
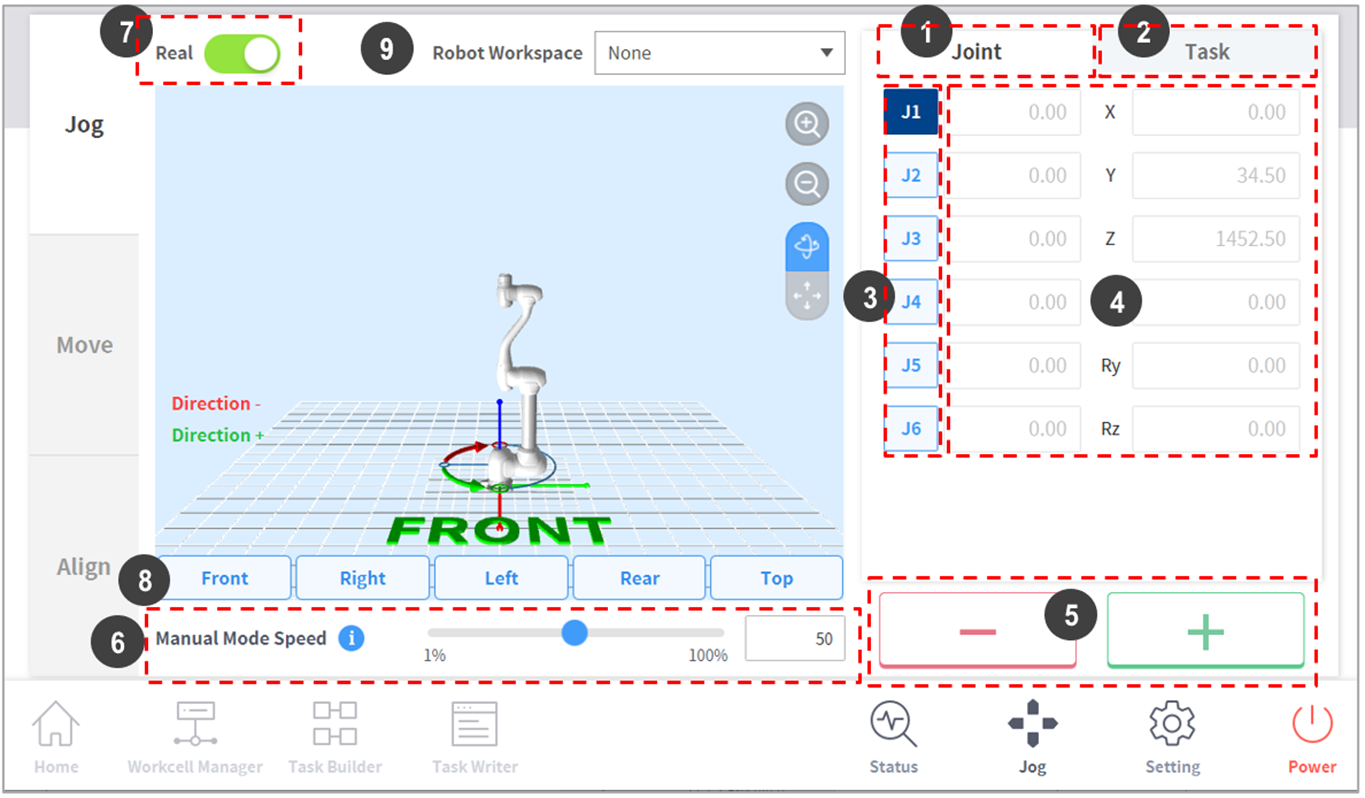
Jog Screen
It is possible to navigate based on the current robot position on the jog screen.
No. | Item | Description |
1 | Joint | It configures the joint as the reference coordinate for jog mode. |
2 | Task | It configures the task as the reference coordinate for jog mode. |
3 | Select Axis | Select an axis to move in jog mode.
|
4 | Coordinate Display | The coordinates of the robot currently operated in Jog mode is displayed. If the robot position changes by pressing the direction button, the coordinate also changes. |
5 | Direction | It moves the robot in the + or - direction on the selected axis. |
6 | Manual Mode Speed | Configures the robot movement speed in manual mode. The speed can be adjusted by dragging the slider pointer. If the slider pointer is at 100%, the corresponding maximum joint speed on the Jog tab is 30 deg/s, and the maximum task speed is 250 mm/s. This speed influences the speed controlled by the jog and movement buttons. |
7 | Real Mode | It configures whether to operate the robot in real mode while in jog mode.
|
8 | Simulator Alignment | It selects the alignment direction of the robot displayed in the simulator. Pressing each direction button aligns the robot in the corresponding direction. |
9 | Robot Workspace | It displays robot workspace information registered in the Workcell Manager in the Jog Simulator. Press the drop-down menu to select the workspace to display. |


Note
- TCP Speed Limit: The highest operation speed during jog and movement button operation is limited to 250 mm/s according to safety policies.
- If the robot stops due to reaching the joint limit or if a collision is detected while moving the robot with jog mode, set the safety recovery mode and move the robot to be positioned within the joint angle limit. For more information about Safety Recovery Mode, refer to “ Safety Recovery Mode”