
Execute based on Robot Tool
To move the robot based on the robot tool, follow these steps:
- Select the Task tab on the Jog screen.
- Select Base or World as the display coordinates and set the Tool based on the reference point of the task coordinates.
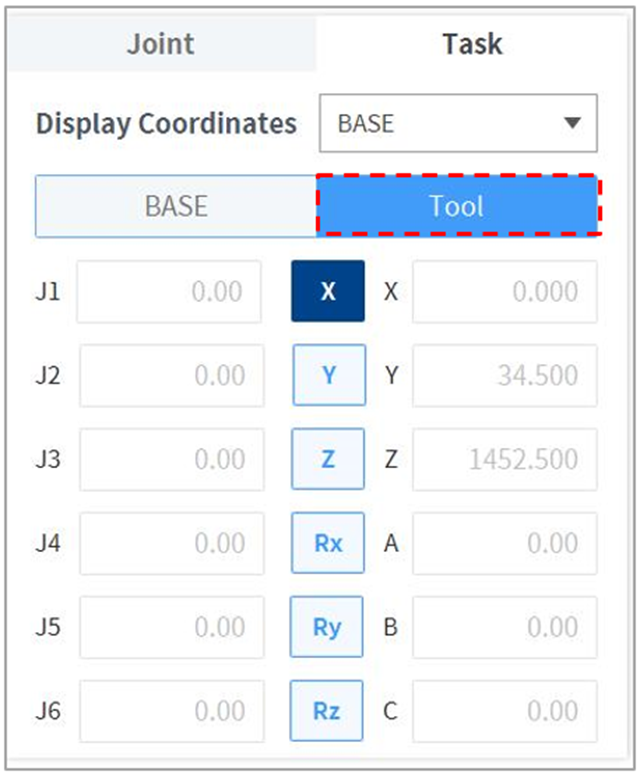
- Select the Tool Coordinates to move.
- Press and hold the Direction Button (


Note
- Safety area does not apply in virtual mode.
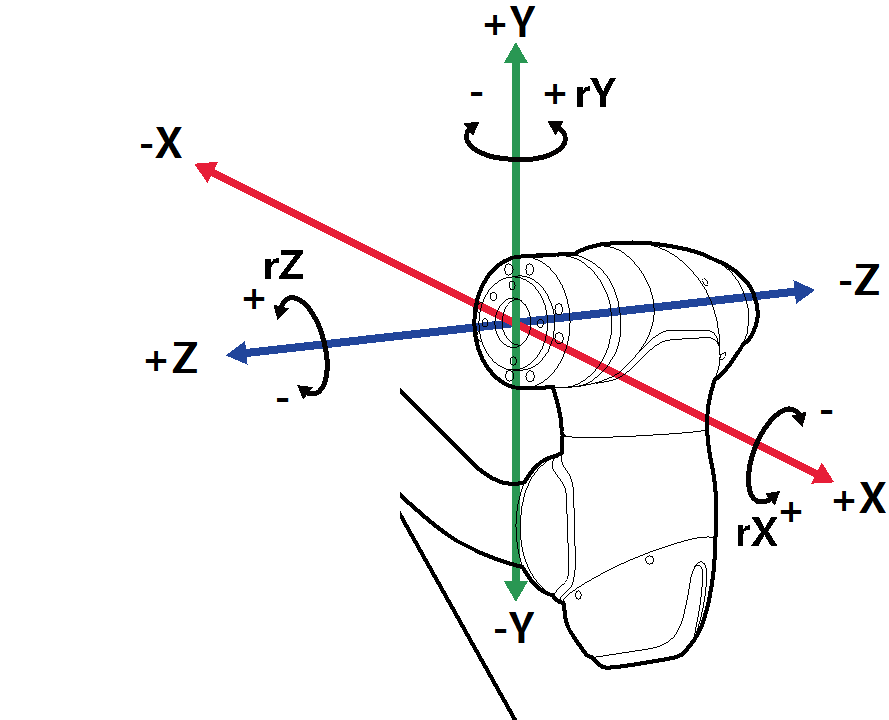
- Rx, Ry and Rz are executed according to TCP (tool center position).