
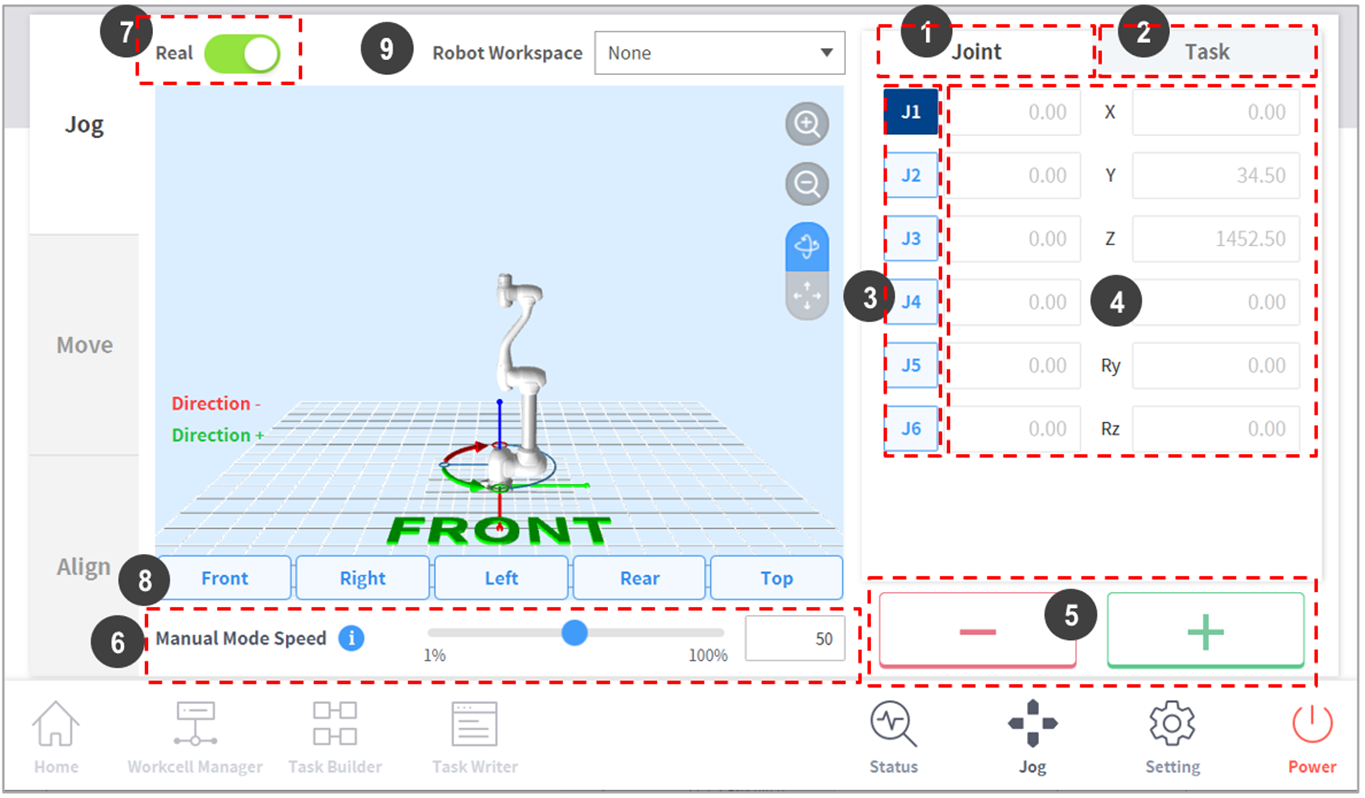
Bildschirm „Jog“ (Verfahren)
Es ist möglich, den Roboter ausgehend von der aktuellen Position im Bildschirm „Jog“ (Verfahren) zu steuern.
Nr. | Element | Beschreibung |
|---|---|---|
1 | Joint | Konfiguriert das Gelenk als Bezugskoordinate für den Verfahrmodus. |
2 | Task | Konfiguriert die Aufgabe als Bezugskoordinate für den Verfahrmodus. |
3 | Select Axis | Achse für die Bewegung im Verfahrmodus auswählen.
|
4 | Coordinate Display | Zeigt die Koordinaten des derzeit im Modus Jog (Verfahrmodus) befindlichen Roboters an. Wird die Roboterposition durch Drücken der Richtungstaste geändert, wird auch die Koordinate geändert. |
5 | Direction | Bewegt den Roboter in Richtung + oder - entlang der ausgewählten Achse. |
6 | Manual Mode Speed | Konfiguriert die Geschwindigkeit der Roboterbewegung in der manuellen Betriebsart. Die Geschwindigkeit kann durch Ziehen des Zeigers am Schieber angepasst werden. Falls sich der Zeiger des Schiebers bei 100% befindet, so beträgt die zugehörige maximale Gelenkgeschwindigkeit an der Registerkarte Jog 30 Grad/sek. und die maximale Arbeitsgeschwindigkeit der Aufgabe 250 mm/s. Diese Geschwindigkeit beeinflusst die Geschwindigkeit, welche von den Tasten für „Jog“ (Verfahren) und Bewegung gesteuert werden. |
7 | Real Mode | Konfiguriert, ob der Roboter im Verfahrmodus im realen Modus arbeitet.
|
8 | Simulator Alignment | Wählt die im Simulator angezeigte Ausrichtung des Roboters. Durch Drücken einer Richtungstaste wird der Roboter zur entsprechenden Richtung ausgerichtet. |
9 | Robot Workspace | Zeigt Informationen zum Roboter-Arbeitsraum an, der in der Verwaltung der Installationsbereiche („Workcell Manager“) im Verfahrsimulator („Jog Simulator“) registriert ist. Durch Auswählen des Ausklappmenüs lässt sich der anzuzeigende Arbeitsraum auswählen. |


Hinweis
- Geschwindigkeitsgrenzwert für Werkzeugreferenzpunkt (TCP): Aufgrund von Sicherheitsrichtlinien ist die höchste Betriebsgeschwindigkeit beim Verfahren von Hand und bei Bewegung durch Tastenbetätigung auf 250 mm/s begrenzt.
- Wenn der Roboter stoppt, weil der Gelenkgrenzwert erreicht wurde oder bei Bewegung des Roboters im Verfahrmodus eine Kollision festgestellt wurde, kann der Roboter durch Aktivieren des Sicherheitswiederherstellungsmodus innerhalb der Gelenk-Winkelgrenzwerte positioniert werden. Weitere Informationen zum Sicherheitswiederherstellungsmodus siehe „Sicherheitswiederherstellungsmodus“.