Space Limit and Settings of Zones
Common
Effective Area can be selected as either Interior/Exterior.
Shape Type can be selected as Sphere, Cylinder, Cuboid, Tilted Cuboid, or Multi-plane Box. For more information, see Overview of Space Limit and Zone settings.
Space Limit Setting
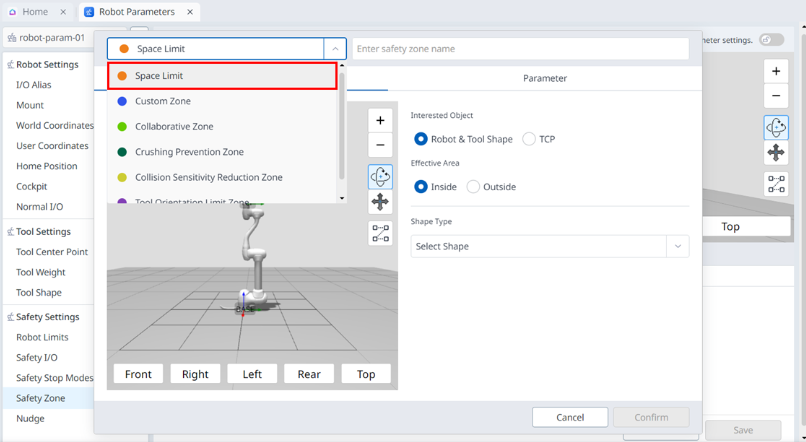
Space Limit is a function that sets a virtual fence in the outermost area of the robot. You can operate the robot without setting a space limit, but it is recommended to set a space limit for safe use.
You can set it by selecting 'Space Limit' in Robot Parameters > Safety Zone > Add > the top left of the pop-up.
You can select one of the Robot & Tool Shape/TCP for the Interested Object.
The robot must be within the space limit area set to be set normally.
Note
Depending on how you set it, the default value of Space Expansion exists.
Tool shape setting, when selecting 'TCP' for inspection, TCP margin value 0mm
Tool shape setting, when selecting 'Robot & Tool Shape' for inspection, TCP margin value 0mm
Tool shape not set, when selecting 'TCP' for inspection, TCP margin value 0mm
Tool shape not set, when selecting 'Robot & Tool Shape' for inspection, TCP margin value 60mm
Setting the custom zone
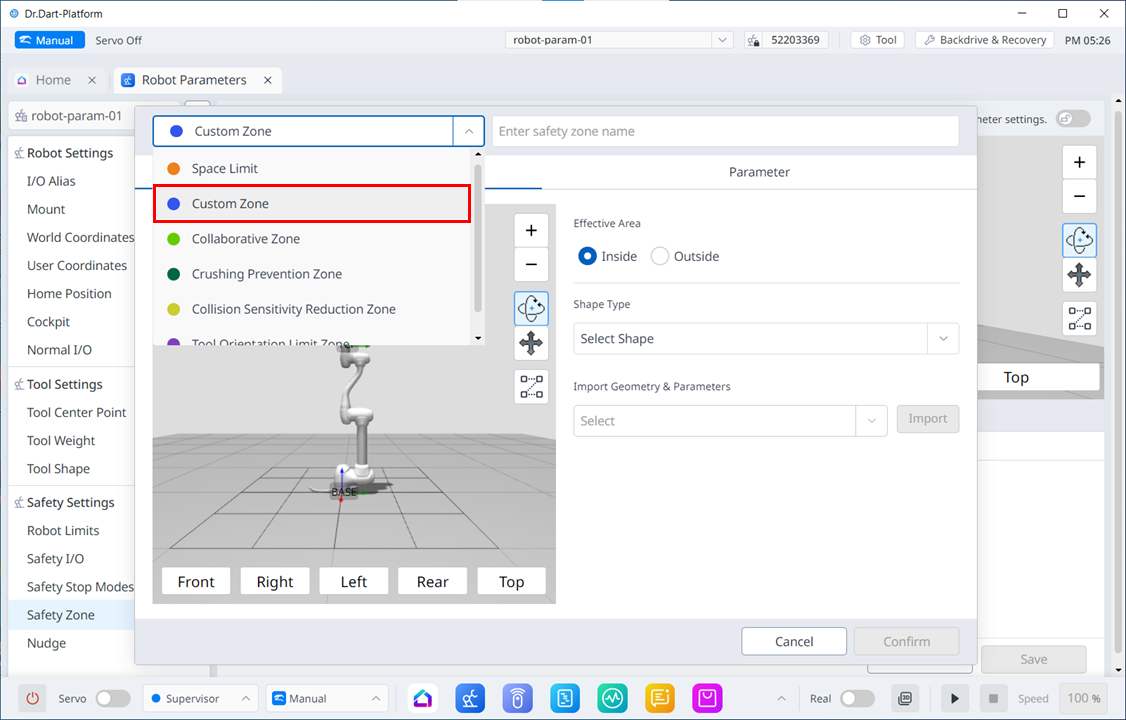
Custom Zone is the most flexible safety zone where you can freely set safety parameters. You can configure all settings such as robot limits, safe stop mode, joint speed and angle limits to suit your needs.
You can set it by selecting ‘Custom Zone’ in Robot Parameters > Safety Zone > Add > pop-up top left.
Note
If TCP is in a position where multiple areas overlap, the following rules apply individually for each safety feature.
Normal Mode
If no zones are set to high priority zones, the most restricted safety limit value of the overlapping zones will be the inspection reference value.
If there is one zone set as a high priority zone, the limit value for that zone is the inspection reference value.
If there are more than two zones set as high priority zones, the most relaxed safety limit value of the zones will be the inspection criteria.
Reduce Mode
If no zones are set to high priority zones, the most restricted safety limit value of the overlapping zones will be the inspection reference value.
If there is one zone set to a high priority zone, the override option for that zone determines the inspection reference value.
If the override option is not checked, the most limited safety limit value between the high priority zone and the Global-Reduced Limit will be the inspection reference value.
If the override option is checked, the high priority zone is the check reference value.
If there are more than one zone set to a high priority zone, the override option for that zone determines the inspection reference value.
If the override option is not checked for any of the high priority zones, the highest priority zone for which the override option is not checked and the most limited safety limit value of the Global-Reduced Limit will be the inspection reference value.
If the override option for all high priority zones is checked, the most relaxed safety limit value among high priority zones will be the inspection criteria.
Setting the Collaborative Zone
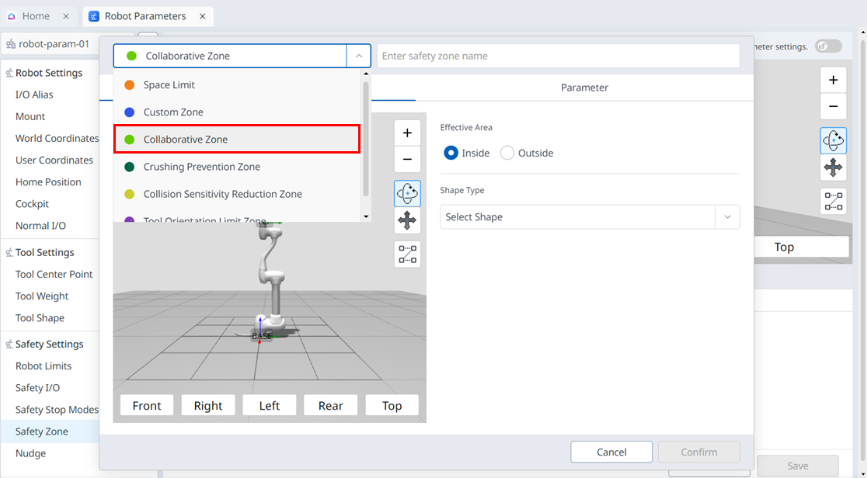
The Collaborative Zone is a zone designed to work safely with robots. It provides robot limits such as deceleration rates required for close-range work, and safe stop mode settings.
You can set it by selecting ‘Collaborative Zone’ in Robot Parameters > Safety Zone > Add > Popup’s top left.
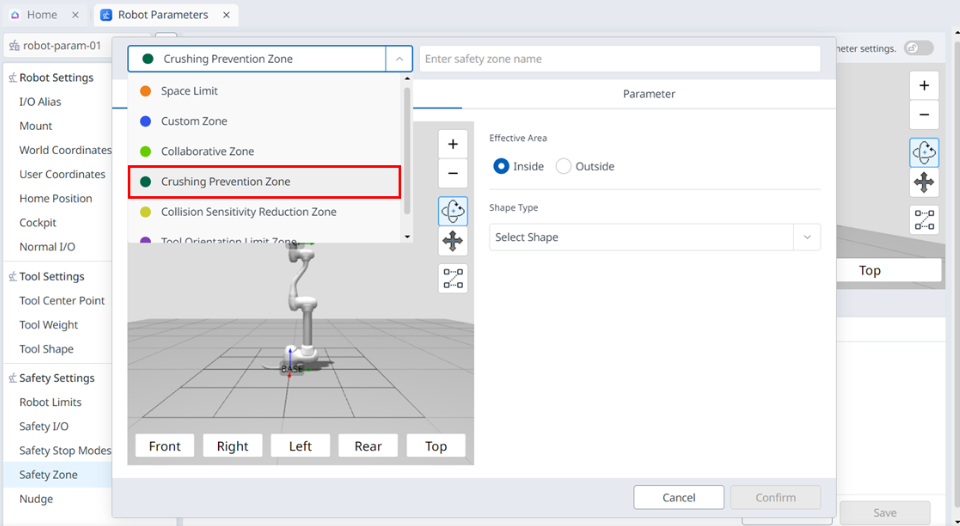
Setting the Crushing Prevention Zone
The Crushing Prevention Zone is a zone to prevent crushing hazards that may occur between the robot and other objects. In this zone, when the collision and external force limit is violated, the safety stop mode is fixed to RS1 (Reflex Stop) and the collision sensitivity is set to 100%, so that when a collision is detected, the robot reacts as sensitively as possible to external force and then safely stops through floating reaction.
You can set it by selecting ‘Crushing Prevention Zone’ in Robot Parameters > Safety Zone > Add > Popup’s upper left.
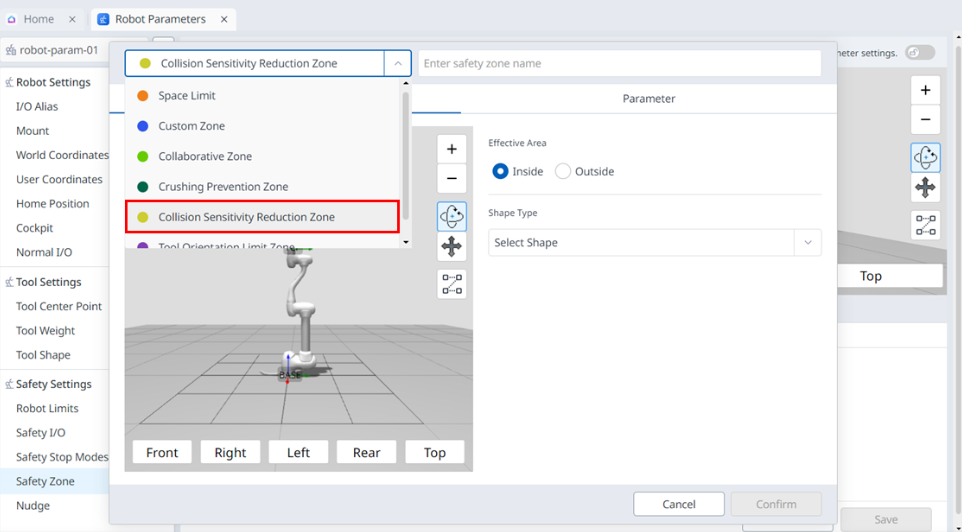
Setting the Collision Sensitivity Reduction Zone
Collision Sensitivity Reduction Zone is a zone that adjusts the collision detection sensitivity of the robot when working with different materials or surfaces. It provides force and collision sensitivity settings.
You can set it by selecting ‘Collision Sensitivity Reduction Zone’ in Robot Parameters > Safety Zone > Add > Top left of the popup.
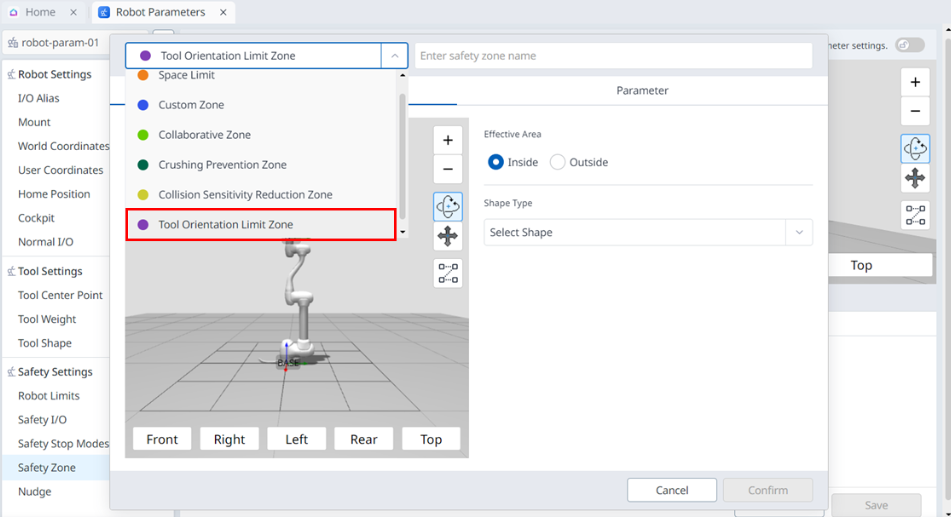
Setting the Tool Orientation Limit Zone
Tool Orientation Limit Zone is a zone that limits the orientation of the TCP. It ensures that the TCP faces a specific direction and prevents it from facing an unsafe direction by defining the direction and angle margin.
You can set it by selecting ‘Tool Orientation Limit Zone’ in Robot Parameters > Safe Zone > Add > Top left of the popup.