
Jog Plus-Modul
Der Benutzer kann auf der Registerkarte Jog eine manuelle Bewegungsmethode auswählen.
Jog: Sie verschiebt die Roboterverbindung oder TCP auf die vom Benutzer ausgewählte Verbindungsachse oder Koordinatenachse
Verschieben: Sie verschiebt das Robotergelenk oder die TCP zum Zielpunkt, den der Benutzer eingegeben hat
Die Roboterbewegung besteht aus zwei Typen.
Gelenkbewegung: Sie bewegt jedes Gelenk linear mit einer rotierenden Bewegung
Aufgabenbewegung: Das Ende wird linear zum Zielpunkt verschoben
Im Folgenden wird beschrieben, wie der Roboter mithilfe einer Gelenkbewegung vom Bildschirm Jog aus bewegt wird:
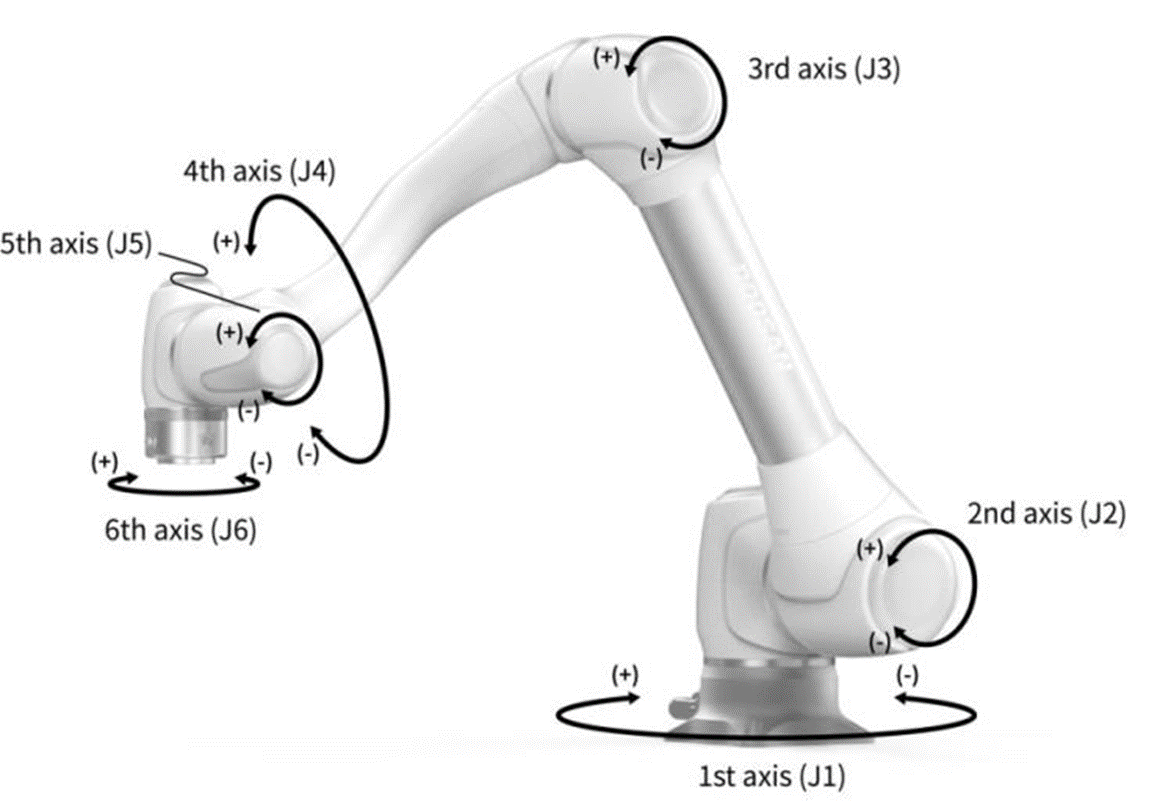
Wählen Sie die Registerkarte Joint (Gelenk) aus.
Wählen Sie die zu verschiebende Achse aus. Sie können beispielsweise J1 auswählen.
Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
tIm Folgenden wird beschrieben, wie der Roboter mithilfe der Aufgabenbewegung auf dem Bildschirm Jog bewegt wird:
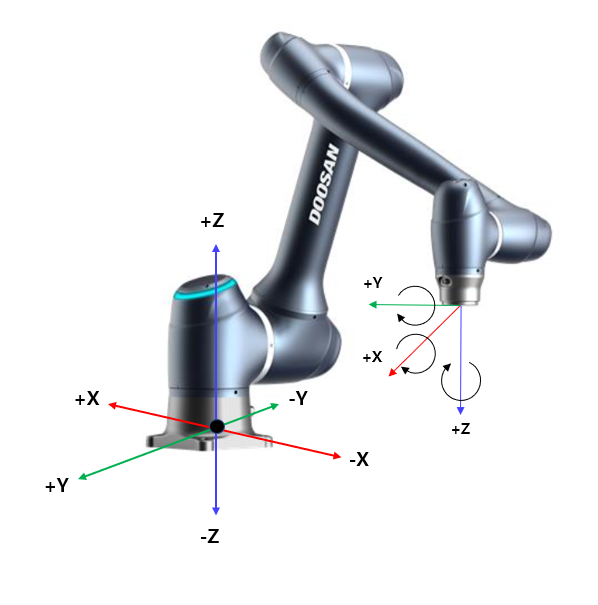
Wählen Sie die Basiskoordinaten aus. Der Roboter kann entsprechend den BASE-Koordinaten oder den TOOL-Koordinaten bewegt werden.
Wählen Sie die zu verschiebende Richtung aus. Beispielsweise kann die X-Achse ausgewählt werden.
Drücken Sie die Taste +/-, um den Roboter zu bewegen. Der Roboter bewegt sich, während die Taste +/- gedrückt wird, und die aktuelle Position wird in Echtzeit auf dem Bildschirm angezeigt.
Weitere Informationen zu jog-bewegungen sowie zum Verschieben und Ausrichten finden Sie unter Jog-Panel bzw Verschieben-Panel.
Hinweis
Wenn der Umschalter des tatsächlichen Modus oben links auf dem Bildschirm Jog (Bewegen) ausgeschaltet ist, bewegt sich der Roboter nur auf dem virtuellen Bildschirm links auf dem Bildschirm Jog (Bewegen). Der eigentliche Roboter bewegt sich, wenn der Kippschalter für den Istmodus eingeschaltet ist.
Mit dem Jog Plus Modul kann der Benutzer den gesamten Arbeitsbereich im manuellen Modus erkunden oder den Operationsbereich als Roboterbedienungsbereich festlegen. Der Bewegungswinkel jeder Achse kann entsprechend dem ausgewählten Operationsraum und der Gelenkwinkelgrenze der Sicherheitseinstellung begrenztwerden.
Um die Jog Plus-Funktion zu verwenden , tippen Sie im Hauptmenü auf das Jog Plus Modul.
Die Jog-Funktion kann bei ausgeschaltetem Servo aus verwendetwerden.
Der Roboter wird manuell im Jog Plus-Bildschirm bedient, sodass er sich nur bewegt, wenn die Jog-Taste gedrückt wird.
Es ist möglich, den Roboter basierend auf der aktuellen Position auf dem Registerkartenbildschirm Jog Plus zu bewegen.
Der Roboter kann durch Konfigurieren des Zielwinkels/der Zielkoordinaten auf der Registerkarte Verschieben bewegt werden.
Es ist möglich, die Referenzkoordinaten auf den Registerkarten Jog Plus und Verschieben als gelenk oder Aufgabe zu konfigurieren.
Hinweis
Wenn der Roboter nicht navigiert werden kann, weil er sich in einem anderen Raum als dem Betriebsbereich des Jog Plus-Modus befindet, stellen Sie den Betriebsbereich des Roboters auf „Keine“,damit der Roboter navigiertwerden kann.
Hinweis
Dieses Modul ist im Auto-Modus nicht verfügbar. Durch Tippen auf die Umschalt-Schaltfläche unten rechts wird sie im manuellen Modus verfügbar.
Mit Job Plus (Jog+) können Sie die Knickfunktion gleichzeitig verwenden, während Sie verschiedene Arbeiten ausführen. Dies kann verwendet werden, wenn eine manuelle Steuerung erforderlich ist, um den Roboter während der Programmierung zum Zielpunkt zu bewegen.