
Pruebe forzar muestras de comandos
Precaución
Antes de probar la muestra, asegúrese de leer y seguir Precauciones. Para obtener más información, consulte la PARTE 1. Manual de seguridad.
Nota
Este ejemplo requiere el archivo Task Writer creado en Pruebe ejemplos de comandos de cumplimiento.
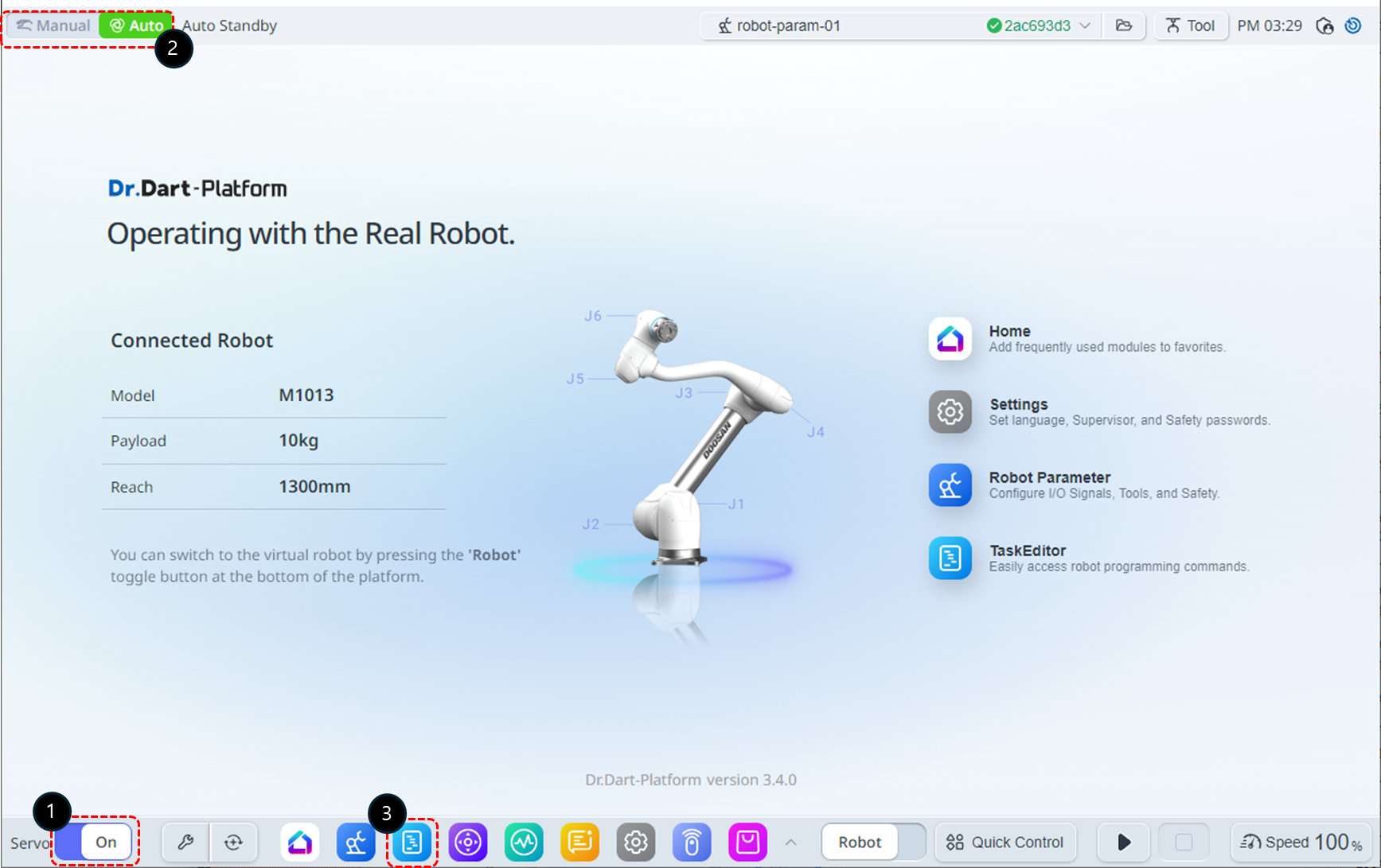
Cambia el estado Servo a ON.
Cambie el modo de operación a Manual.
Seleccione el módulo Editor de tareas en el menú inferior.
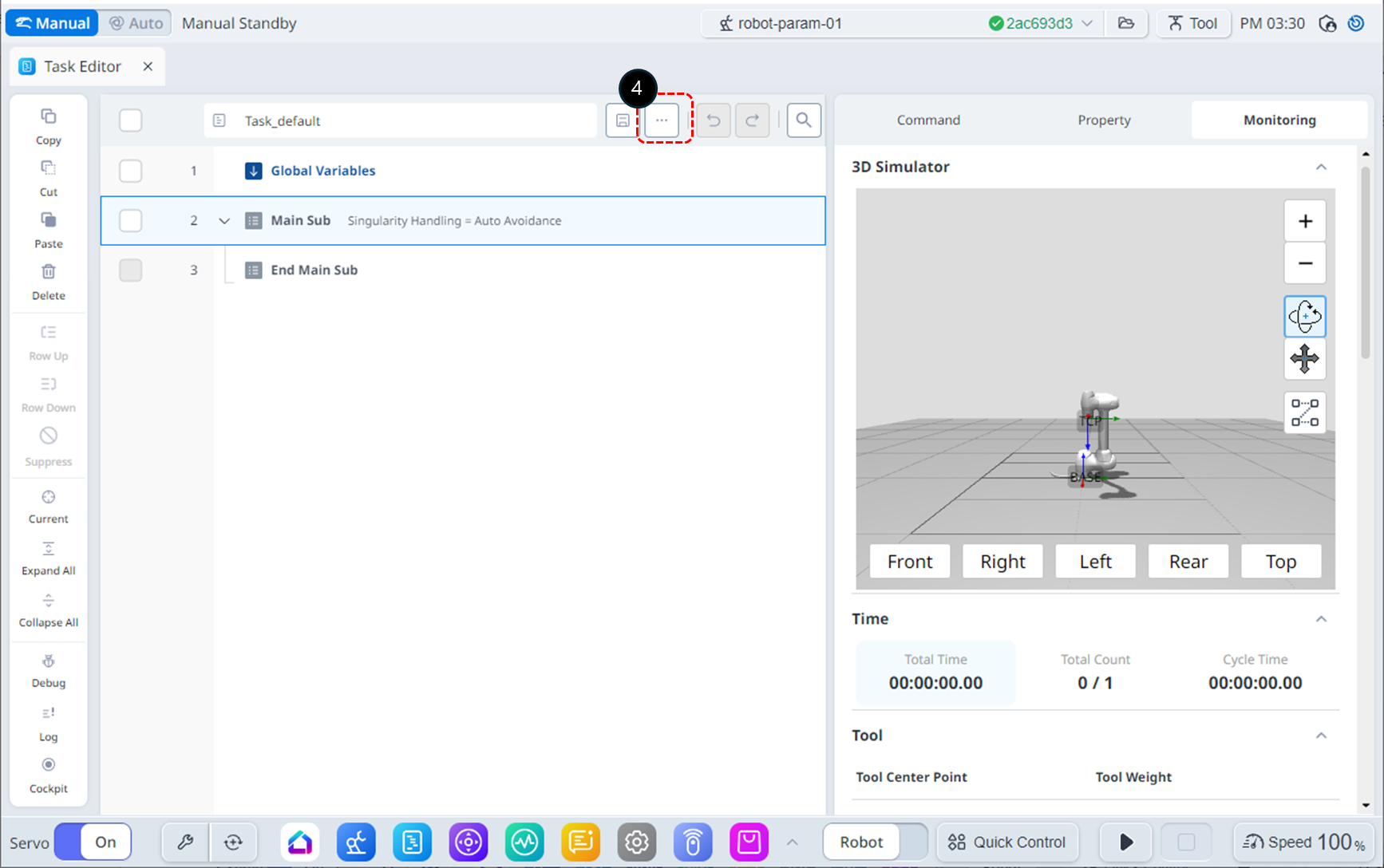
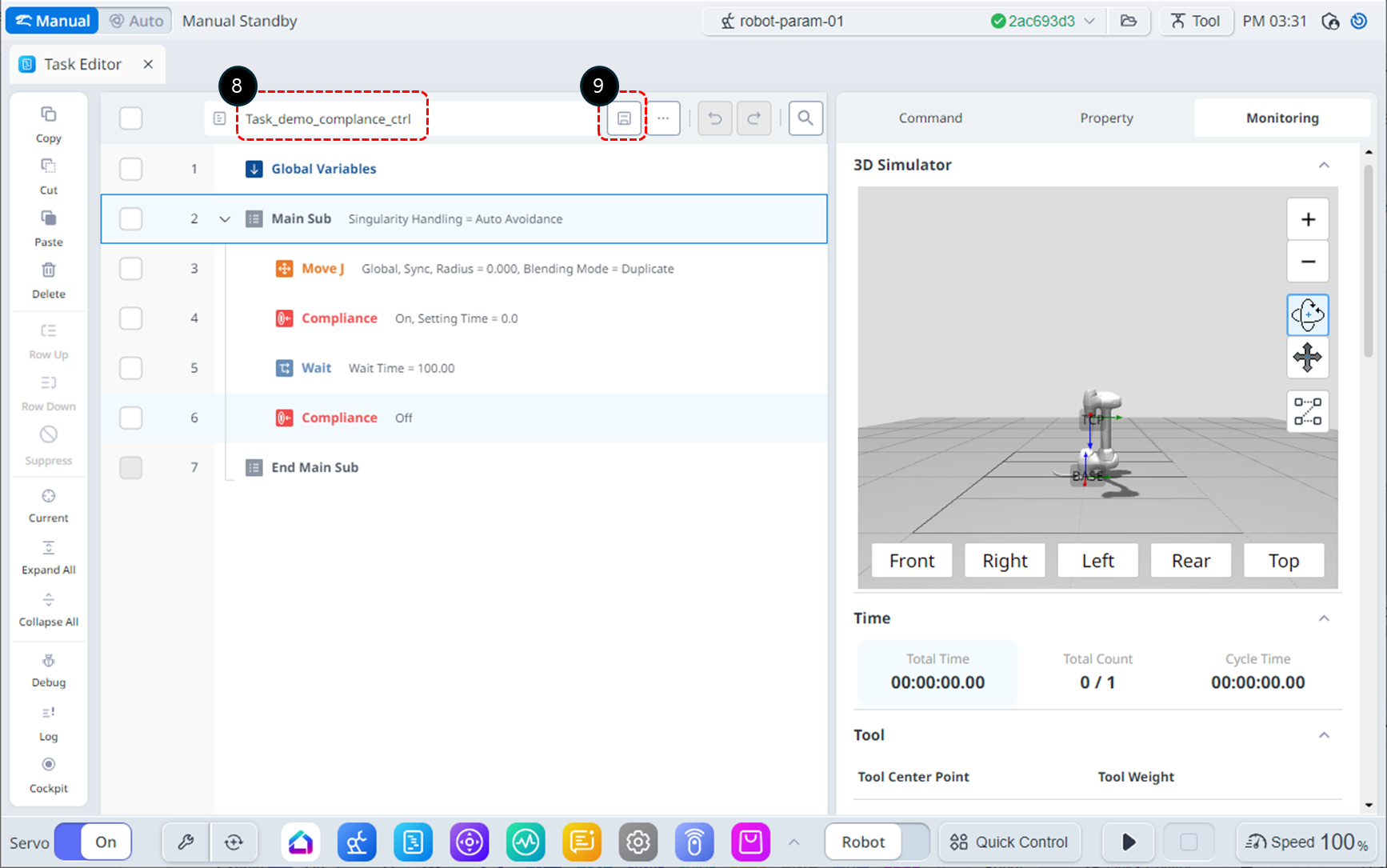
Haga clic en el botón Archivo.
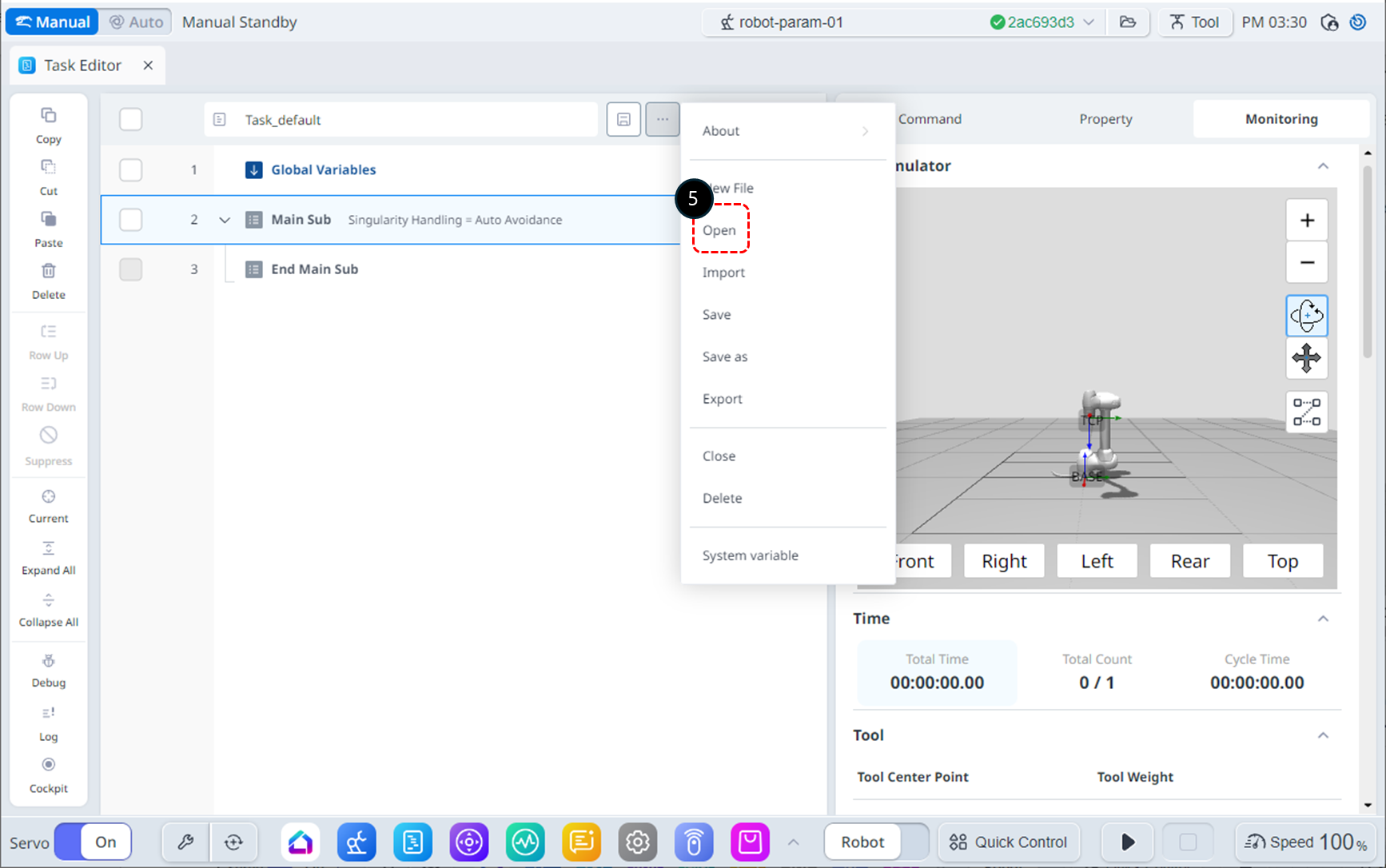
Haga clic en el botón Abrir.
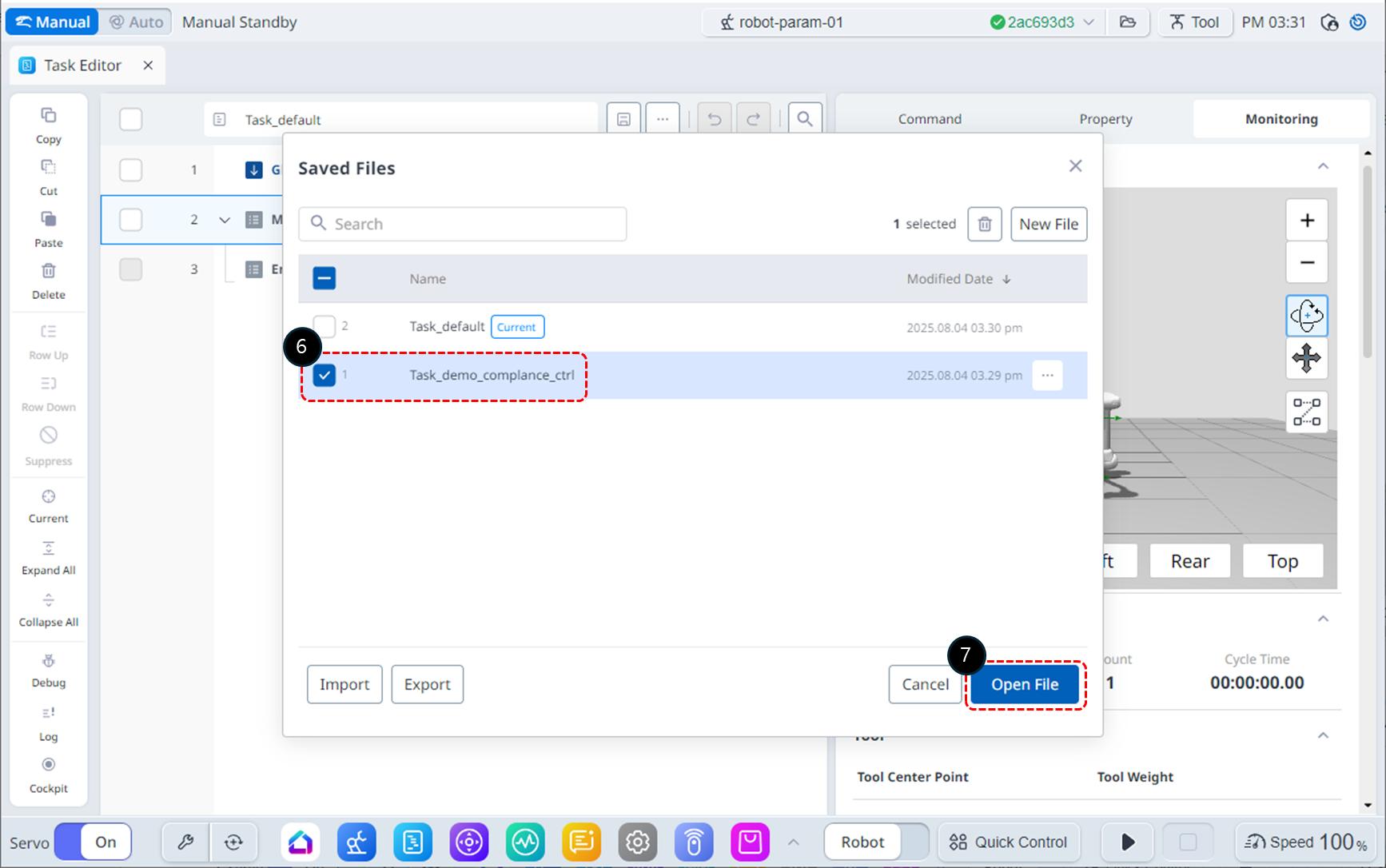
Seleccione el archivo Task_demo_compliance_ctrl creado en Pruebe ejemplos de comandos de cumplimiento.
Haga clic en el botón Abrir archivo.
Cambie el nombre del archivo a Task_demo_force_ctrl.
Haga clic en el botón Guardar para guardar el nombre del archivo.
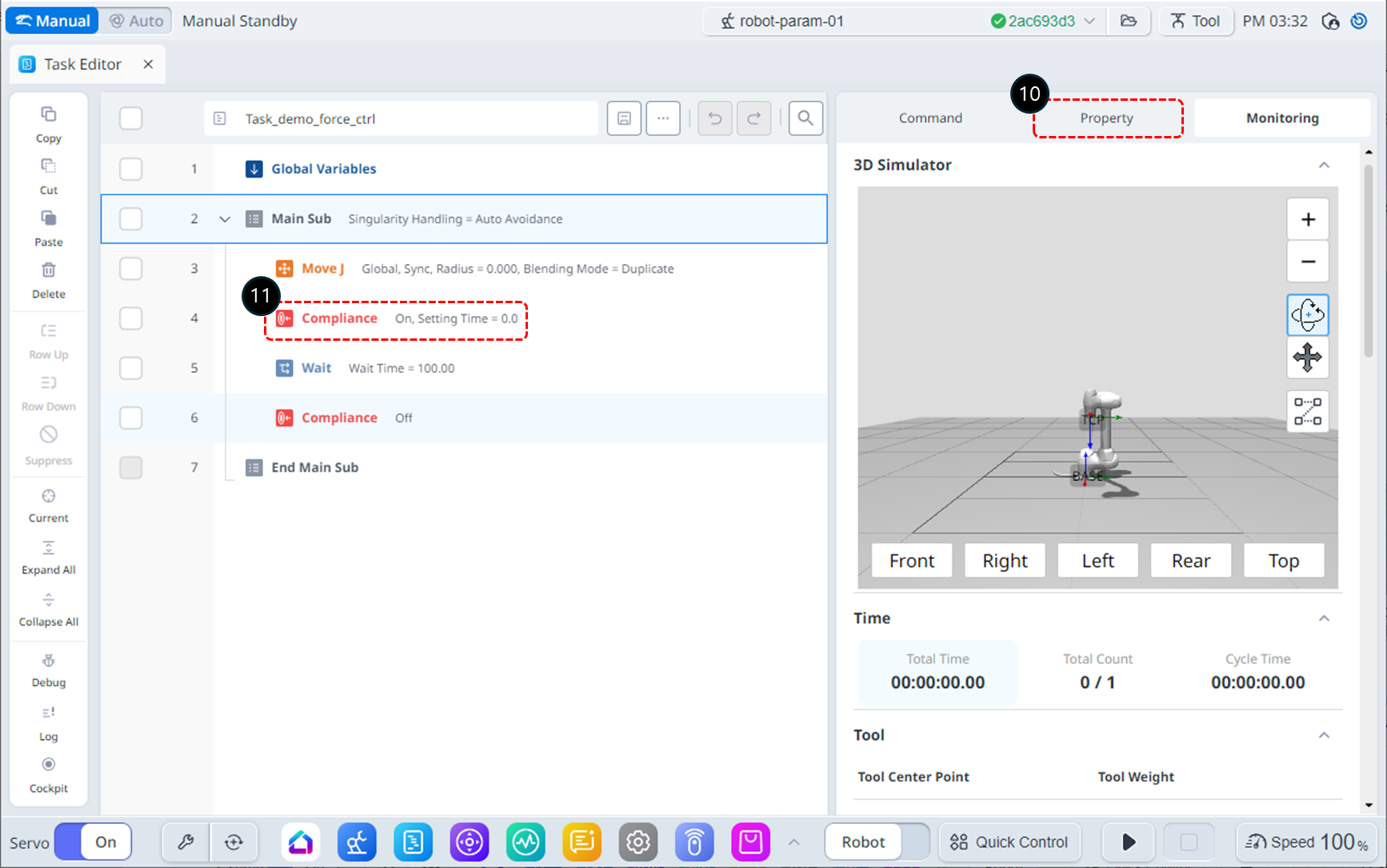
Seleccione la pestaña Propiedad.
Elija el comando Compliance en la cuarta línea.
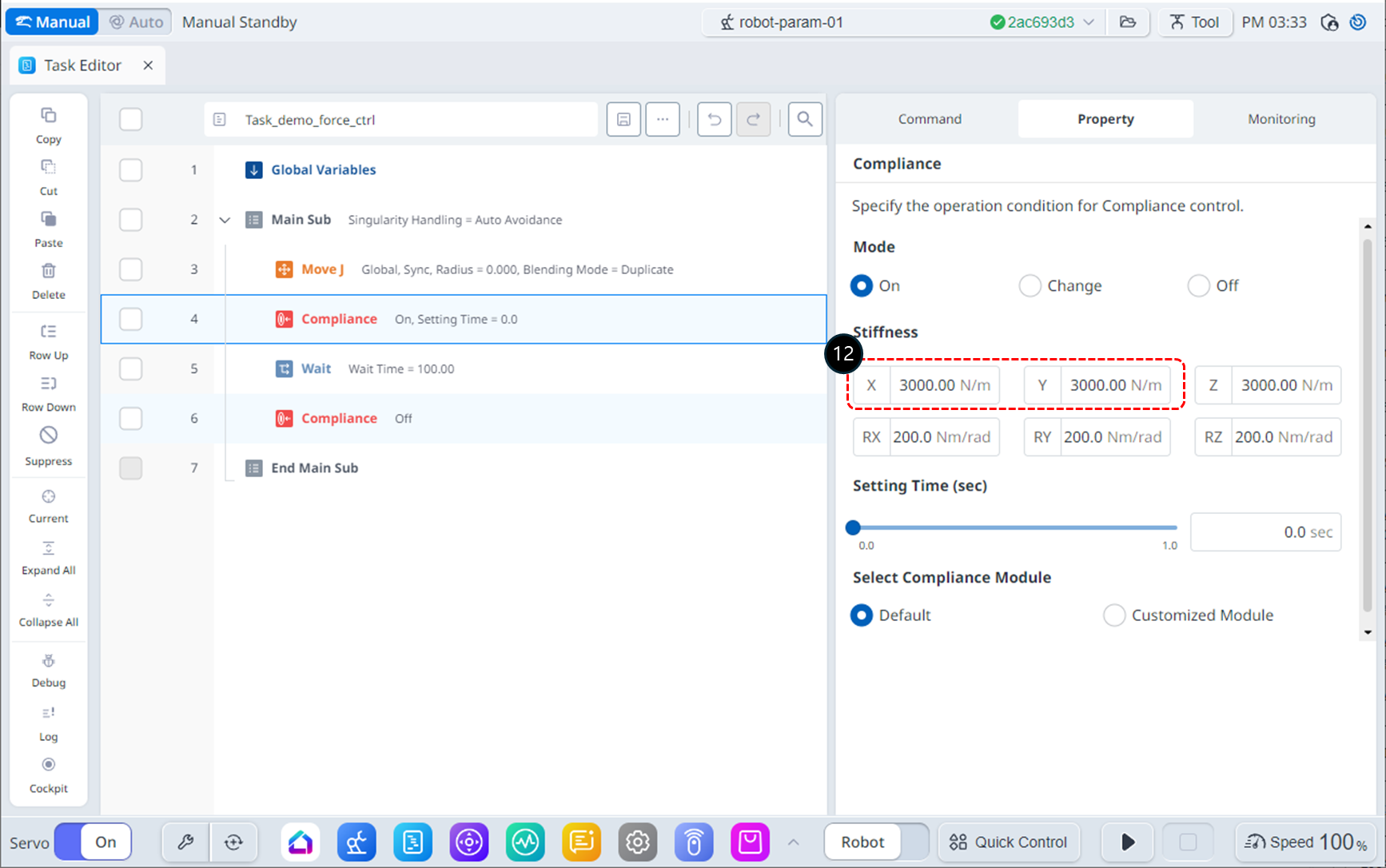
Establezca la rigidez a sus valores predeterminados de la siguiente manera.
X, Y, Z : 3000 N/m (por defecto)
Rx, Ry, Rz : 200 Nm/rad (por defecto)
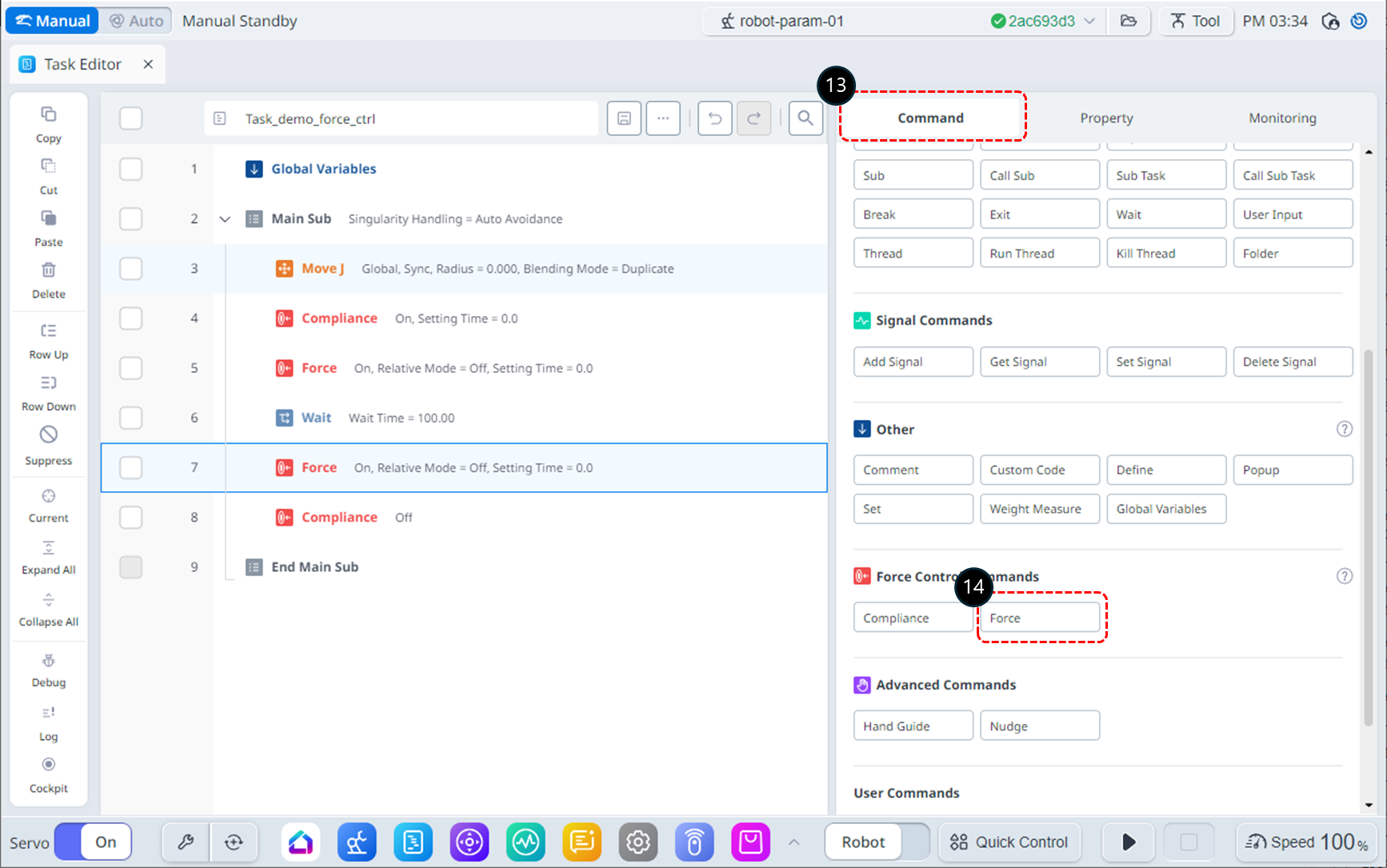
Seleccione la pestaña Comando.
Añade un comando Fuerza a las líneas 5 y 7. Estos comandos se utilizarán para activar y desactivar el Control de Fuerza.
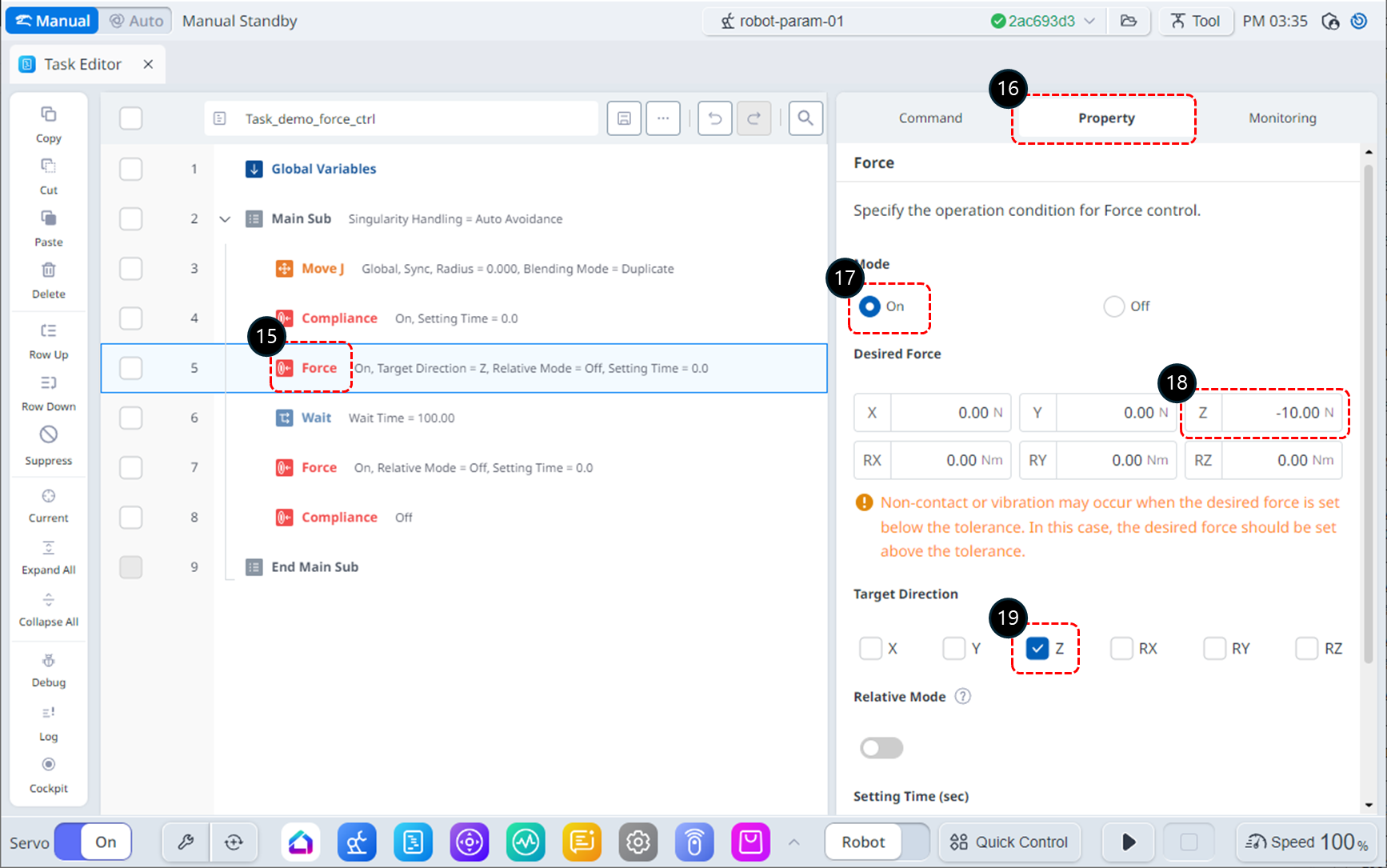
Seleccione el comando Fuerza en la quinta línea.
Vaya a la pestaña Propiedad.
Establezca el modo de la siguiente manera: Mode ON activa el control de fuerza.
Modo: Adelante
Establezca la fuerza deseada de la siguiente manera.
X : 0 N (por defecto)
Y : 0 N (por defecto)
Z: -10 N
Rx, Ry, Rz : 0 Nm/rad (por defecto)
En la dirección objetivo, compruebe solo el eje z.
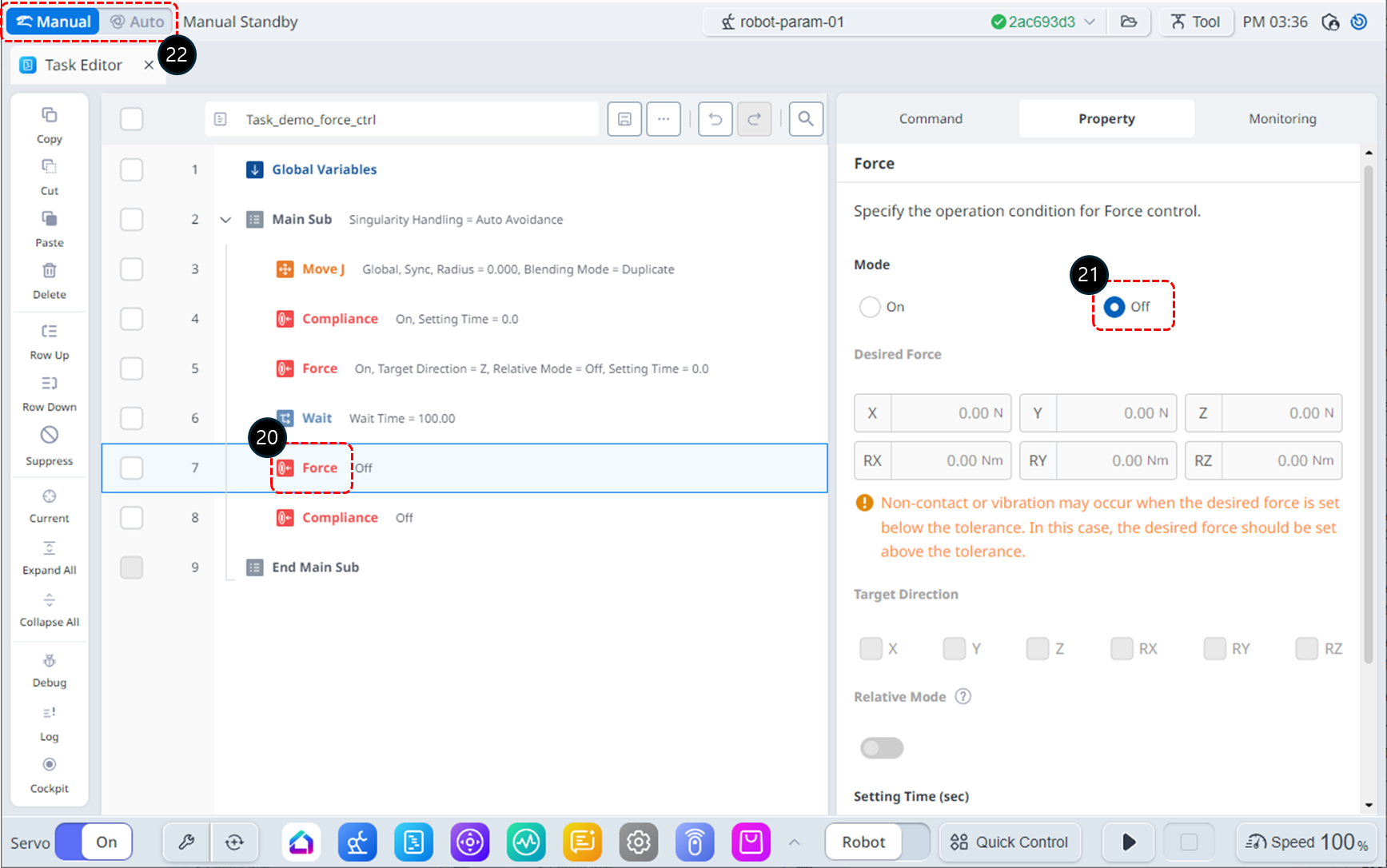
En la lista de tareas, seleccione el comando Forzar en la línea 7.
Establezca el modo de la siguiente manera: Mode Off desactiva el control de fuerza.
Modo: Apagado
Cambie el modo de operación a Auto. La pestaña Propiedad cambiará automáticamente a la pestaña Monitoreo.
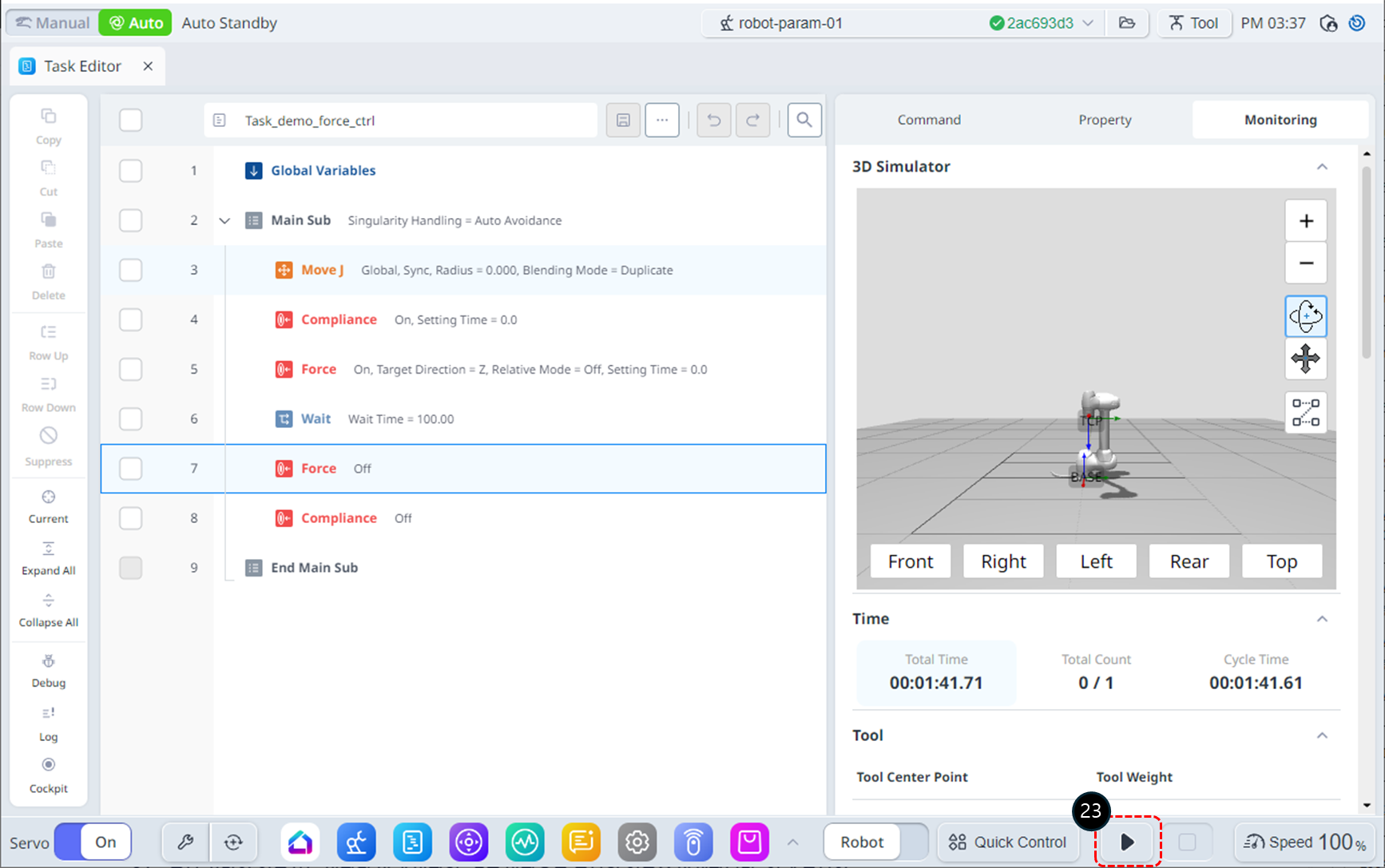
Haga clic en el botón Ejecutar. En el estado de espera, el robot funciona de la siguiente manera:
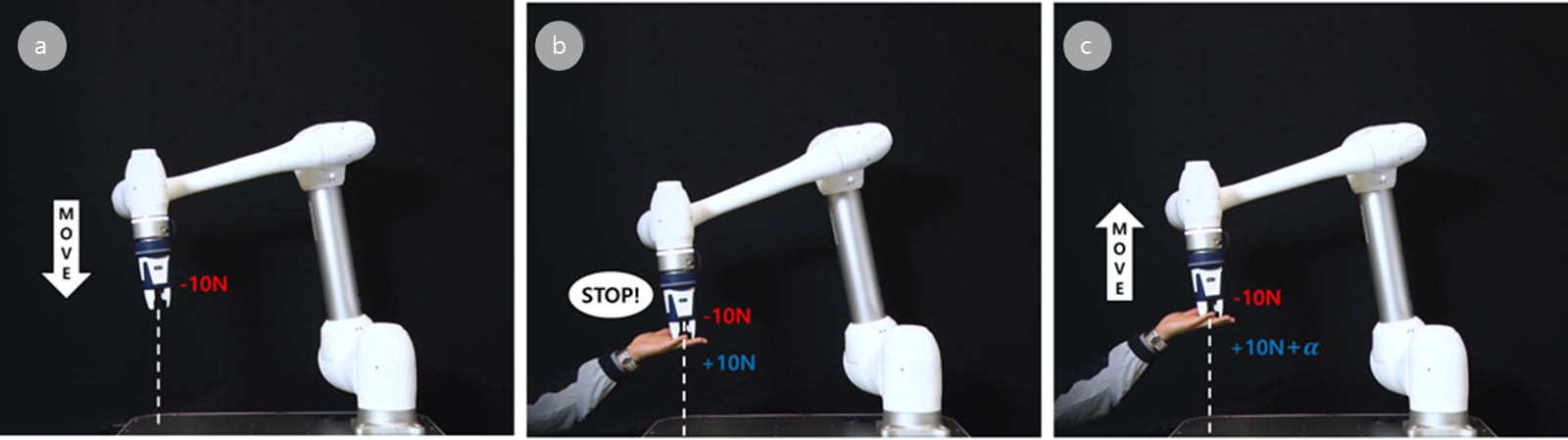
Se aplica una fuerza de -10N en el efector final del robot, causando que el robot se mueva lentamente en la dirección -Z.
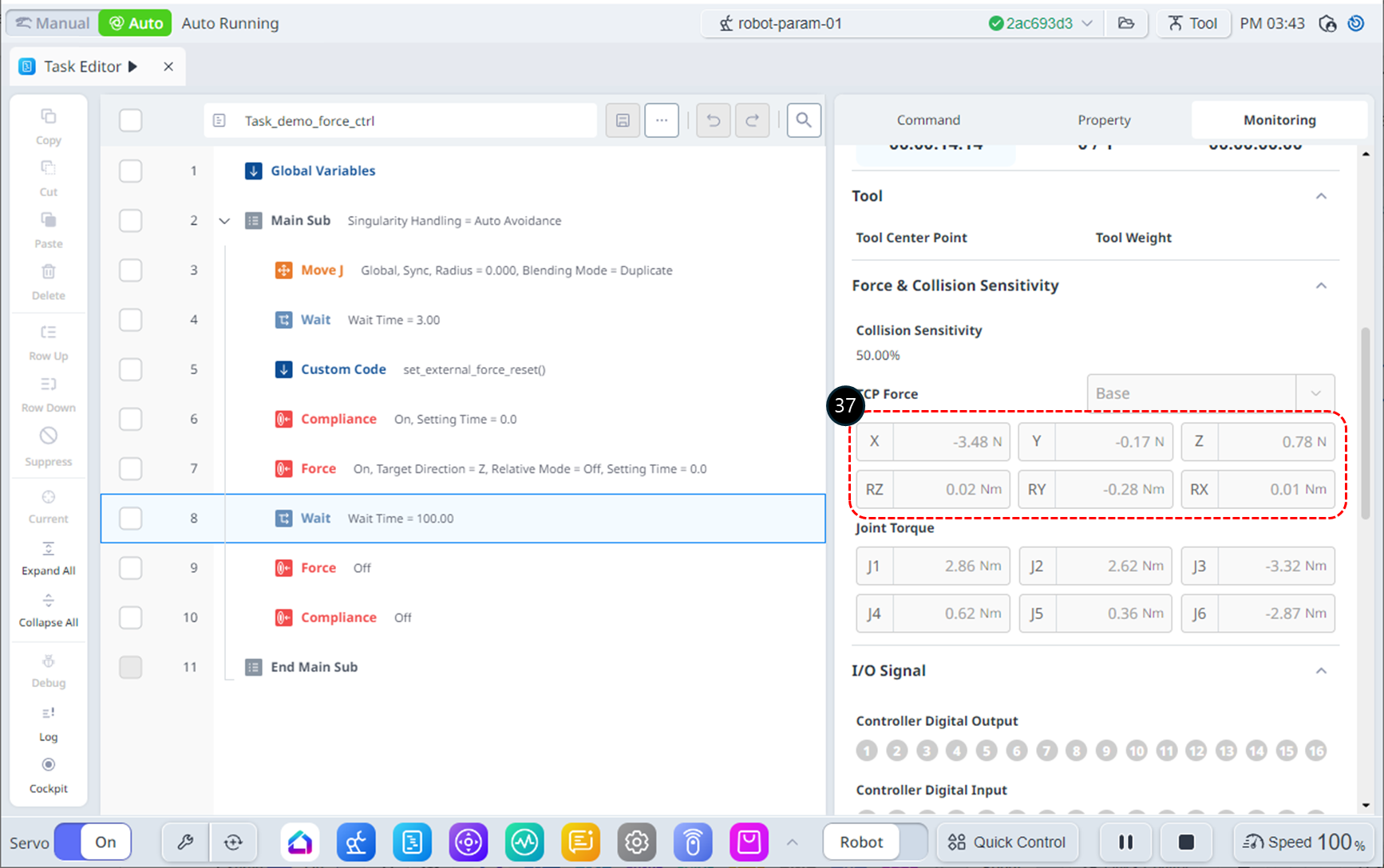
Aplique una fuerza contraria en la dirección +Z, oponiéndose al movimiento del robot. Cuando la fuerza aplicada por el robot y la fuerza opuesta están equilibradas, el robot parecerá mantener su posición como si estuviera estacionario.
Si se aplica una fuerza mayor que +10N al robot, se moverá en la dirección de la fuerza aplicada.
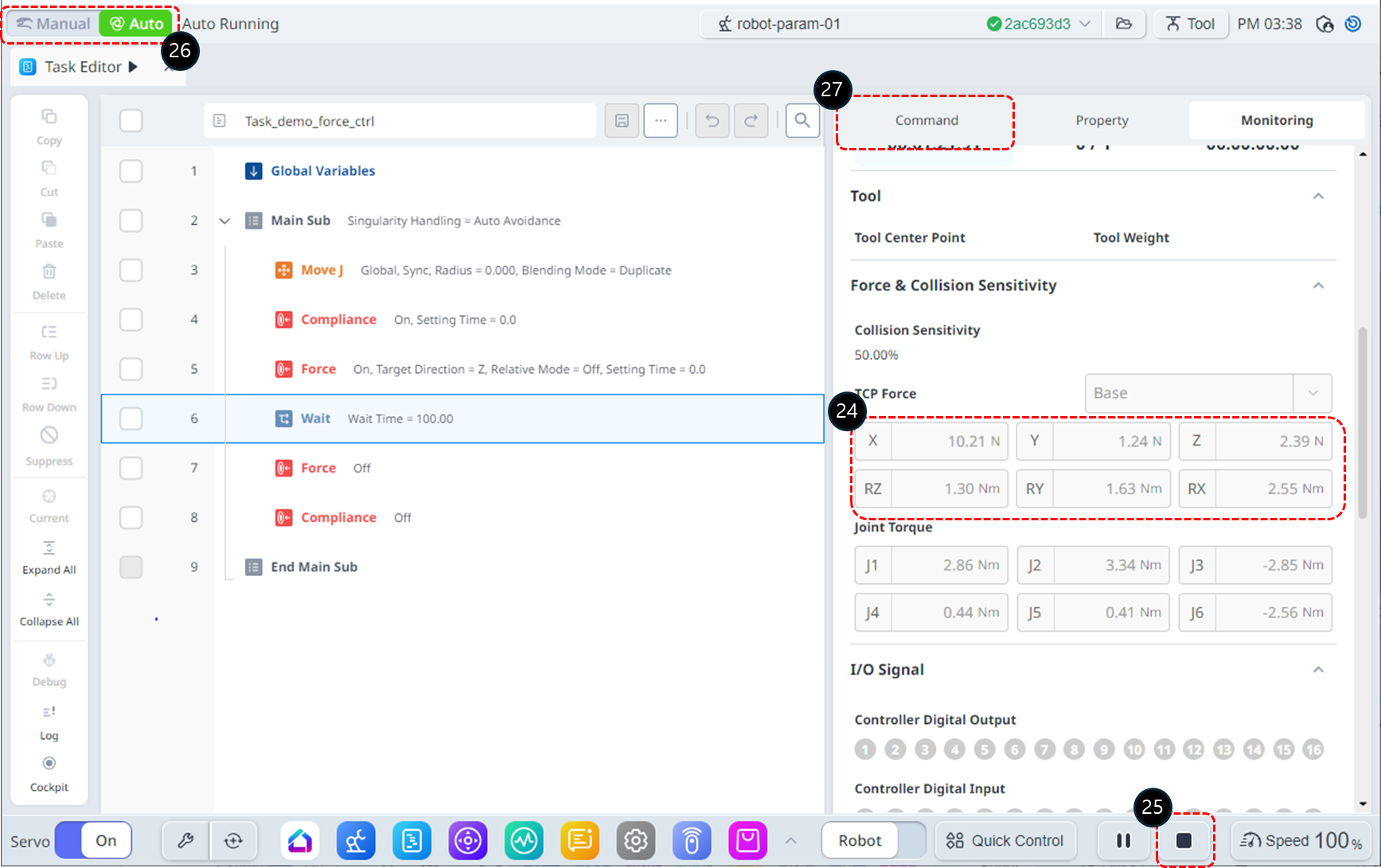
Durante el funcionamiento, puede monitorear la Fuerza TCP en tiempo real en la sección Fuerza TCP de la pestaña Monitoreo. Si no se aplica ninguna fuerza al efector final del robot, los valores de fuerza TCP deben ser 0, pero puede notar que se muestran componentes de error. A continuación hay una explicación adicional para abordar este problema.
Haga clic en el botón Detener para terminar la tarea.
Cambie el modo de operación a Manual para la modificación de tareas.
Seleccione la pestaña Comando.
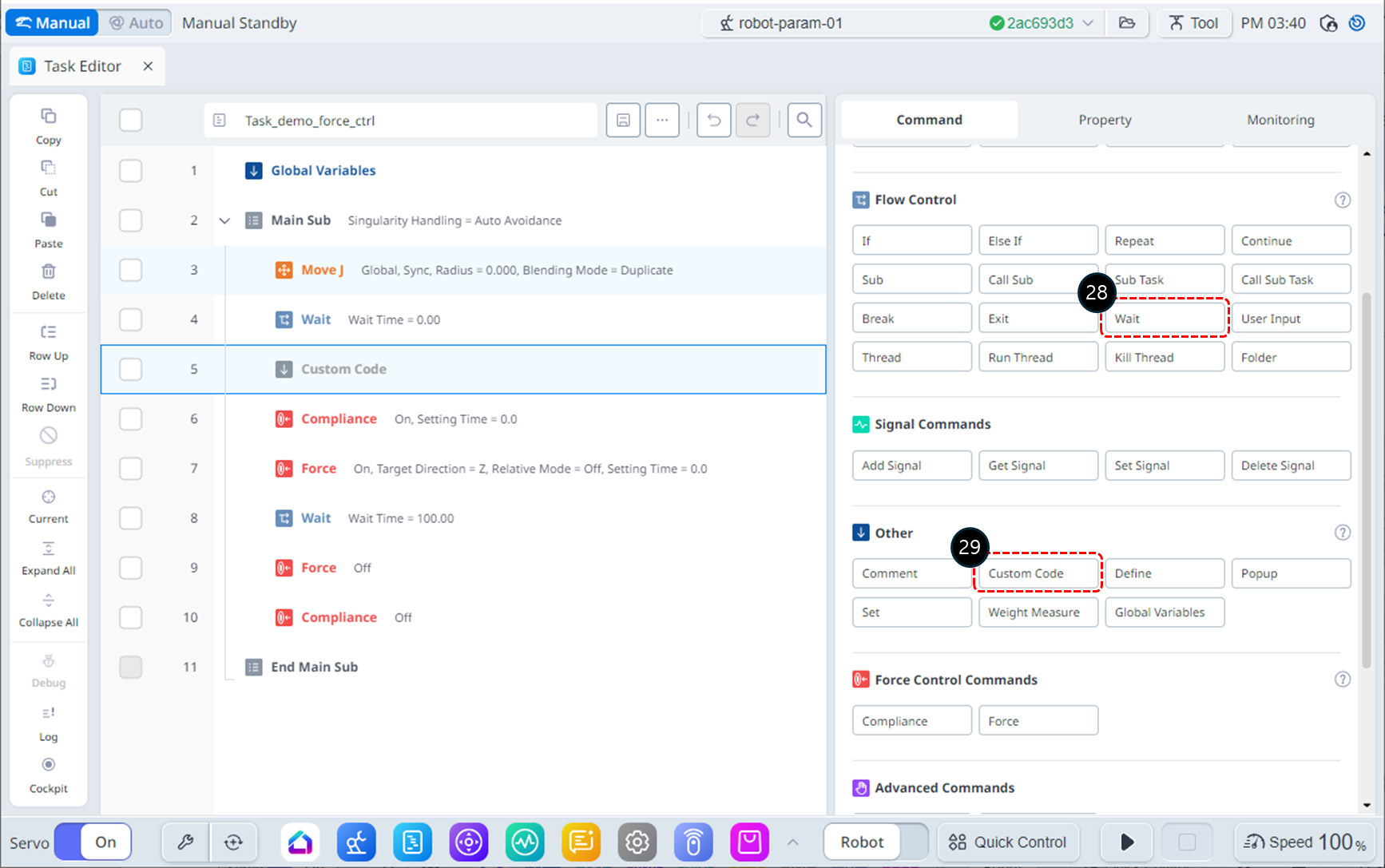
Agregue un comando WAIT a la línea 4 de la Lista de tareas.
Agregue un comando de código personalizado a la línea 5 de la lista de tareas.
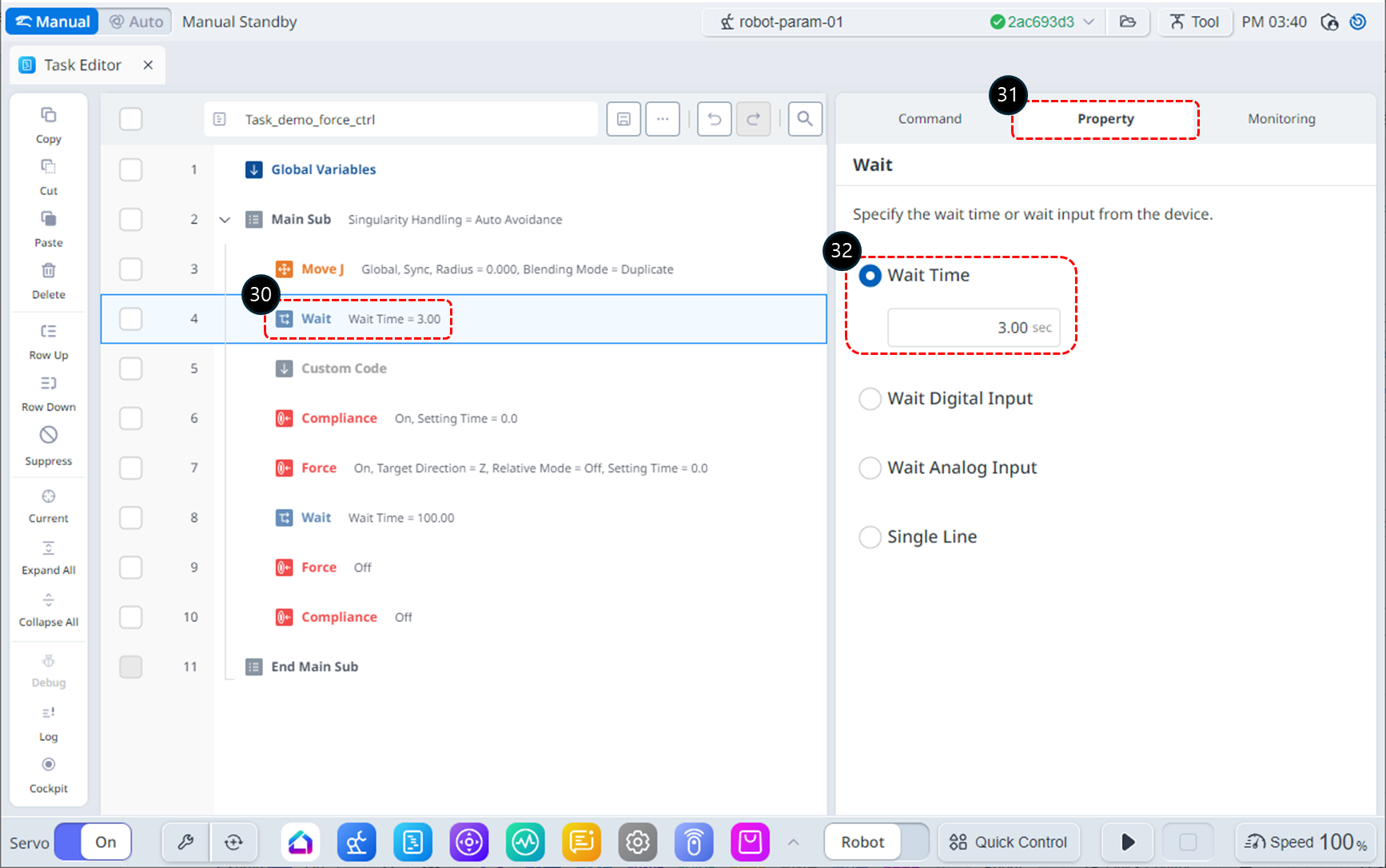
Seleccione el comando Wait en la línea 4.
Seleccione la pestaña Propiedad.
Establezca el tiempo de espera de la siguiente manera.
Tiempo de espera : 3 segundos
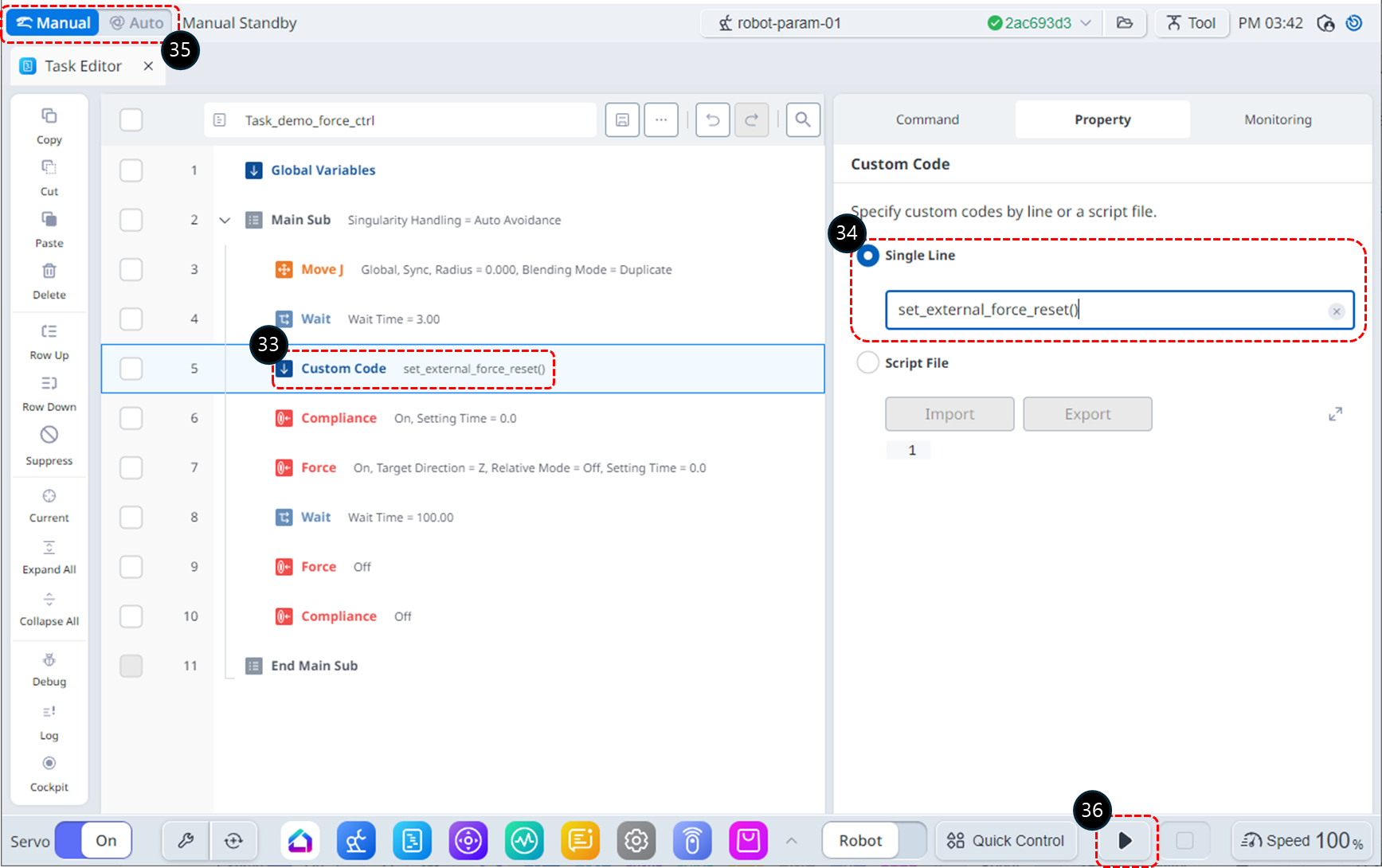
Seleccione el comando Custom Code en la línea 5.
Elija Línea única y agregue el siguiente comando DRL: Este comando restablece los valores del sensor de fuerza externo para eliminar cualquier error.
set_externl_force_reset()
Cambie el modo de operación a Auto. La pestaña Propiedad cambiará automáticamente a la pestaña Monitoreo.
Haga clic en el botón Ejecutar.
En la pestaña Monitoreo, compruebe los valores TCP Force. Notará que el error se ha reducido en comparación con antes de usar el comando set_external_force_reset().