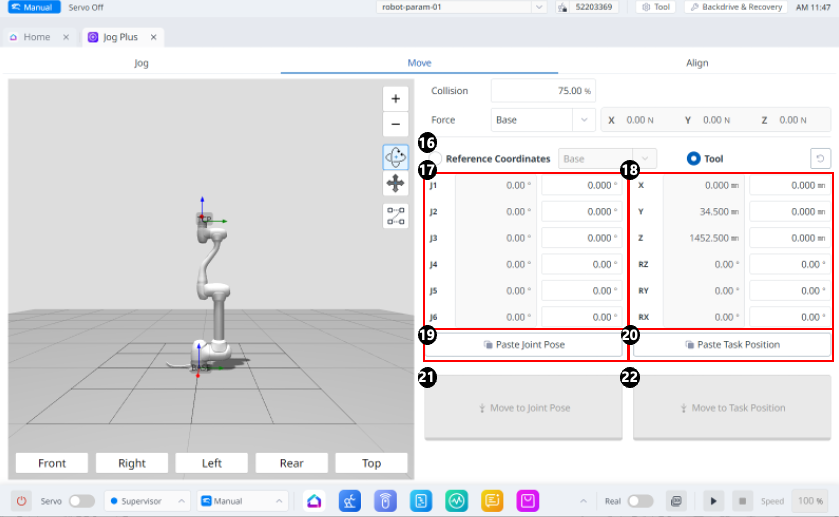
Panel de Movimiento
Menú
Temas | Descripción | |
|---|---|---|
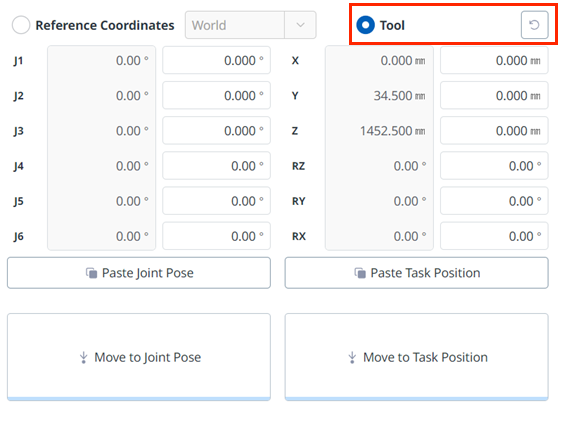
16 | Seleccione el sistema de coordenadas de referencia | Seleccione el sistema de coordenadas de referencia que se utilizará para las coordenadas de tarea en la Figura 18. Puedes elegir Coordenadas Base, Mundo o Usuario. |
17 | Postura articular | Muestra la postura actual del robot y la postura de la articulación objetivo. |
18 | Postura de tarea | Muestra la postura actual del robot y la postura de la tarea objetivo que se ajustan al sistema de coordenadas de referencia seleccionado. |
19 | Pegar la postura de la articulación | Pegue el valor de postura copiado en el portapapeles en el panel de postura conjunta. |
20 | Pegar la postura de tarea | Pegue el valor de postura copiado en el portapapeles en el panel de postura de tarea. |
21 | Botón de movimiento conjunto | Este botón hace que el robot se mueva a la postura de la articulación objetivo. |
22 | Botón de movimiento de tarea | Este botón hace que el robot se mueva a la postura de la tarea objetivo. |
Ajuste de ángulo para moverse
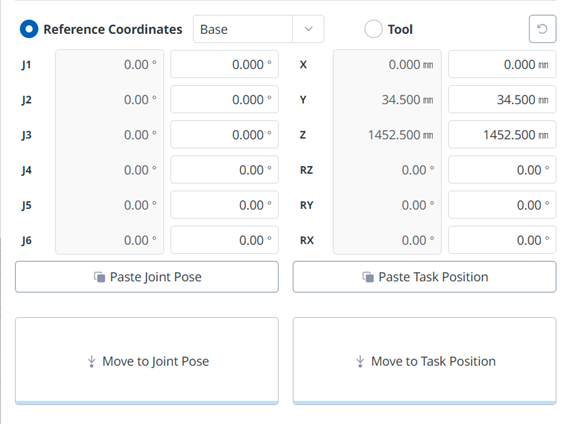
Para mover el robot en un ángulo específico, siga estos pasos:
Seleccione la pestaña Move.
Introduzca el ángulo objetivo de la junta del robot. (J4 está deshabilitado para los modelos de la serie P)
Habilite el modo real.
Pulse y mantenga presionado el botón Mover to Joint Pose correspondiente para ajustar el ángulo de articulación del robot.
Establecer las coordenadas de referencia base para mover
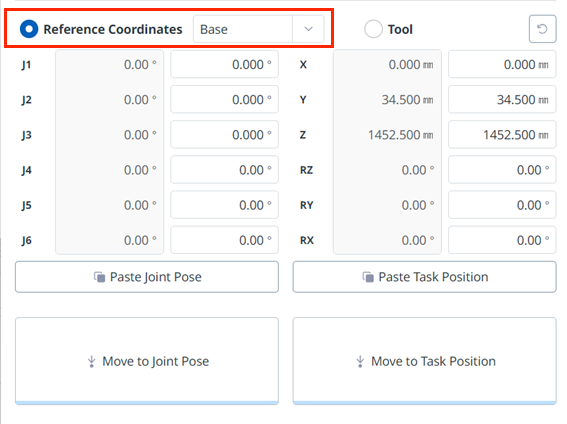
Para mover el robot en función de sus coordenadas base, siga estos pasos:
Seleccione la pestaña Move y Coordenadas de referencia.
Seleccione la coordenada de visualización como base.
Pulse y mantenga presionado el botón Mover to Task Pose correspondiente para moverse a las coordenadas establecidas.
Establecer las coordenadas del mundo Coordenadas de referencia para moverse
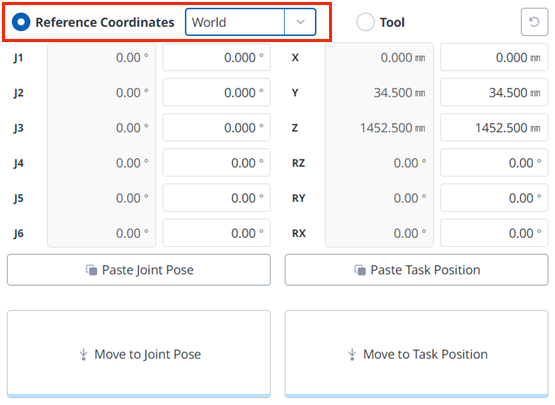
Para mover el robot basado en las coordenadas mundiales, siga estos pasos:
Seleccione la pestaña Move y Coordenadas de referencia.
Seleccione Mundo como coordenadas de visualización y seleccione la pestaña Mundo.
Configure la pose para moverse con referencia a las coordenadas del mundo.
Pulse y mantenga presionado el botón Mover to Task Pose correspondiente para moverse a las coordenadas establecidas.
Configuración de coordenadas para moverse en función de la herramienta
Para mover el robot en función de las coordenadas de la herramienta, siga estos pasos:
Seleccione la pestaña Move y seleccione la pestaña Herramienta.
Configure la pose para moverse con referencia a la herramienta.
Pulse y mantenga presionado el botón Mover to Task Pose correspondiente para moverse a las coordenadas establecidas.