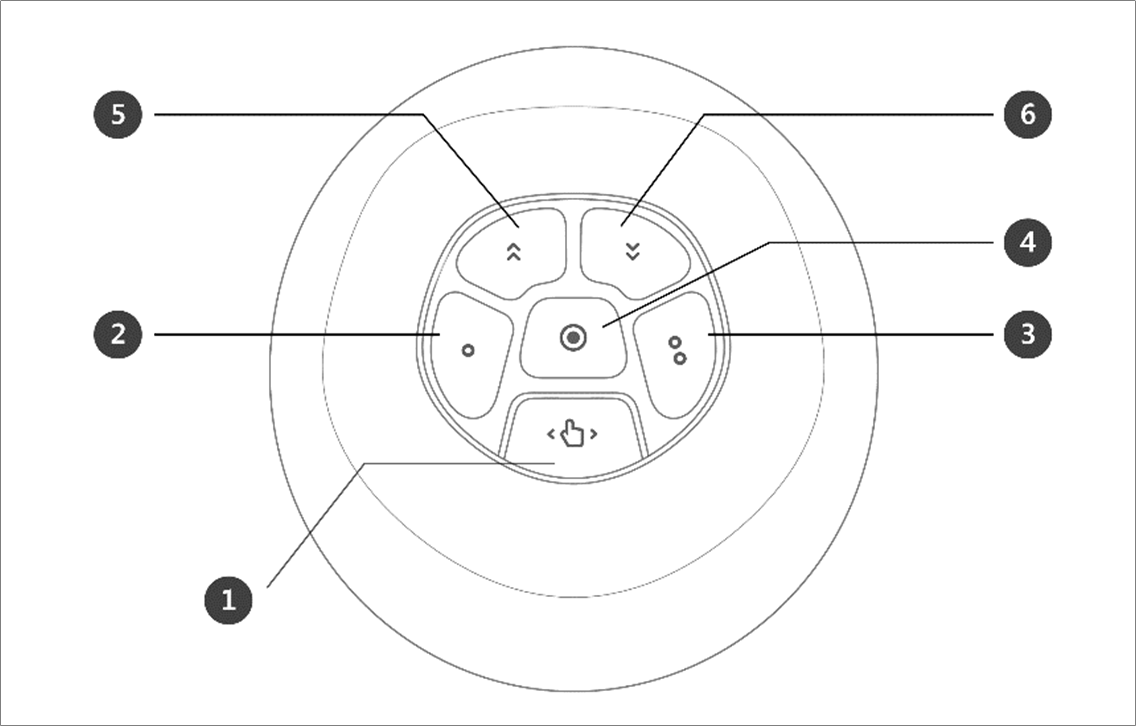
Mit dieser Taste kann die Roboterstellung angepasst oder geändert werden.
2,3
User Setting Button
Diese Schaltfläche kann die Stellung des Roboters durch Eingabe einer Stellung entsprechend eines einer Betriebsart zugeordneten Sperrzustands verändern.
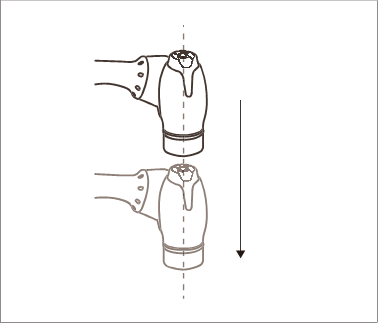
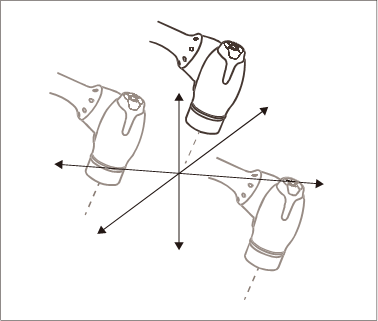
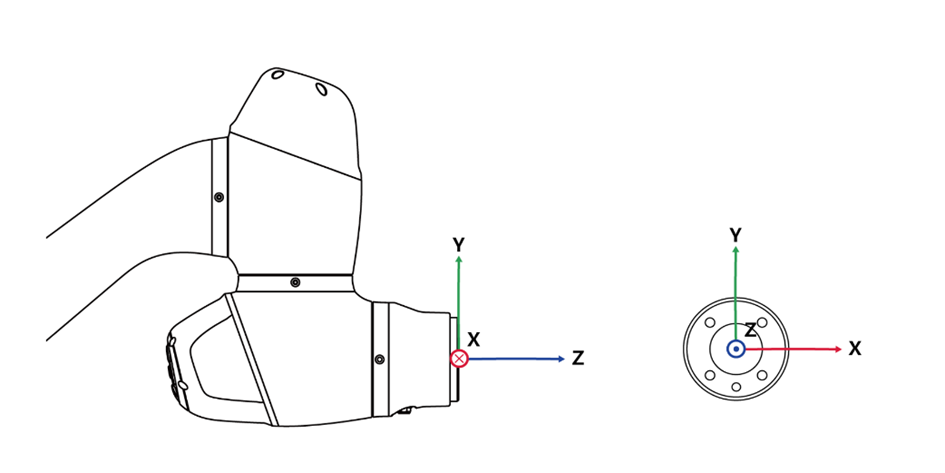
Achsensperre: Ändert die Stellung auf der Grundlage der Z-Achse im Werkzeug-Koordinatensystem
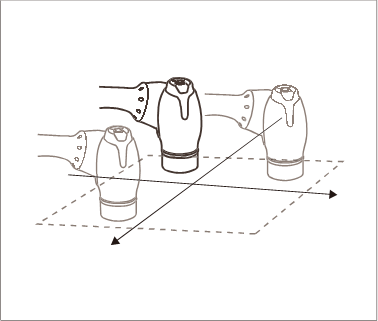
Oberflächensperre: Ändert die Stellung auf der Grundlage der Oberfläche X-Y im Werkzeug-Koordinatensystem
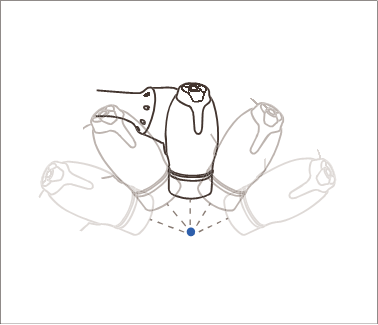
Punktsperre: Ändert den Winkel ausschließlich auf der Grundlage des Bezugspunkts im Werkzeug-Koordinatensystem
Winkelsperre: Ändert die Position mit nur dem aktuellen TCP-Winkel gesperrt
Verlagert den auf dem Bildschirm angezeigten Fokus um eine Zeile nach oben
6
One Line Down
Verlagert den auf dem Bildschirm angezeigten Fokus um eine Zeile nach unten
Hinweis – Änderung der Einrichtung des Steuerpults (Cockpit)
Eine Änderung der Einstellungen für die Handführungstaste und die Bewegungsbegrenzungstaste dauert 0,2 Sekunden.
Bei Verwendung der Speichertaste für Stellungen im Bildschirm für die Einstellung der Fertigkeiten wird der Fokus automatisch zur nächsten Stellung verschoben.
Die Schaltfläche „Cancel“ (Abbrechen) kann nur im Fenster für „Skill Setting“ (Einstellung von Fertigkeiten) verwendet werden, in dem mehrere Stellungen verwaltet werden.
Achtung
Modelle der A-Serie ohne FTS (A0509, A0912) können keine feste Bewegung nutzen.
Modelle der A-Serie mit FTS (A0509S, A0912S) können die feste Bewegung nutzen.
Die feste Bewegung ist darauf angewiesen, dass der FTS am Ende des Roboters angebracht ist. Daher muss das Werkzeug angebracht werden – auch damit der Roboter es bei der Bewegung greifen kann. Eine Bewegung des Roboters beim Halten des Gestells löst möglicherweise keine Reaktion des Roboters aus.