
Bewegungsbildschirm
Der Roboter kann durch Auswahl von Zielwinkel bzw. Zielkoordinaten im Bildschirm „Move“ (Bewegen) bewegt werden. Wenn die Koordinaten, zu denen der Roboter bewegt werden muss, bekannt sind oder der Roboter zu Koordinaten bewegt werden muss, die als Dezimalzahl verfügbar sind, kann der Roboter durch Eingabe der Koordinaten bewegt werden.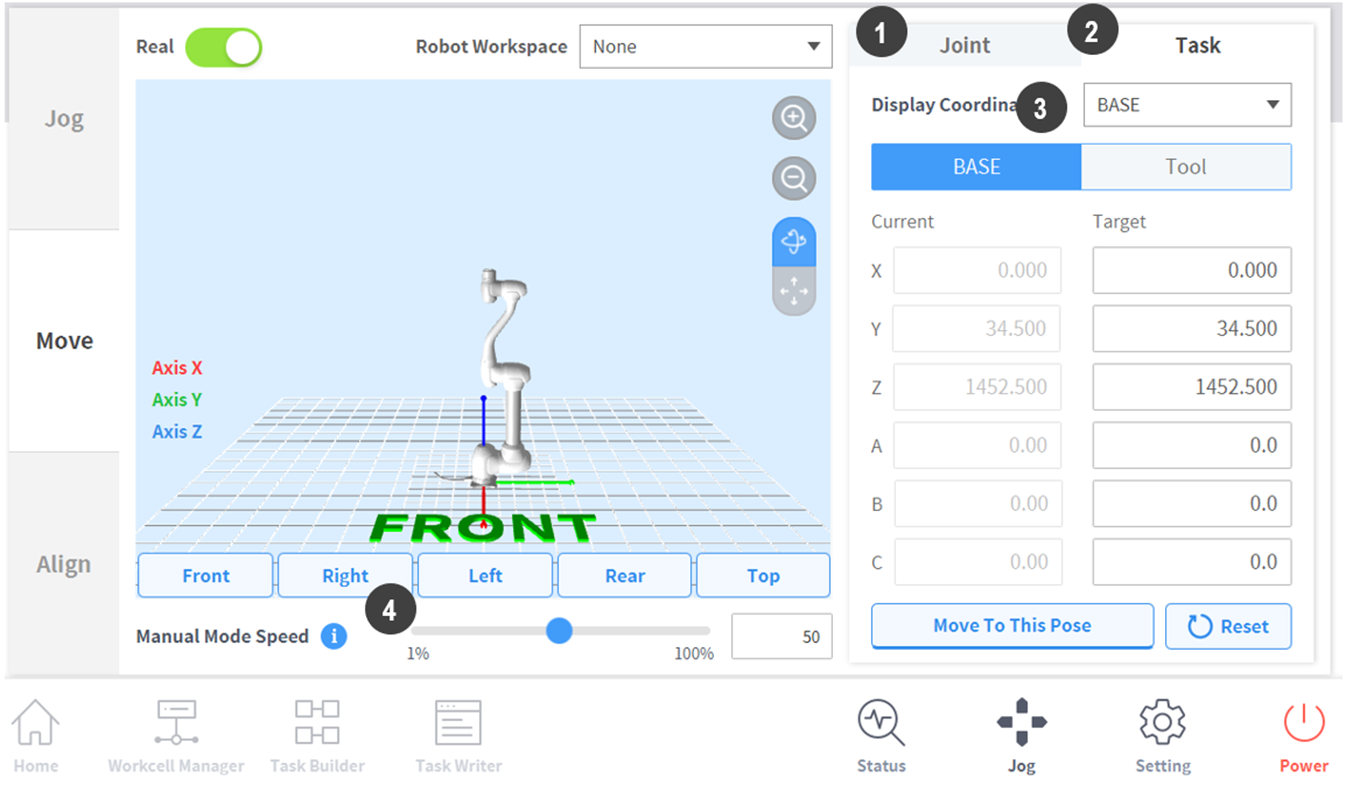
Nr. | Element | Beschreibung |
|---|---|---|
1 | Joint | Konfiguriert die Bezugskoordinate, die verwendet werden soll, wenn der Roboter im Verfahrmodus bewegt wird. |
2 | Task | Konfiguriert den Bezugswinkel, der verwendet werden soll, wenn der Roboter im Verfahrmodus bewegt wird. |
3 | Reference Point Setting | Konfiguriert den Bezugspunkt für die Ausrichtung der Aufgabenkoordinate. Base (Fuß): Konfiguriert die Aufgabenkoordinate basierend auf dem Roboterfuß. World: Die Aufgabenkoordinaten werden basierend auf den festgelegten World-Koordinaten festgelegt. Tool (Werkzeug): Konfiguriert die Aufgabenkoordinate basierend auf dem Werkzeug, das am Ende des sechsachsigen Roboters installiert ist. |
4 | Manual Mode Speed | Konfiguriert die Geschwindigkeit der Roboterbewegung in der manuellen Betriebsart. Die Geschwindigkeit kann durch Ziehen des Zeigers am Schieber angepasst werden. Falls sich der Zeiger des Schiebers bei 100% befindet, so beträgt die zugehörige maximale Gelenkgeschwindigkeit an der Registerkarte Move 30 Grad/sek. und die maximale Arbeitsgeschwindigkeit der Aufgabe 250 mm/s. Die Geschwindigkeit beeinflusst die Verfahrgeschwindigkeit und die Geschwindigkeit der Tastenbetätigung. |