
Manuelle Bedienung - Erfahren Sie, wie Sie joggen
OBLIGATORISCH NORMAL 15 MIN
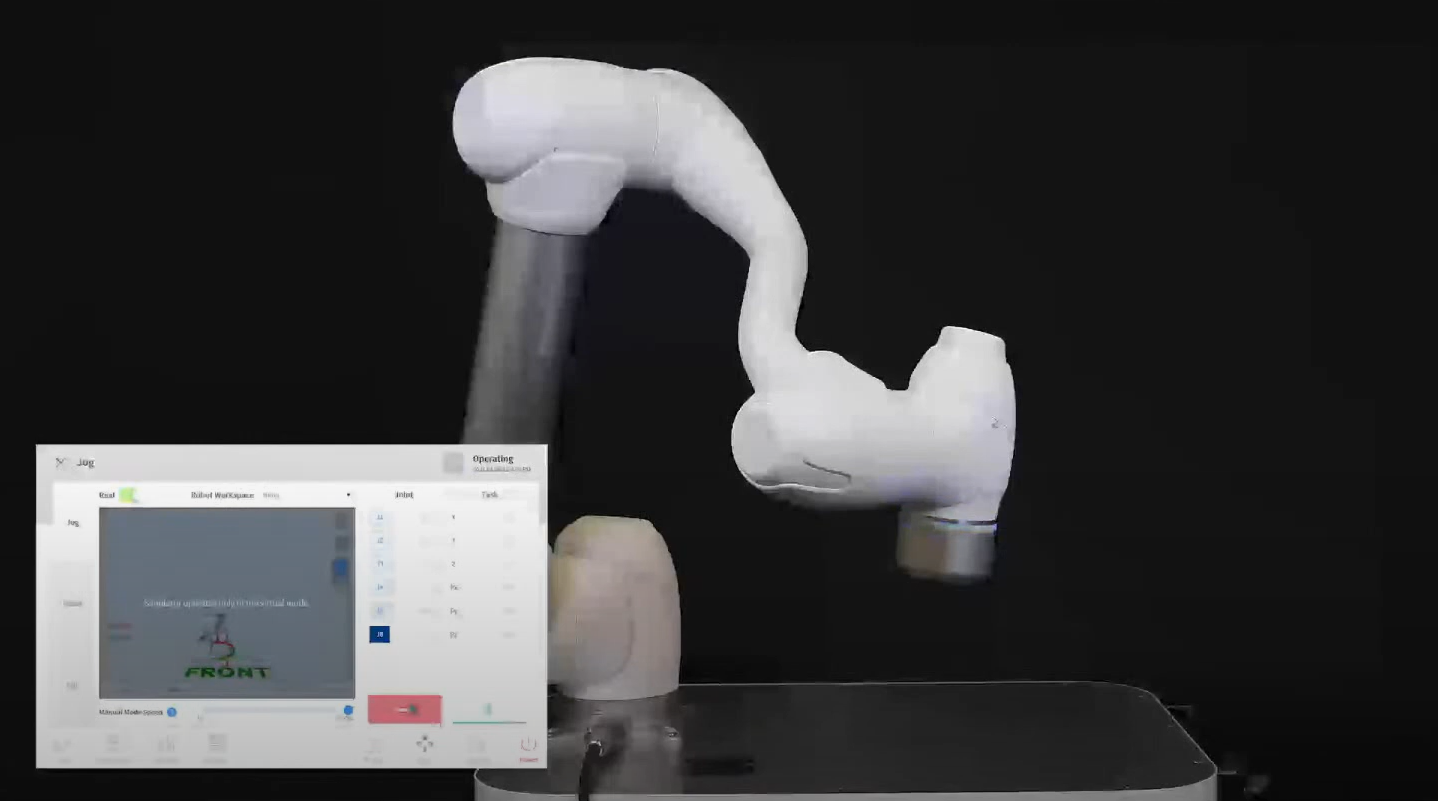
Der Benutzer kann auf der Registerkarte Jog eine manuelle Bewegungsmethode auswählen. Weitere Informationen zum Jog/Move/Align finden Sie unter Verfahrfunktion.
- Joggen: Es bewegt das Robotergelenk oder TCP auf die vom Benutzer ausgewählte Gelenkachse oder Koordinatenachse
- Verschieben: Es bewegt das Robotergelenk oder TCP zum vom Benutzer eingegebenen Zielpunkt
- Ausrichten: Es bewegt das Roboterende zur Ebene senkrecht zur vom Benutzer ausgewählten Ebene und die Koordinatenachse parallel zum Roboterende
Die Roboterbewegung besteht aus zwei Arten.
- Gemeinsame Bewegung: Sie bewegt jedes Gelenk linear mit einer rotierenden Bewegung
- Aufgabenbewegung: Das Ende wird linear zum Zielpunkt verschoben
Im Folgenden wird die Methode beschrieben, wie der Roboter mithilfe einer Gelenkbewegung vom Tippbildschirm aus bewegt wird:
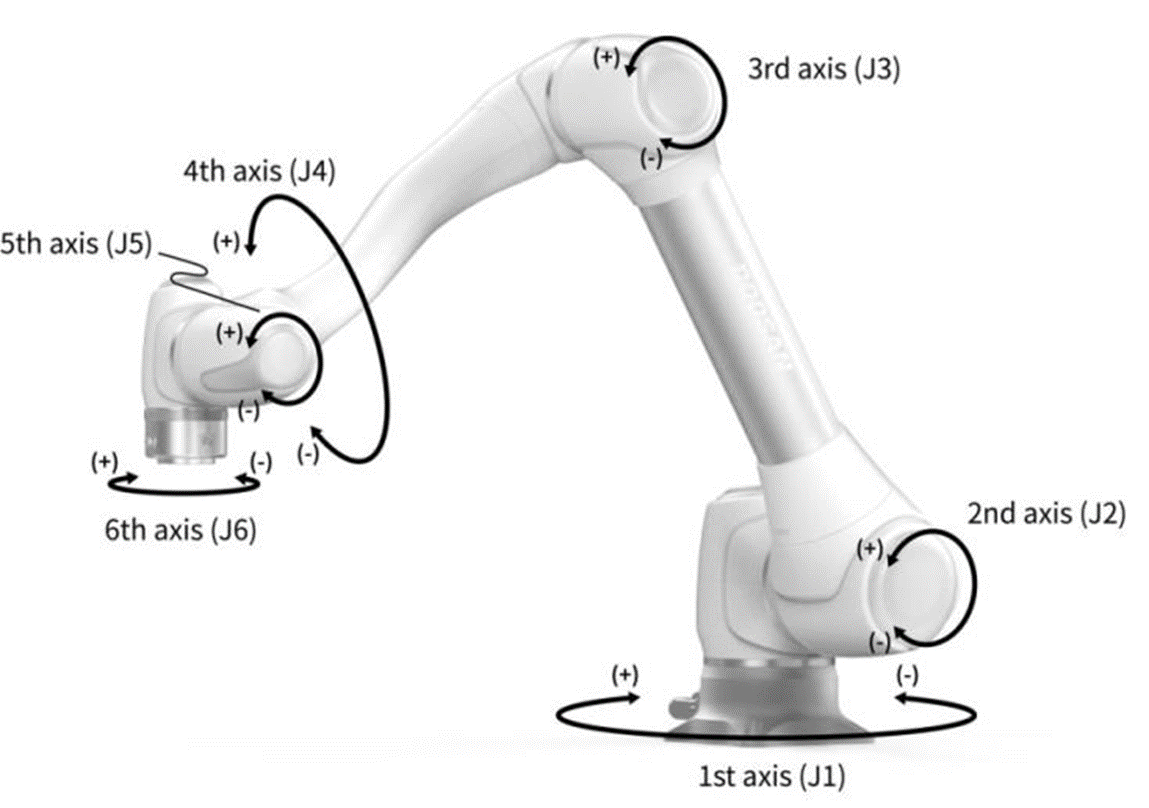
- Wählen Sie die Registerkarte Verbindung.
- Wählen Sie die zu verschiebe-ende Achse aus. Sie können beispielsweise J1 auswählen.
- Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
Im Folgenden wird die Methode beschrieben, wie der Roboter mithilfe der Aufgabenbewegung auf dem Tippbildschirm bewegt wird:
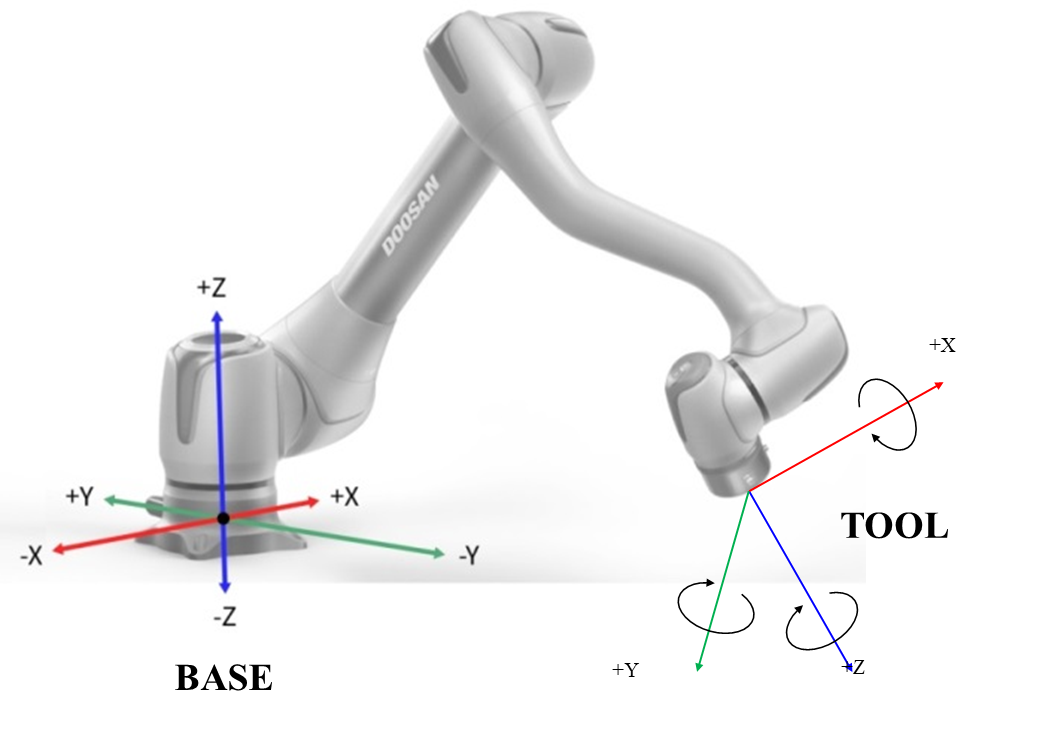
- Wählen Sie die Basiskoordinaten aus. Der Roboter kann entsprechend den BASISKOORDINATEN oder den WERKZEUGKOORDINATEN bewegt werden.
- Wählen Sie die zu verschiebe-ende Richtung aus. Beispielsweise kann die X-Achse ausgewählt werden.
- Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
Weitere Informationen über die Bewegung von Jog, Bewegen und Ausrichten finden Sie unter Bildschirm „Jog“ (Verfahren)bzw. Bewegungsbildschirm Bildschirm für Ausrichten .
Hinweis
- Wenn der Umschalter des tatsächlichen Modus oben links im Jog-Bildschirm ausgeschaltet ist, bewegt sich der Roboter nur auf dem virtuellen Bildschirm links vom Jog-Bildschirm. Der eigentliche Roboter bewegt sich, wenn der Toggle-Schalter für den tatsächlichen Modus eingeschaltet ist.