
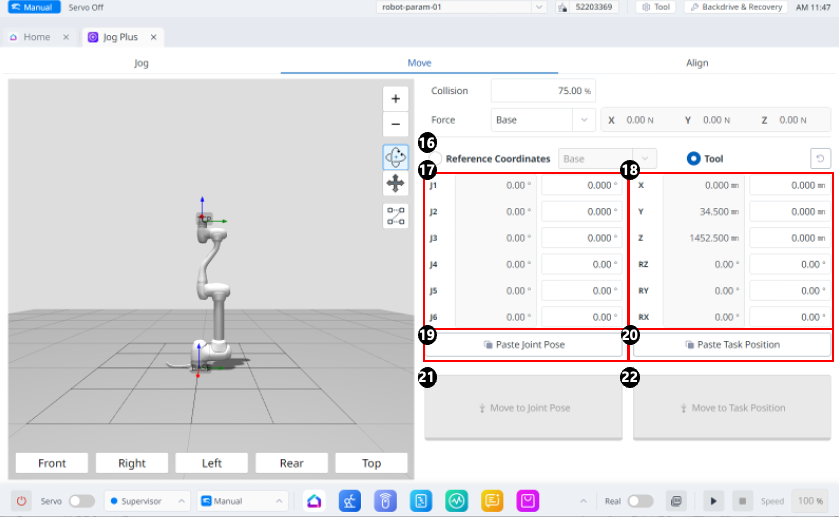
Verschieben-Panel
Menü
Artikel | Beschreibung | |
|---|---|---|
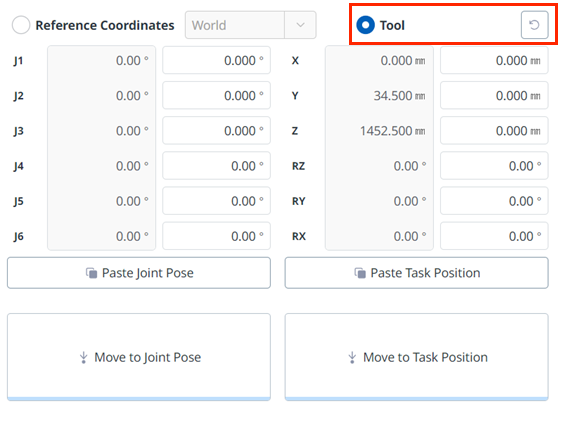
16 | Wählen Sie das Referenzkoordinatensystem aus | Wählen Sie das Referenzkoordinatensystem aus, das für die Aufgabenkoordinaten in Abbildung 18 verwendet werden soll. Sie können Base-, Welt- oder Benutzerkoordinaten wählen. |
17 | Gelenkhaltung | Zeigt die aktuelle Roboterhaltung und die Zielposition des Gelenks an. |
18 | Aufgabenhaltung | Zeigt die aktuelle Roboterhaltung und die Zielposition an, die dem ausgewählten Referenzkoordinatensystem entsprechen. |
19 | Gelenkhaltung Einfügen | Fügen Sie den in die Zwischenablage kopierten Haltungswert in das Fenster für die Gelenkhaltung ein. |
20 | Aufgabenstellung Einfügen | Fügen Sie den in die Zwischenablage kopierten Haltungswert in das Fenster „Aufgabenstellung“ ein. |
21 | Schaltfläche „Gelenk verschieben“ | Mit dieser Schaltfläche bewegt sich der Roboter in die Position des Zielgelenks. |
22 | Schaltfläche „Aufgabe verschieben“ | Mit dieser Schaltfläche bewegt sich der Roboter in die Zielstellung. |
Winkel zum Verschieben einstellen
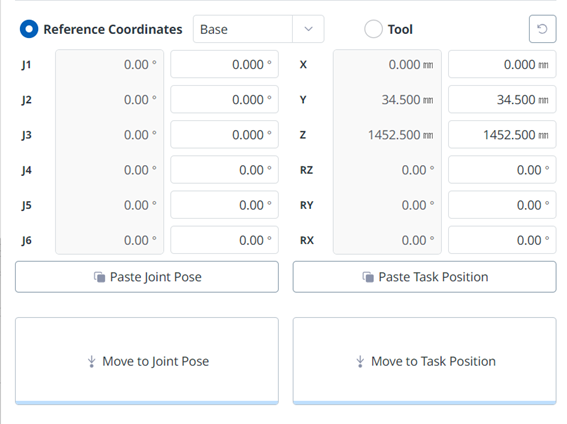
Gehen Sie folgendermaßen vor, um den Roboter in einem bestimmten Winkel zu bewegen:
Wählen Sie die Registerkarte Verschieben.
Geben Sie den Zielwinkel der Roboterverbindung ein. (J4 ist bei Modellen der P-Serie deaktiviert)
Aktivieren Sie den Real-Modus.
Tippen und halten Sie die Schaltfläche zur entsprechenden Gelenkposition verschieben, um den Gelenkwinkel des Roboters anzupassen.
Festlegen der Koordinaten der Basereferenz zum Verschieben
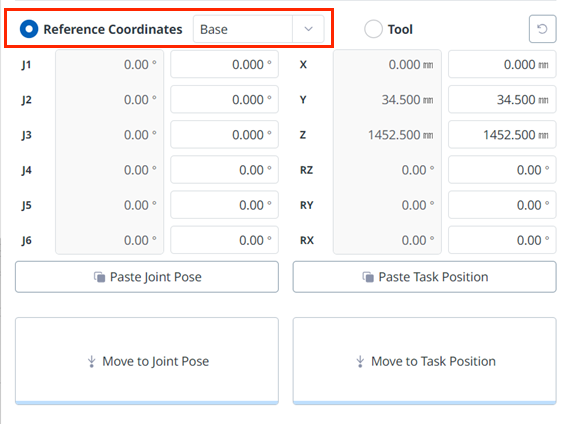
Führen Sie die folgenden Schritte aus, um den Roboter basierend auf seinen Basiskoordinaten zu verschieben:
Wählen Sie die Registerkarte Verschieben und Referenzkoordinaten aus.
Wählen Sie die Anzeigekoordinate als Basis aus.
Halten Sie die Schaltfläche zur entsprechenden Aufgabenstellung verschieben gedrückt, um zu den festgelegten Koordinaten zu gelangen.
Festlegen der zu verschiebenden Referenzkoordinaten der Weltkoordinaten
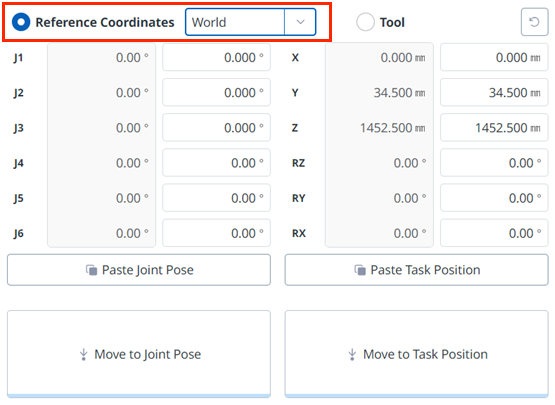
Um den Roboter basierend auf Weltkoordinaten zu bewegen, führen Sie die folgenden Schritte aus:
Wählen Sie die Registerkarte Verschieben und Referenzkoordinaten aus.
Wählen Sie Welt als Anzeigekoordinaten aus, und wählen Sie die Registerkarte Welt aus.
Konfigurieren Sie die Position, die mit Bezug auf die Weltkoordinaten verschoben werden soll.
Halten Sie die Schaltfläche zur entsprechenden Aufgabenstellung verschieben gedrückt, um zu den festgelegten Koordinaten zu gelangen.
Festlegen der Koordinaten, die basierend auf dem Werkzeug verschoben werden sollen
Um den Roboter basierend auf den Werkzeugkoordinaten zu verschieben, führen Sie die folgenden Schritte aus:
Wählen Sie die Registerkarte Verschieben und dann die Registerkarte Werkzeug aus.
Konfigurieren Sie die Position, die mit Bezug auf das Werkzeug bewegt werden soll.
Halten Sie die Schaltfläche zur entsprechenden Aufgabenstellung verschieben gedrückt, um zu den festgelegten Koordinaten zu gelangen.