Límites y seguridad del robot
Configuración de límites de robot
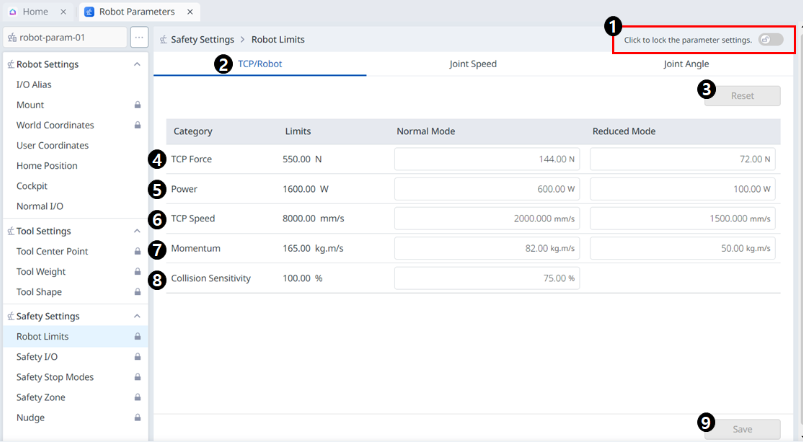
En Robot Limits, se pueden establecer varios límites relacionados con el robot. Estos límites se utilizan para garantizar que el robot funcione de forma segura dentro de los límites establecidos.
Los límites del robot se pueden establecer en el parámetro del robot > Configuración de seguridad > Límites del robot.
Para una descripción detallada de cada límite, consulte Límites de robots.
Los límites de robot se dividen en gran medida en 3 categorías. Cada categoría incluye las siguientes pantallas y funciones.
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | TCP/Robot | Gran clasificación de límites de robots. |
| 3 | Restablecer | Utilizado para restablecer la configuración. |
| 4 | Fuerza | Utilizado para establecer la fuerza. |
| 5 | Poder | Utilizado para establecer el poder. |
| 6 | Velocidad | Se utiliza para establecer la velocidad. |
| 7 | Impulso | Se utiliza para establecer el impulso. |
| 8 | Colisión | Se utiliza para establecer la colisión. |
| 9 | Ahorre | Utilizado para guardar la configuración aplicable. |
Menú
Temas | Descripción | |
|---|---|---|
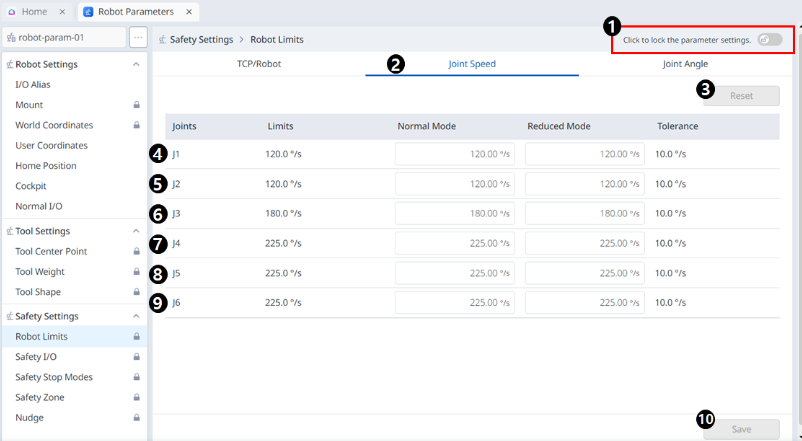
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Velocidad conjunta | Gran clasificación de límites de robots. |
| 3 | Restablecer | Utilizado para restablecer la configuración. |
| 4 | J1 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 5 | J2 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 6 | J3 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 7 | J4 (inactivo para modelos de la serie P) | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 8 | J5 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 9 | J6 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 10 | Ahorre | Utilizado para guardar la configuración aplicable. |
Menú
Temas | Descripción | |
|---|---|---|
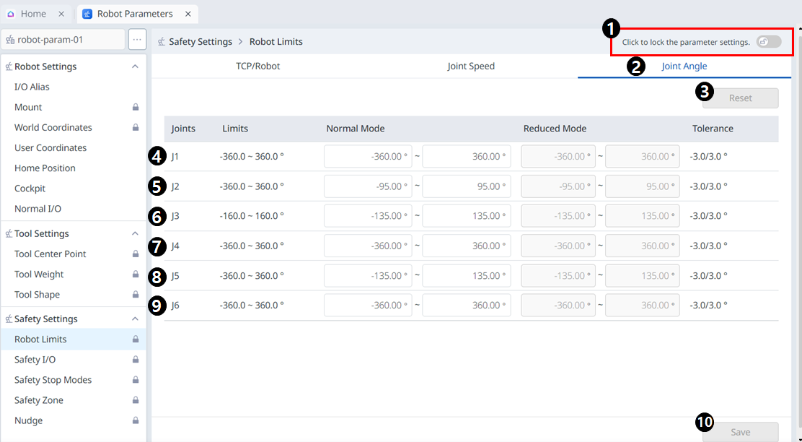
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Ángulo de articulación | Gran clasificación de límites de robots. |
| 3 | Restablecer | Utilizado para restablecer la configuración. |
| 4 | J1 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 5 | J2 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 6 | J3 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 7 | J4 (inactivo para modelos de la serie P) | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 8 | J5 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 9 | J6 | Se utiliza para establecer los ajustes para los modos normal y reducido respectivamente. |
| 10 | Ahorre | Utilizado para guardar la configuración aplicable. |
I/O de seguridad
Esta función se utiliza para ingresar / emitir señales relacionadas con la seguridad a los terminales redundantes. Si se detecta que alguna de las señales de entrada/salida de seguridad tiene una señal redundante diferente, se determina un fallo de circuito abierto o hardware y se detiene el robot en el modo de parada STO.
Para configurar la E/S de seguridad, seleccione Parámetros del robot > Ajustes de seguridad > E/S de seguridad.
Para obtener más información, consulte Seguridad Señal I/O .
Aportación
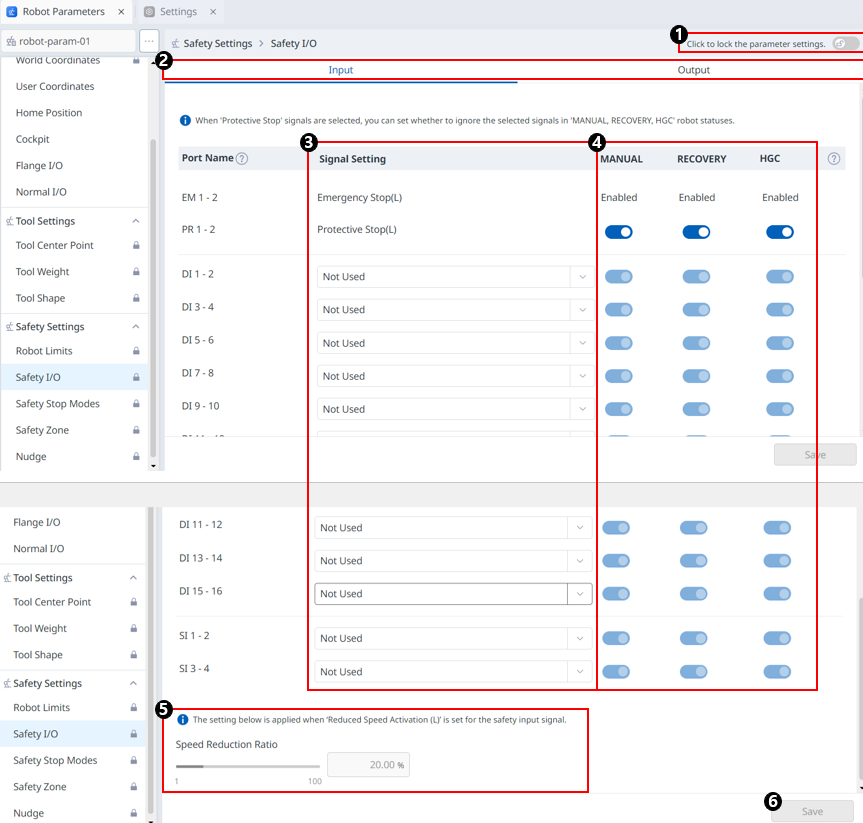
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Entrada/salida | Cualquiera de las entradas/salidas se pueden seleccionar para ser configuradas. |
| 3 | Ajuste de la señal | Opciones establecidas para cada puerto. No se utiliza |
| 4 | Seleccione si ignorar la señal dependiendo del estado del robot | Si selecciona la señal 'Parada protectora', puede establecer si ignora la señal seleccionada en los estados del robot 'MANUAL, RECUPERACIÓN, HGC'. |
| 5 | Establezca la tasa de desaceleración | Puede establecer la tasa de desaceleración. Puede ser de 0 a 100. |
| 6 | Ahorre | Este botón le permite guardar la configuración que ingresó. |
Producto
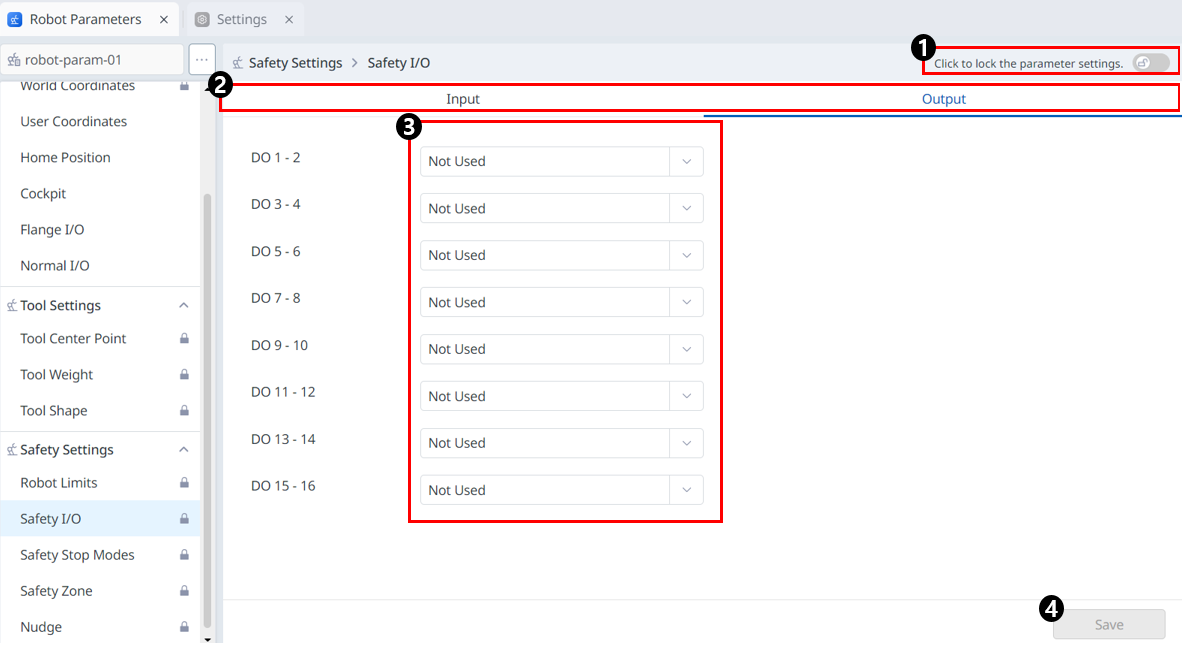
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Entrada/salida | Cualquiera de las entradas/salidas se pueden seleccionar para ser configuradas. |
| 3 | Ajuste de la señal | Opciones establecidas para cada puerto. No se utiliza |
| 4 | Ahorre | Este botón le permite guardar la configuración que ingresó. |
Configuración de los modos de parada de seguridad
Aprenda los tipos de paradas de seguridad y cómo enganchar/desenganchar la parada de seguridad.
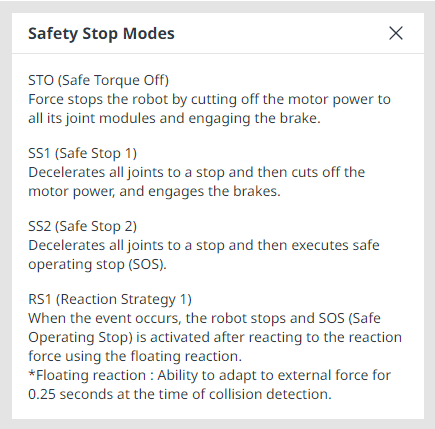
Tipos de paradas de seguridad
Los modos de parada proporcionados para garantizar la seguridad del usuario son los siguientes:
STO (Safe Torque Off): Paradas Servo apagado (la potencia del motor se apaga inmediatamente)
SS1 (parada segura 1): Servo apagado después de la parada máxima de la desaceleración
SS2 (parada segura 2): Espera después de la parada máxima de la desaceleración (pausa)
RS1: En caso de colisión, cumple con la dirección opuesta a la colisión y luego entra en espera (solo se puede establecer en Detección de colisión / Violación de límite de fuerza TCP)
Los robots Doosan Robotics tienen dos tipos de funciones de parada de seguridad. La parada de emergencia se utiliza para situaciones de emergencia generales, y el robot puede reanudar la operación con Servo encendido después de liberar la parada de emergencia. En caso de parada protectora, el robot puede reanudar la operación resolviendo la causa de la parada protectora y liberando la parada.
Parada de emergencia: Establece el modo de parada cuando se activa el botón de parada de emergencia del colgante Teach o un dispositivo externo instalado adicionalmente
Se activa cuando se presiona el interruptor de parada de emergencia del colgante Teach o el conectado al terminal TBSFT EM.
Solo STO o SS1 pueden ser seleccionados.
Parada protectora: Establece el modo de parada cuando se activa el equipo de protección conectado externamente
Se activa cuando se activa el equipo de protección conectado al terminal TBSFT PR.
Para obtener más información sobre las funciones de parada de seguridad, consulte Funciones de seguridad.
Cómo enganchar/desenganchar la parada de seguridad
Presione el botón Parada de emergencia en el colgante Teach o active el dispositivo de seguridad conectado a la E/S de seguridad para activar la parada de emergencia. Los dispositivos de seguridad se pueden conectar a la parada de emergencia o a la parada protectora a través de los parámetros del robot > Configuración de seguridad > Funciones de E/S de seguridad de la pantalla colgante Teach.
Para obtener más información sobre cómo conectar un dispositivo de seguridad a la E/S de seguridad, consulte Connect Controller I/O.
Para obtener información sobre cómo configurar la función de parada de seguridad para esta conexión en el programa, consulte Seguridad Señal I/O.
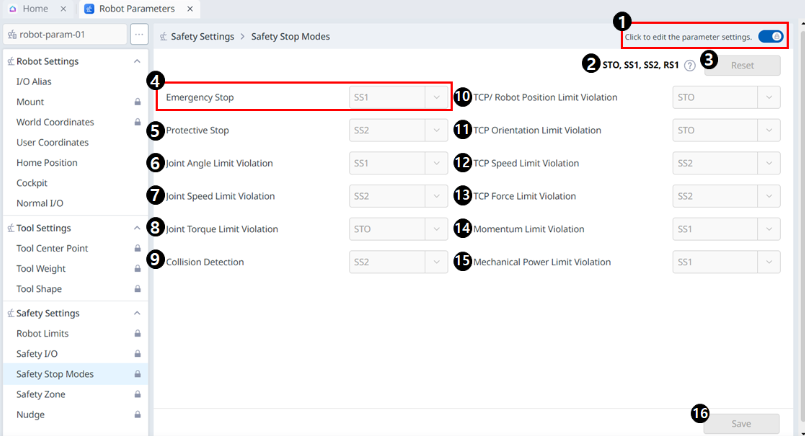
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Botón de palanca de bloqueo | Utilizado para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
| 2 | Mensaje de información | Un mensaje que proporciona la información necesaria para la configuración. |
| 3 | Restablecer | Un botón para restablecer la configuración. |
| 4 | Parada de emergencia | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO SS1 |
| 5 | Parada protectora | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: SS1 SS2 |
| 6 | Violación de límite de ángulo conjunto | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO SS1 SS2 |
| 7 | Violación del límite de velocidad conjunta | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 |
| 8 | Violación conjunta del límite de torque | Solo STO está disponible. |
| 9 | Detección de colisiones | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 RS1 |
| 10 | Violación del límite de posición del robot TCP | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO SS1 SS2 |
| 11 | Violación del límite de orientación de TCP | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 |
| 12 | Violación del límite de velocidad de TCP | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. El menú desplegable incluye lo siguiente: STO (excepto para la serie H/P) SS1 SS2 |
| 13 | Violación del límite de fuerza TCP | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 |
| 14 | Violación del límite de impulso | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 |
| 15 | Violación mecánica del límite | Se puede seleccionar una parada de seguridad para ser utilizada para el artículo correspondiente. Los menús desplegables incluyen: STO (excepto para la serie H/P) SS1 SS2 |
| 16 | Ahorre | Este botón le permite guardar los valores de configuración. |
Nota
El siguiente pop-up aparece en el mensaje de información: