
Probieren Sie Force command samples aus
Vorsicht
Bevor Sie die Probe testen, müssen Sie Vorsichtsmaßnahmen. Weitere Informationen finden Sie in TEIL 1. Sicherheitshandbuch.
Hinweis
Für dieses Beispiel ist die Task Writer-Datei erforderlich, die in Probieren Sie Compliance command samples aus
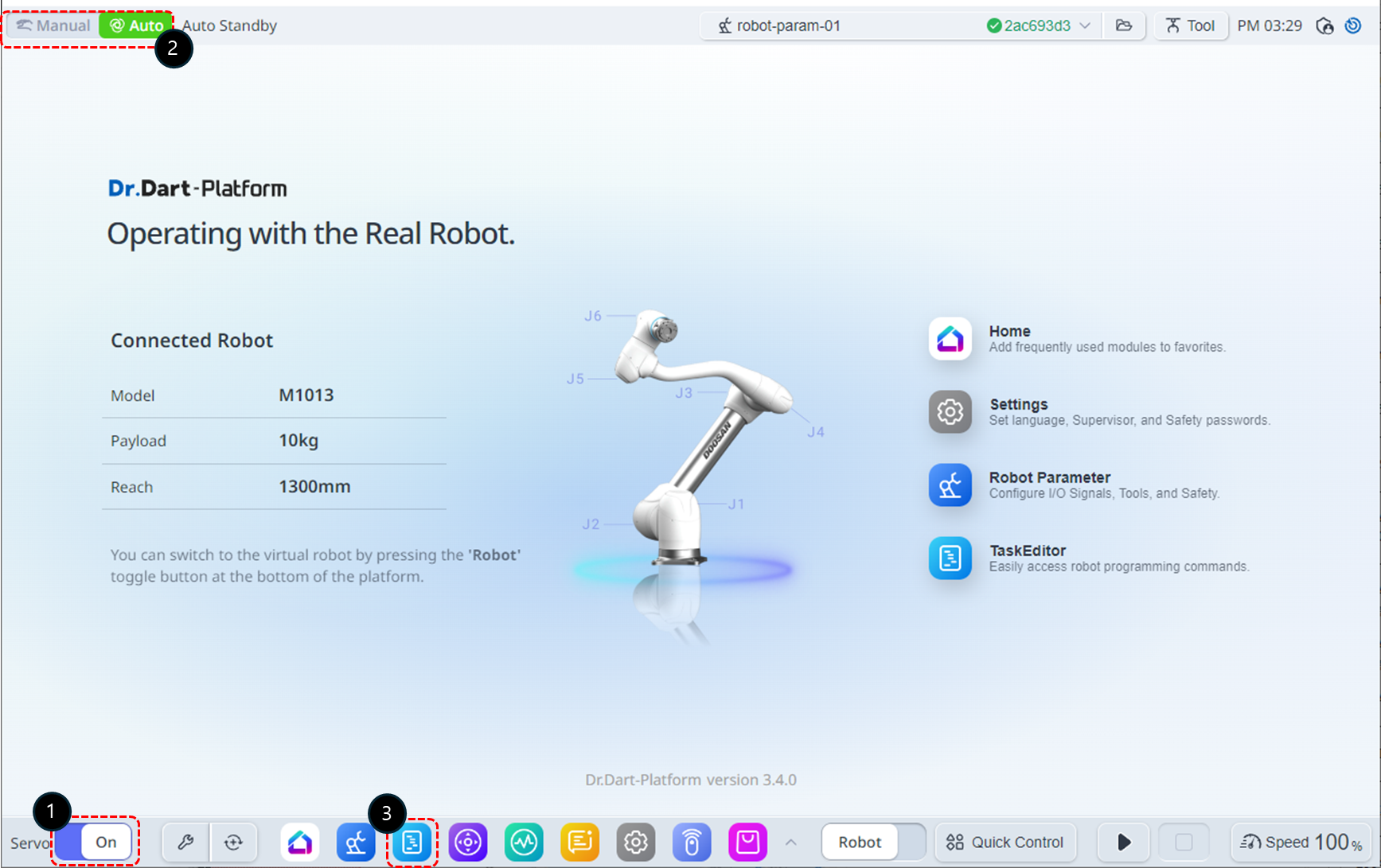
Ändern Sie den Servo-Status auf ein.
Schalten Sie den Betriebsmodus auf manuell um.
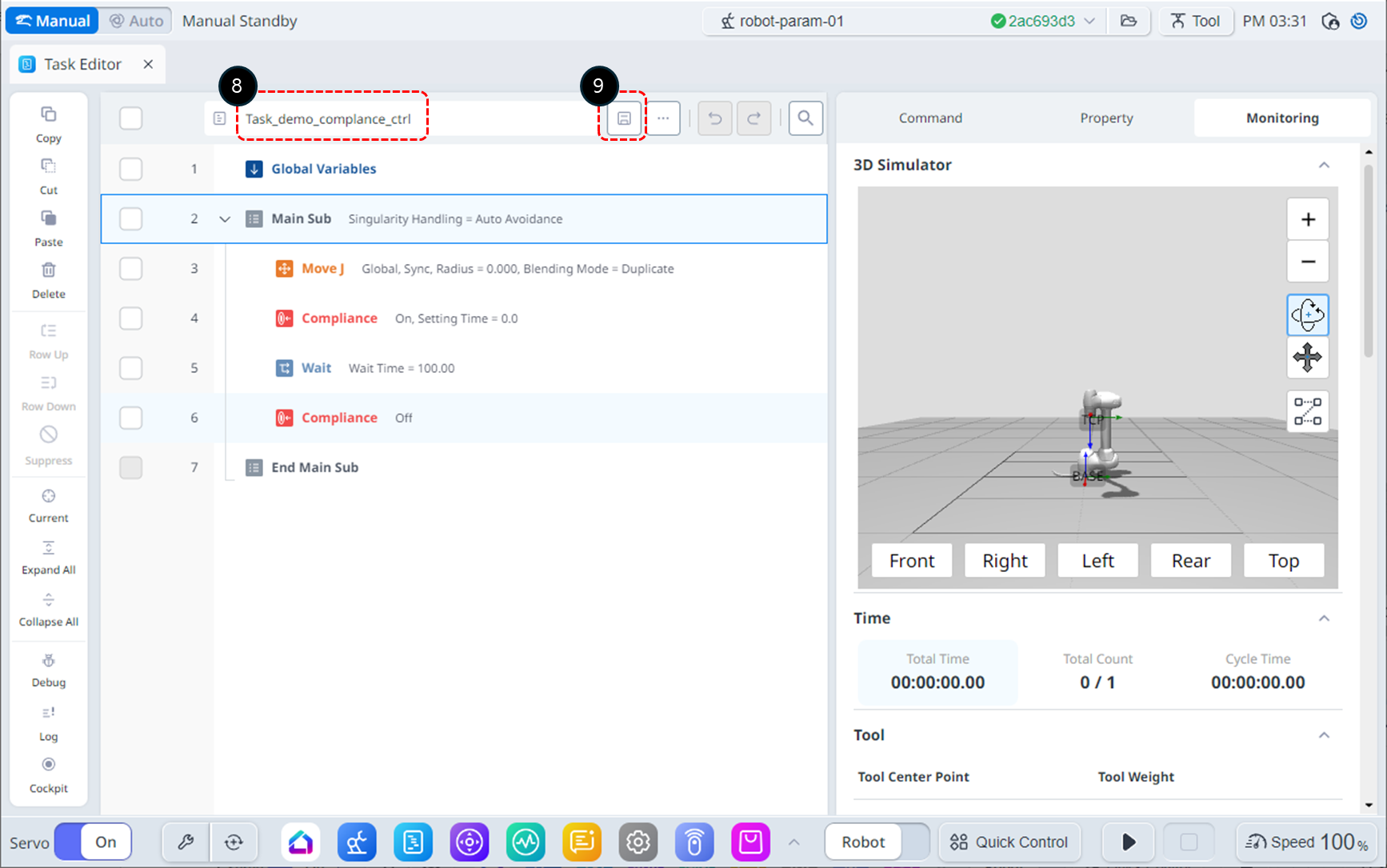
Wählen Sie im unteren Menü das Modul Task Editor aus.
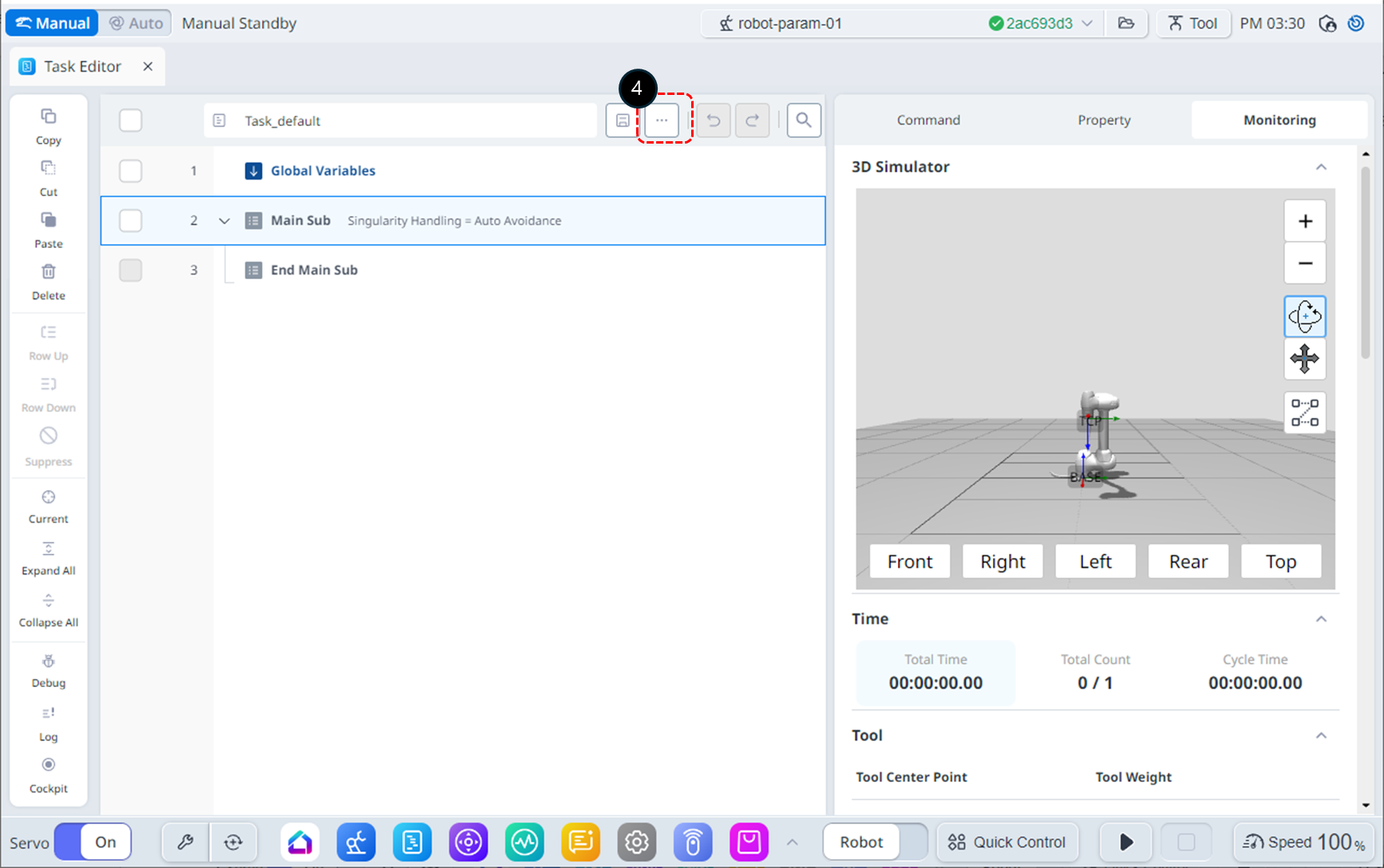
Klicken Sie auf die Schaltfläche Datei.
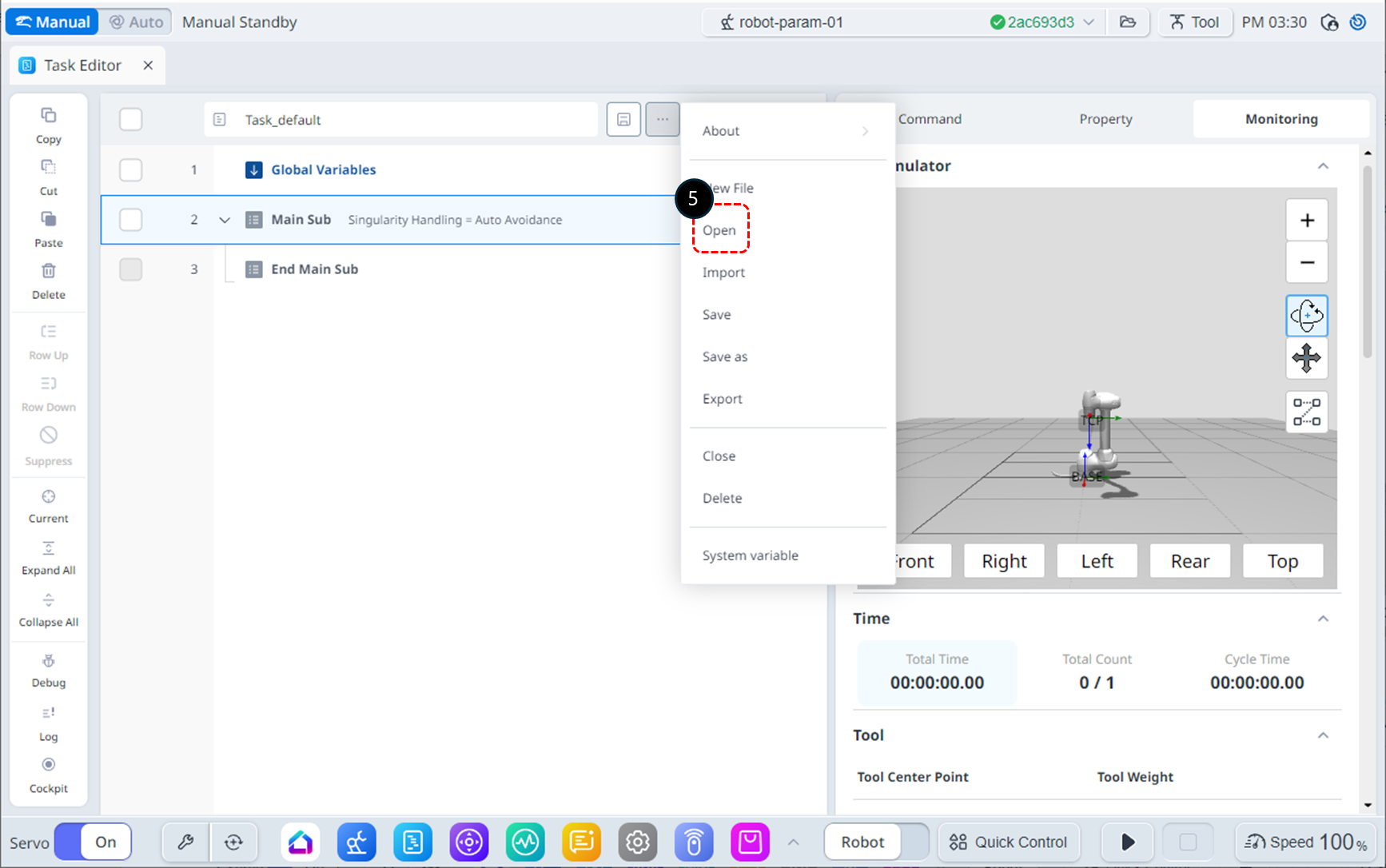
Klicken Sie auf die Schaltfläche Öffnen.
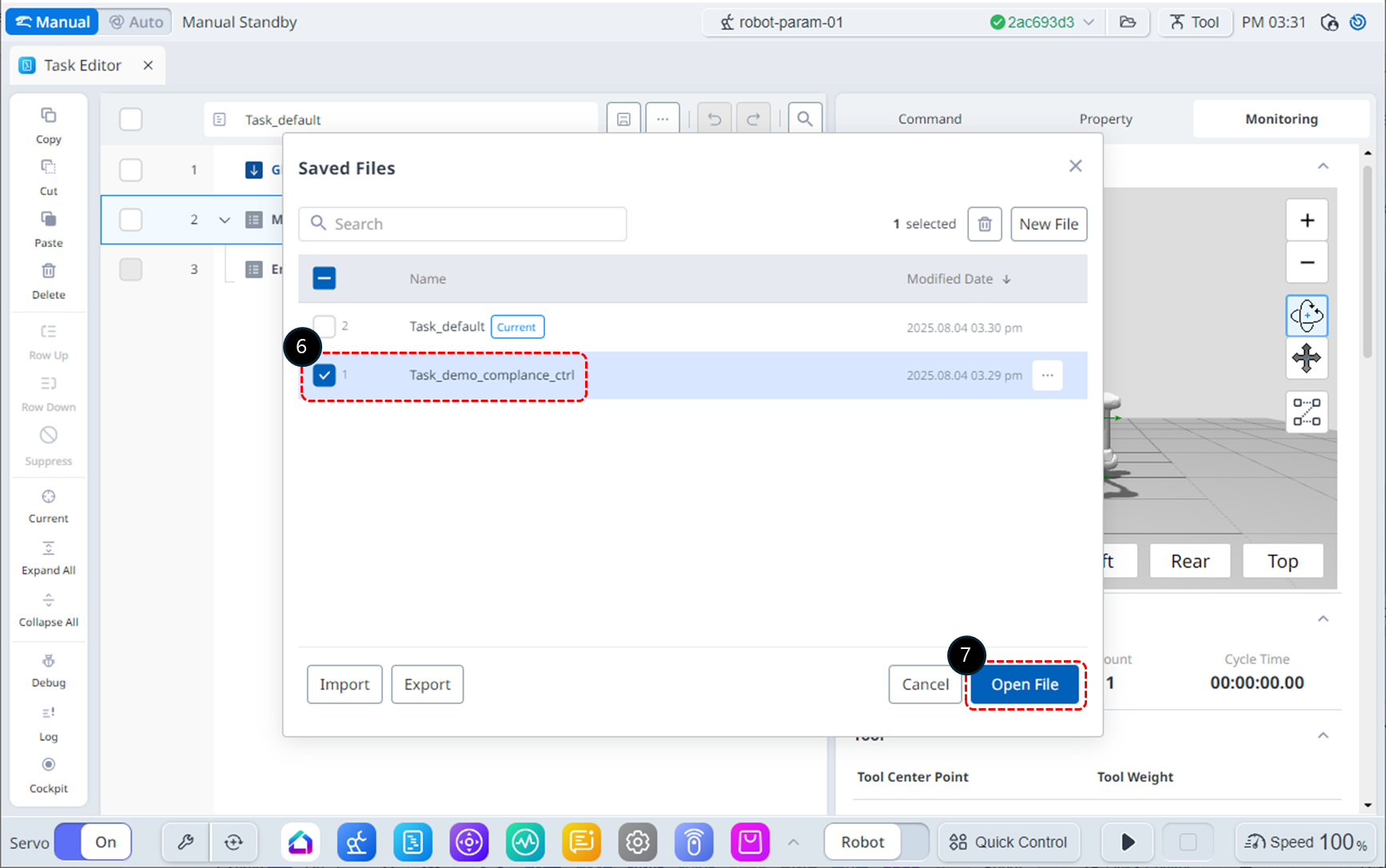
Wählen Sie die Datei Task_demo_compliance_ctrl aus, die in den Probieren Sie Compliance command samples aus.
Klicken Sie auf die Schaltfläche Datei öffnen.
Benennen Sie die Datei in Task_demo_force_ctrl um.
Klicken Sie auf die Schaltfläche Speichern, um den Dateinamen zu speichern.
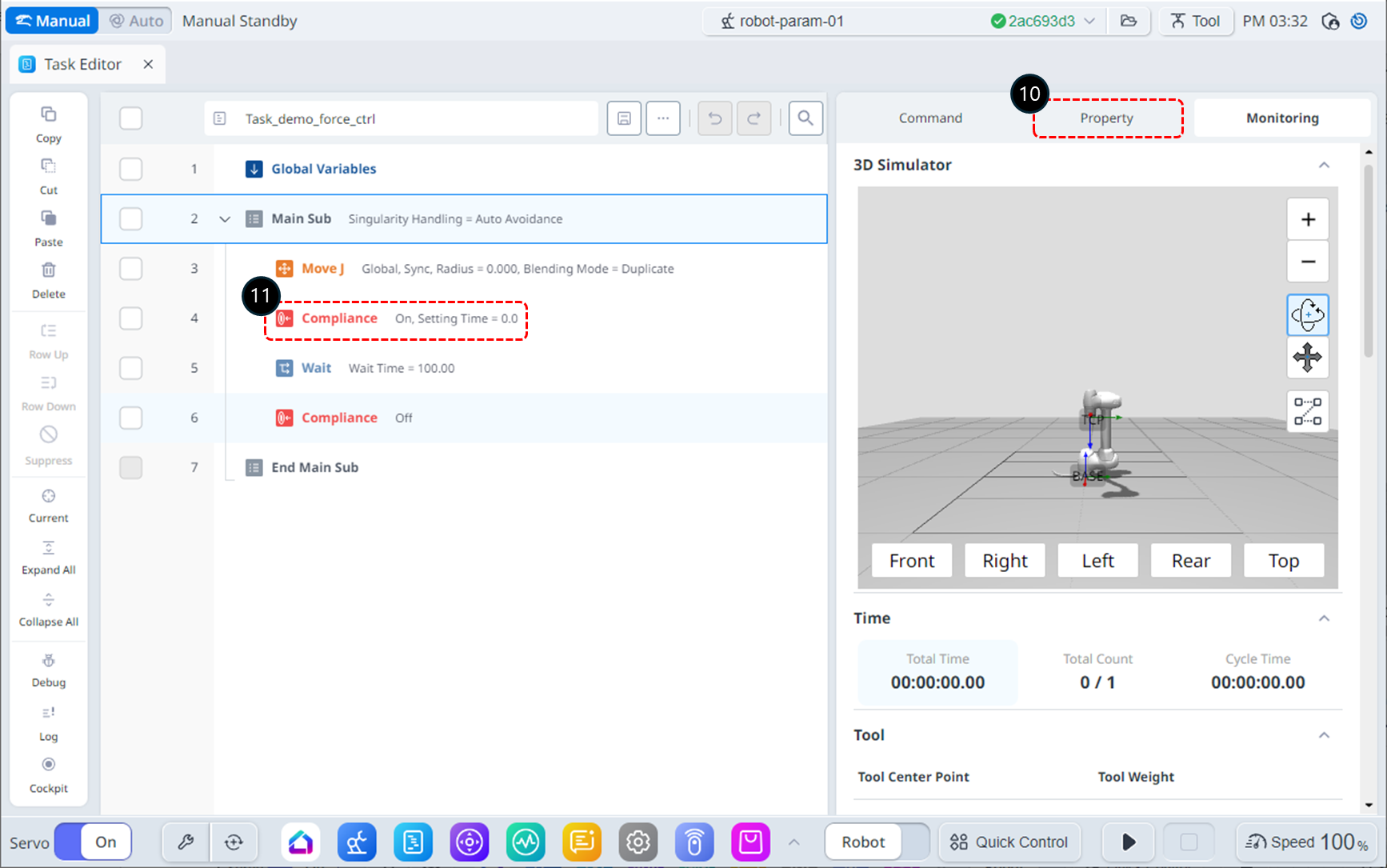
Wählen Sie die Registerkarte Eigenschaft aus.
Wählen Sie in der vierten Zeile den Befehl Compliance.
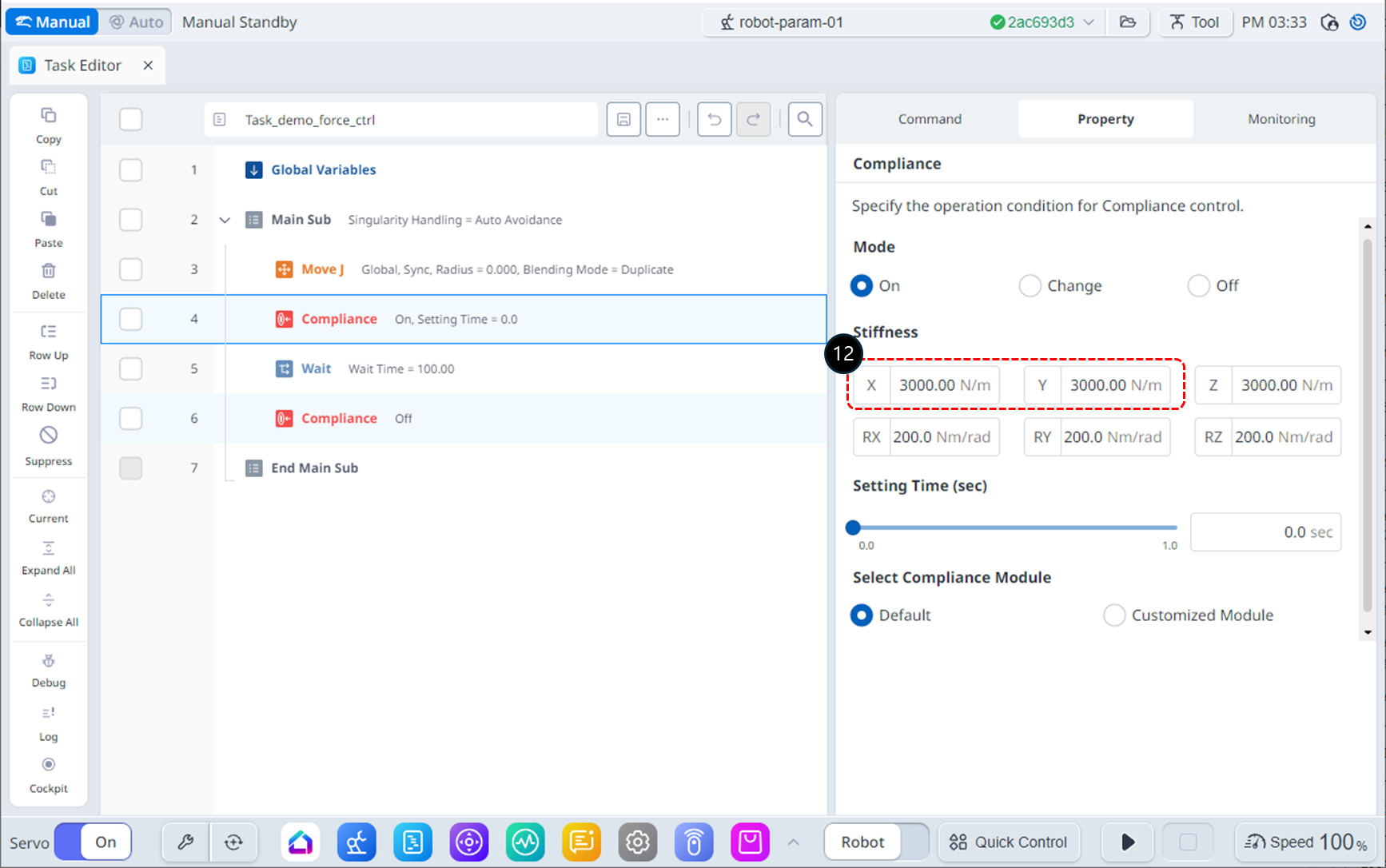
Legen Sie die Steifigkeit wie folgt auf die Standardwerte fest.
X, Y, Z : 3000 N/m (Standard)
Rx, Ry, Rz : 200 Nm/Rad (Standard)
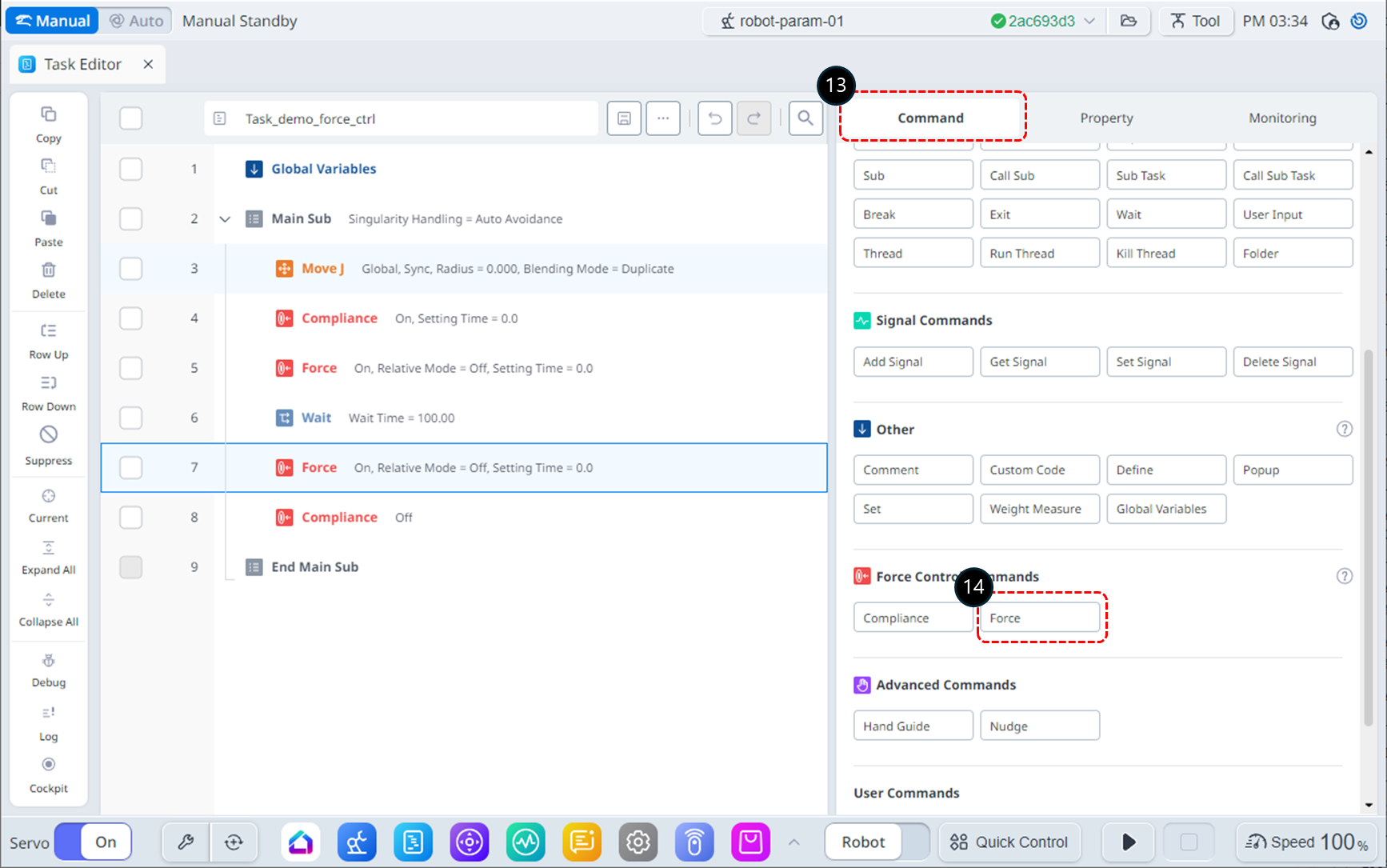
Wählen Sie die Registerkarte Befehl aus.
Fügen Sie der 5. Und 7. Linie einen Befehl Force hinzu. Diese Befehle werden zum Aktivieren und Deaktivieren der Forcesteuerung verwendet.
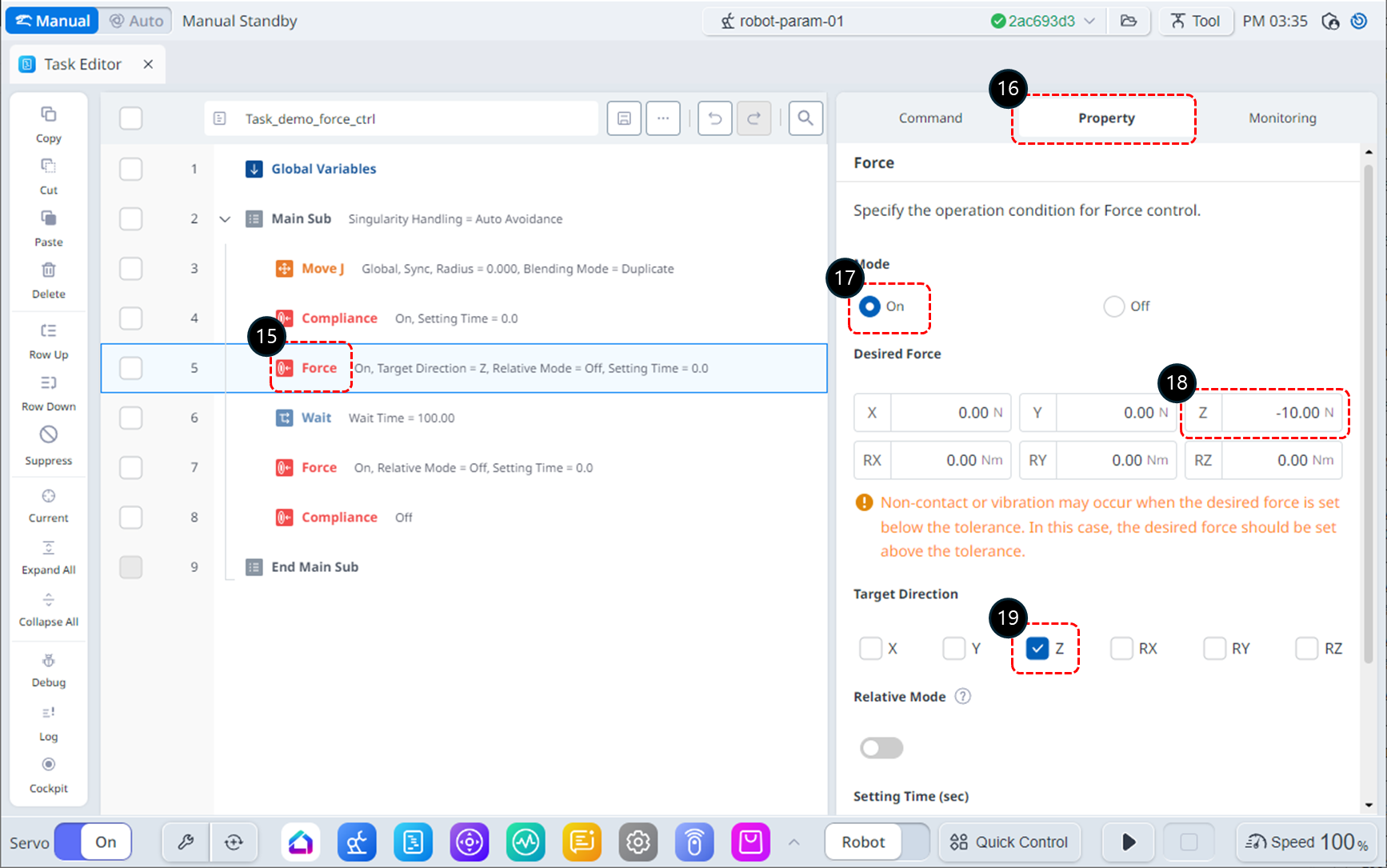
Wählen Sie den Befehl Force (Kraft) auf der 5. Linie aus.
Wechseln Sie zur Registerkarte Eigenschaft.
Stellen Sie den Modus wie folgt ein: Modus ein aktiviert die Forcesteuerung.
Modus: Ein
Legen Sie die gewünschte Kraft wie folgt fest.
X : 0 N (Standard)
Y : 0 N (Standard)
Z : -10 N
Rx, Ry, Rz : 0 Nm/Rad (Standard)
Aktivieren Sie in der Zielrichtung nur die z-Achse.
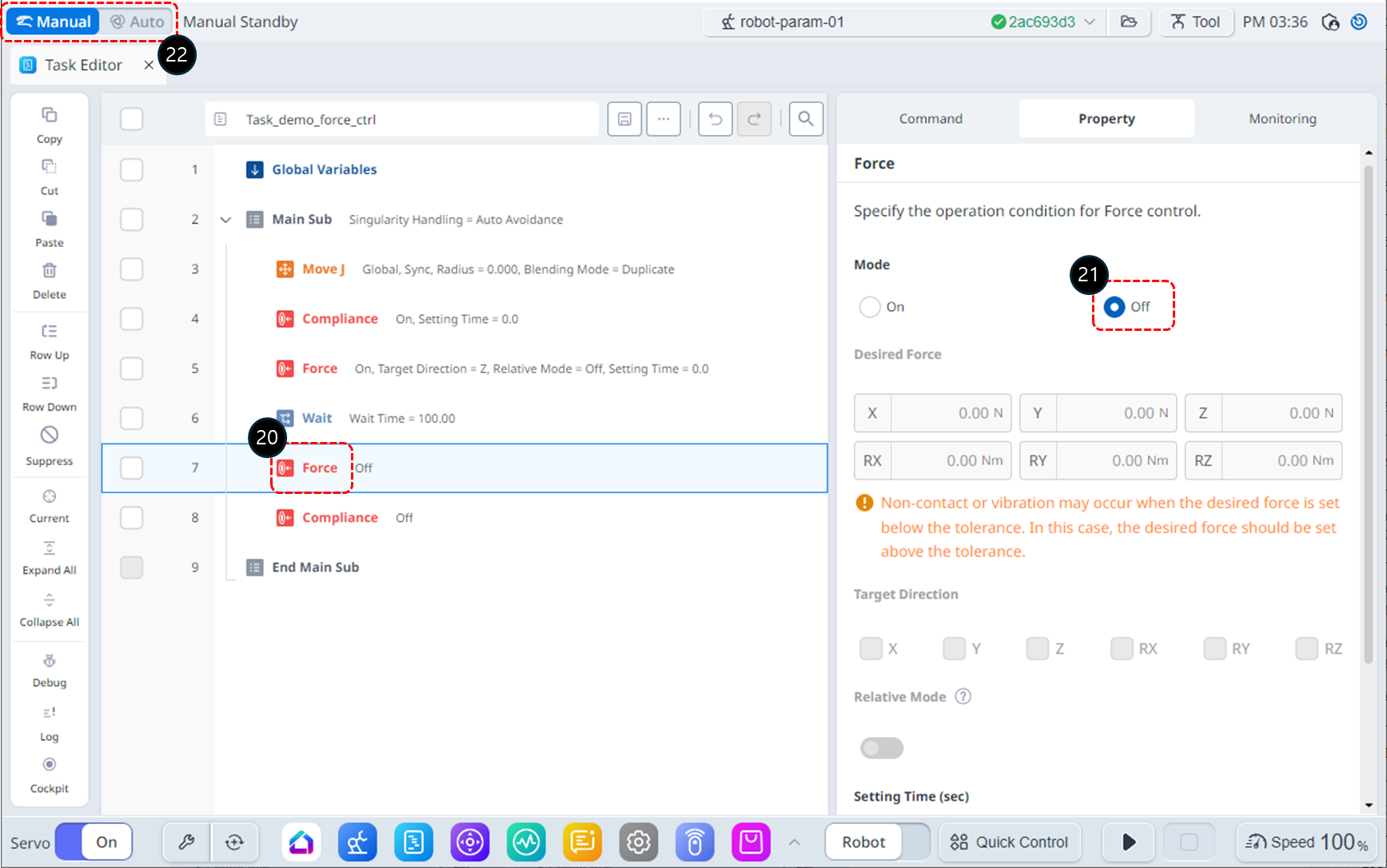
Wählen Sie in der Aufgabenliste den Befehl Force in Zeile 7 aus.
Stellen Sie den Modus wie folgt ein: Modus aus deaktiviert die Forcesteuerung.
Modus: Aus
Schalten Sie den Betriebsmodus auf Auto. Die Registerkarte Eigenschaft wechselt automatisch zur Registerkarte Überwachung.
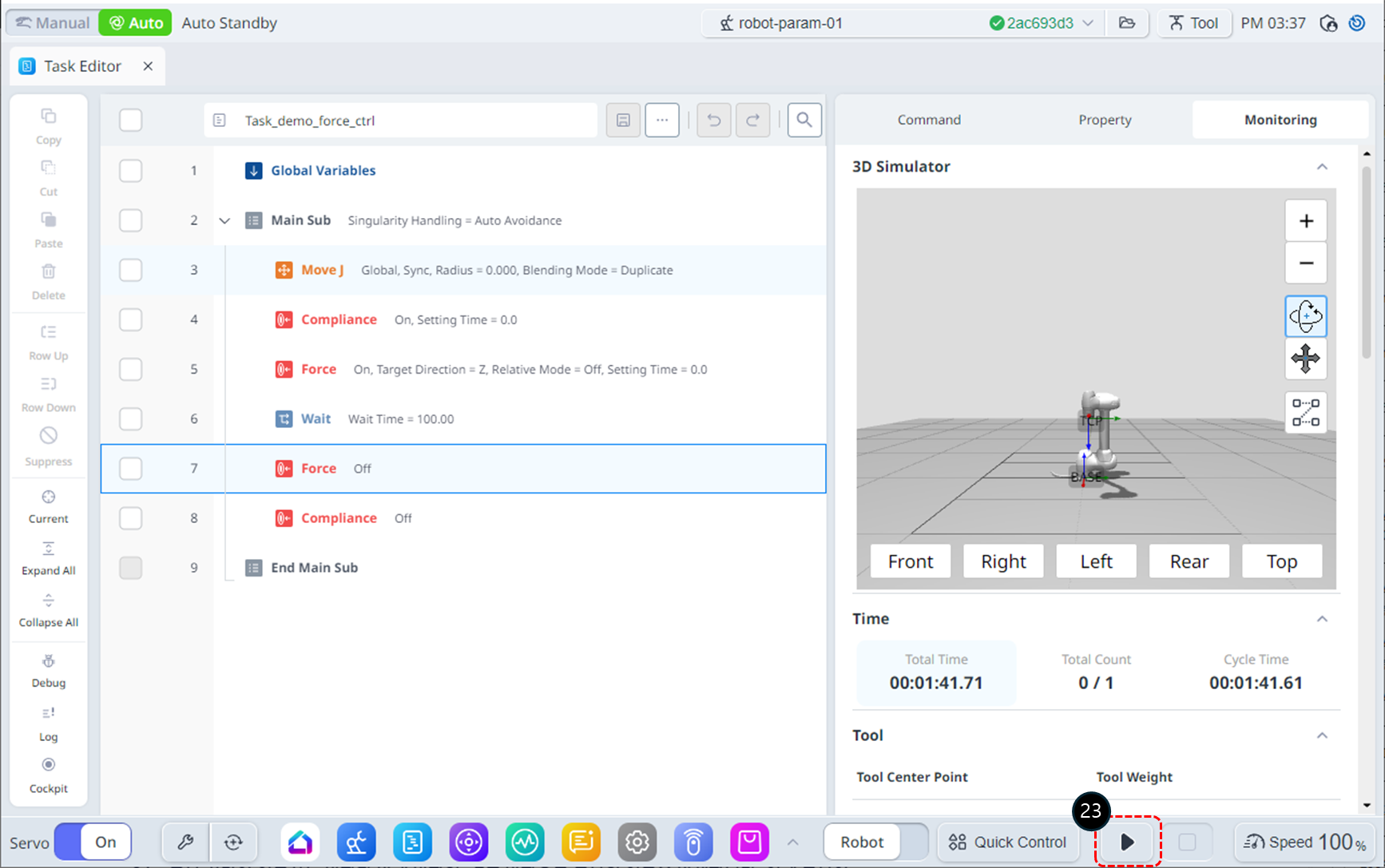
Klicken Sie auf die Schaltfläche Ausführen. Im Status Warten arbeitet der Roboter wie folgt:
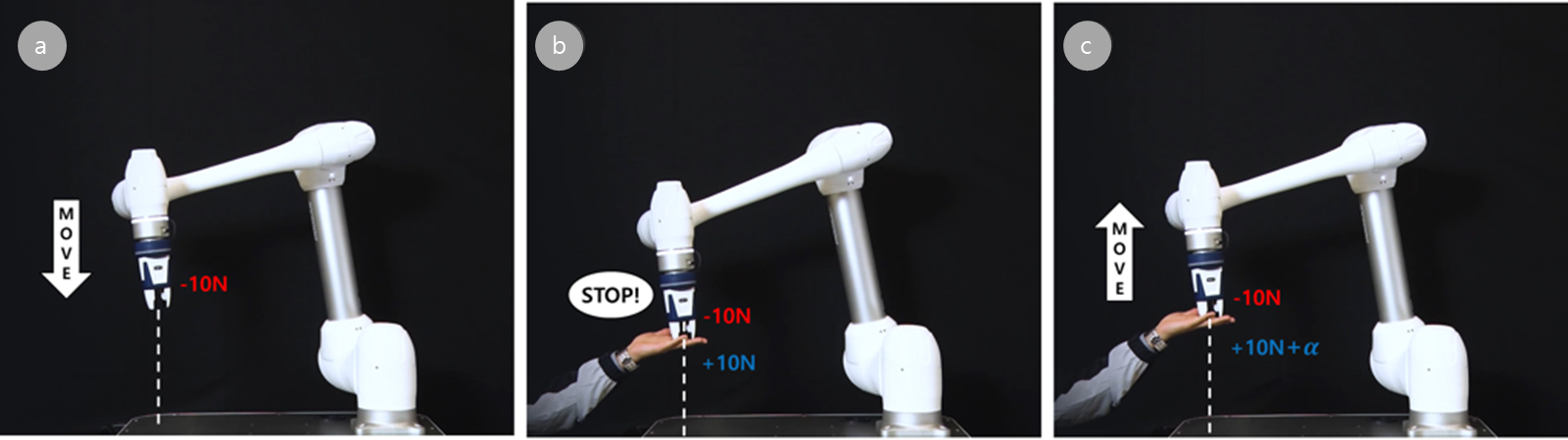
Eine Kraft von -10 N wird am Endeffektor des Roboters angewendet, wodurch sich der Roboter langsam in die -Z-Richtung bewegt.
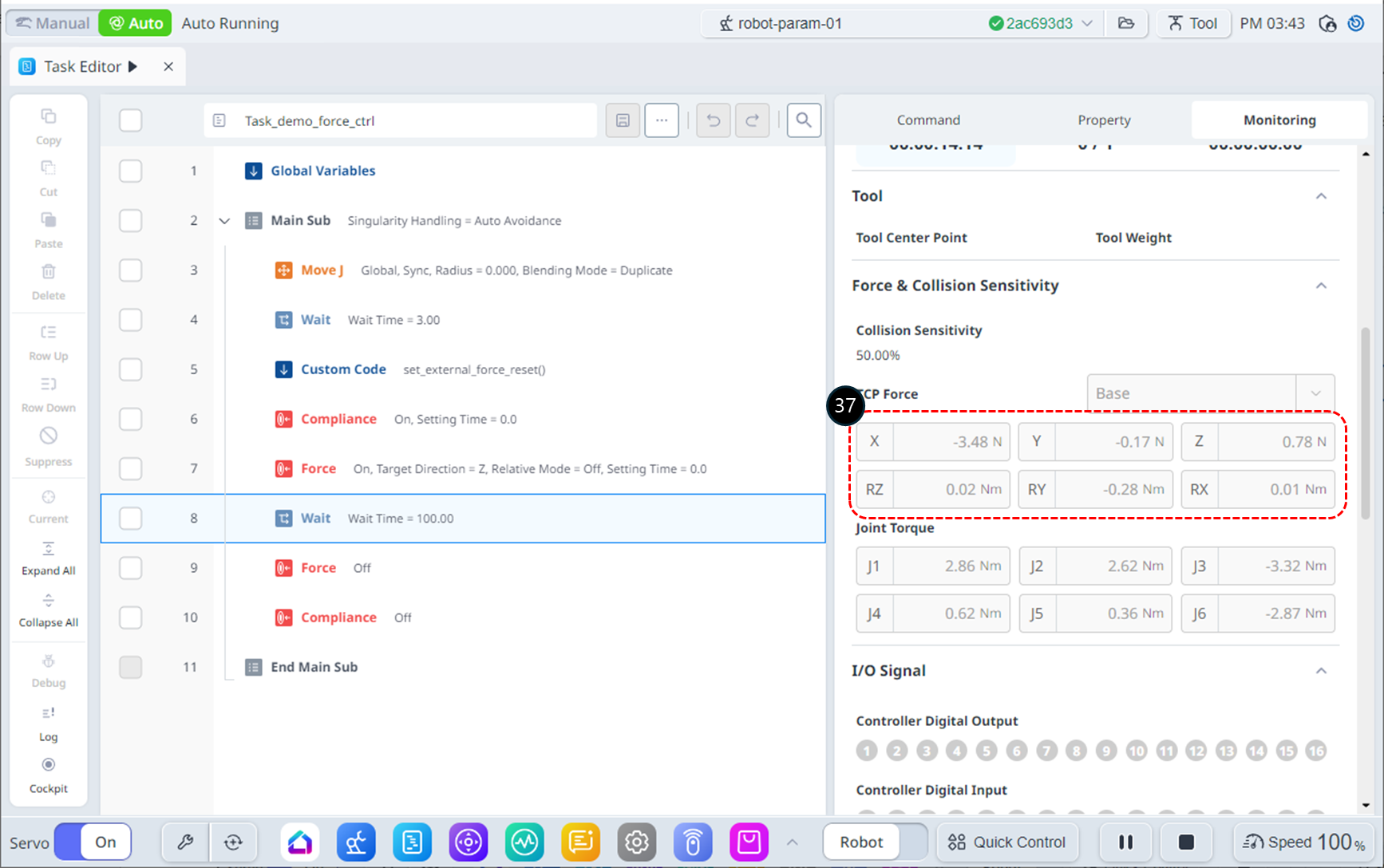
Wenden Sie eine Gegenkraft in +Z-Richtung an, die der Bewegung des Roboters entgegensteht. Wenn die vom Roboter ausgeübte Kraft und die entgegengesetzte Kraft ausgeglichen sind, scheint der Roboter seine Position zu halten, als ob er stationär wäre.
Wenn auf den Roboter eine Kraft von mehr als +10N angewendet wird, bewegt er sich in Richtung der angewendeten Kraft.
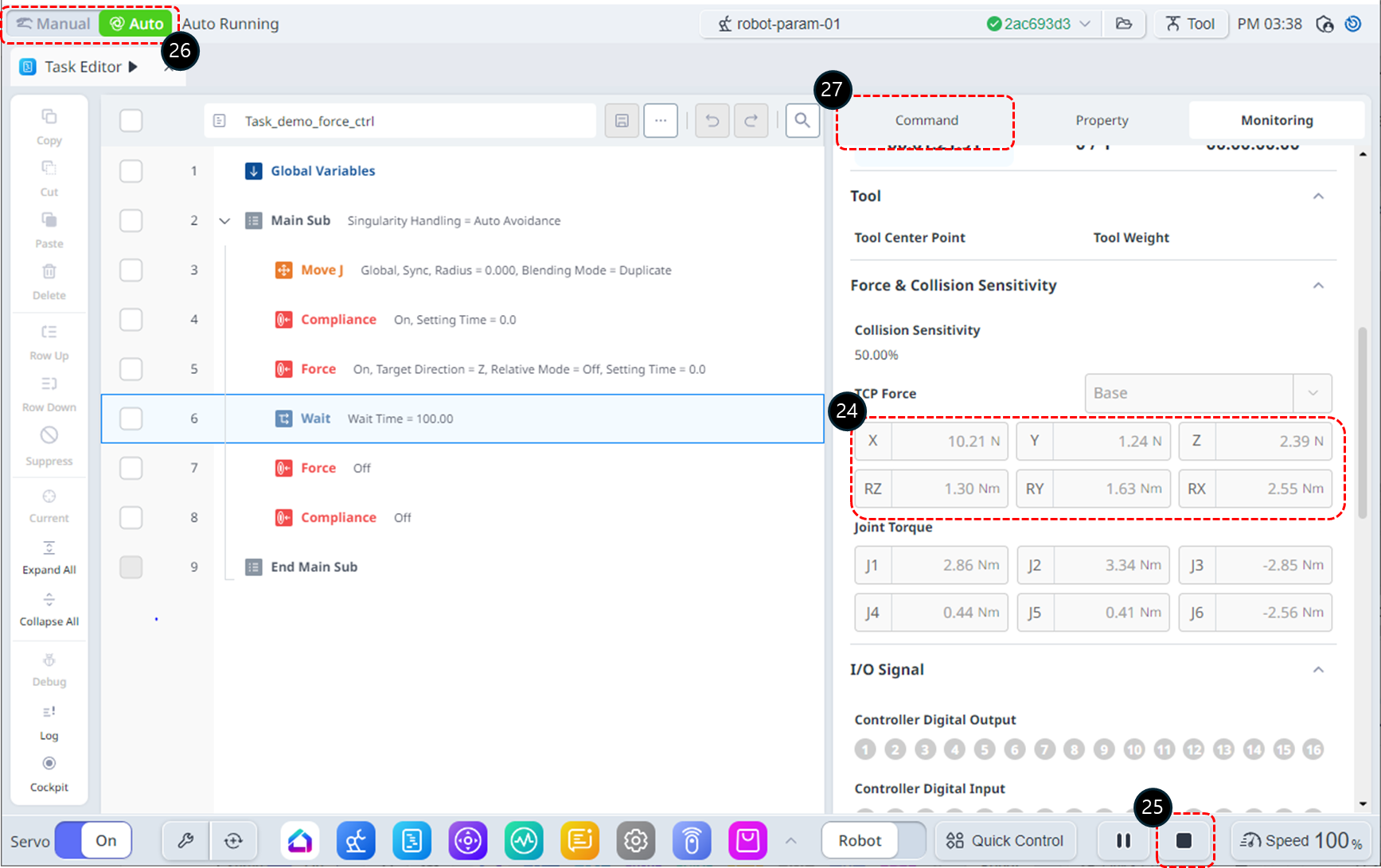
Während des Betriebs können Sie die Echtzeit-TCP-Kraft im Abschnitt TCP Force der Registerkarte Überwachung überwachen. Wenn keine Kraft auf den Endeffektor des Roboters angewendet wird, sollten alle TCP-Force-Werte 0 sein, es kann jedoch vorkommen, dass Fehlerkomponenten angezeigt werden. Im Folgenden finden Sie eine zusätzliche Erklärung zur Behebung dieses Problems.
Klicken Sie auf die Schaltfläche Stopp, um die Aufgabe zu beenden.
Den Betriebsmodus für die Aufgabenänderung auf manuell umschalten.
Wählen Sie die Registerkarte Befehl aus.
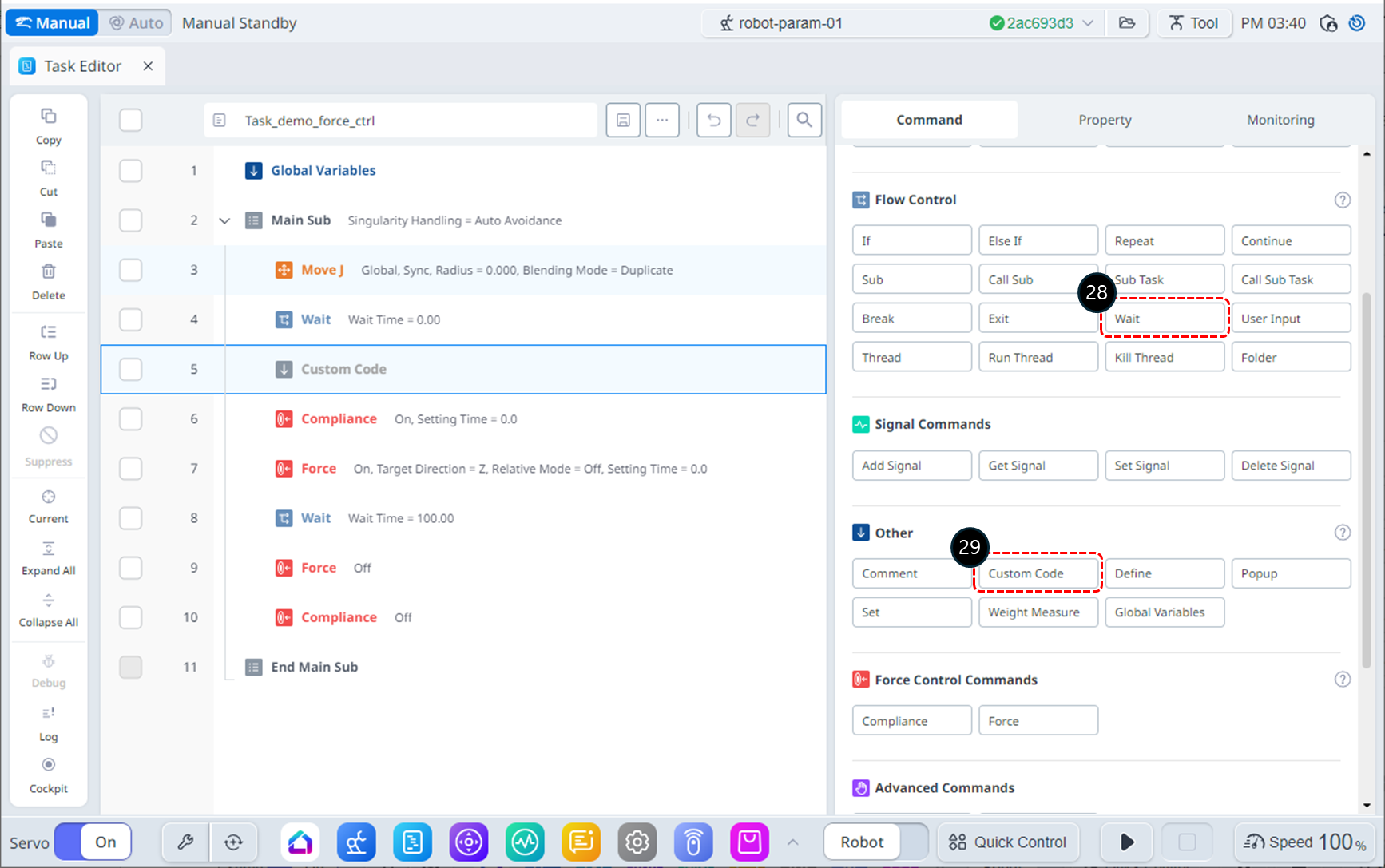
Fügen Sie in Zeile 4 der Aufgabenliste einen Befehl Warten hinzu.
Fügen Sie in Zeile 5 der Aufgabenliste einen benutzerdefinierten Code-Befehl hinzu.
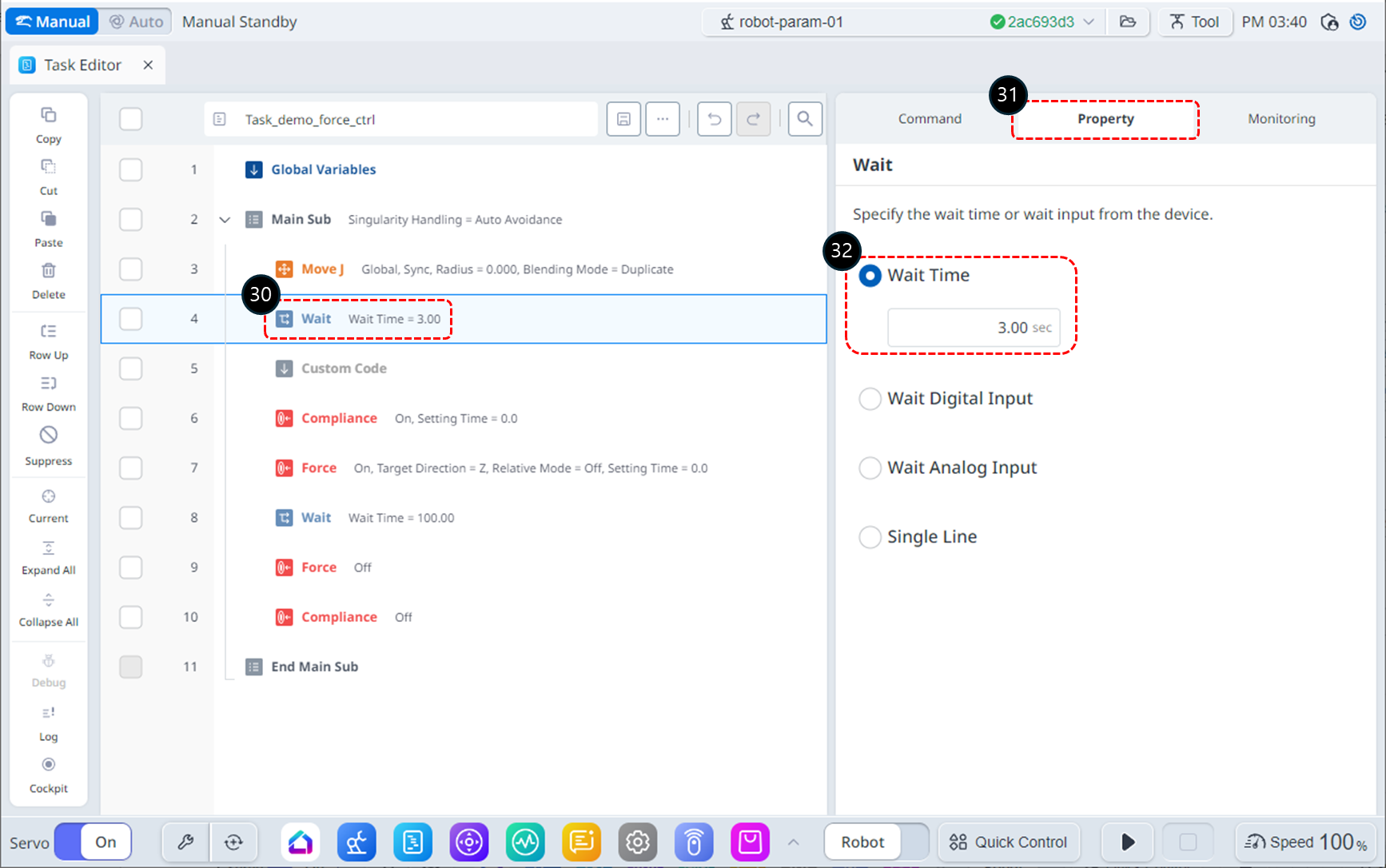
Wählen Sie den Befehl Warten in Zeile 4 aus.
Wählen Sie die Registerkarte Eigenschaft aus.
Stellen Sie die Wartezeit wie folgt ein.
Wartezeit : 3 Sek
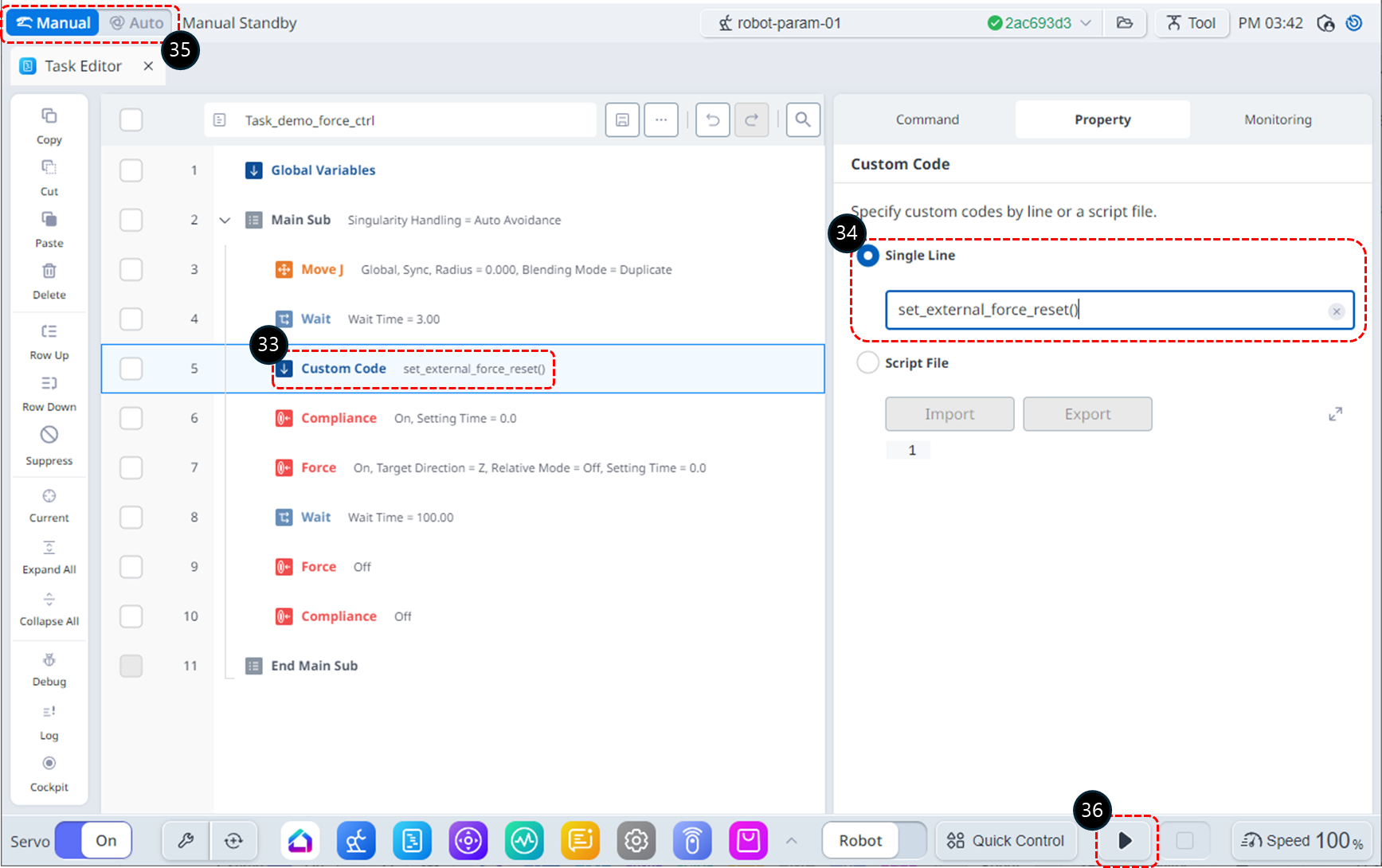
Wählen Sie den Befehl Benutzerdefinierter Code in Zeile 5 aus.
Wählen Sie eine Zeile, und fügen Sie den folgenden DRL-Befehl hinzu: Dieser Befehl setzt die Werte des externen Kraftsensors zurück, um Fehler zu entfernen.
set_externl_force_reset()
Schalten Sie den Betriebsmodus auf Auto. Die Registerkarte Eigenschaft wechselt automatisch zur Registerkarte Überwachung.
Klicken Sie auf die Schaltfläche Ausführen.
Prüfen Sie auf der Registerkarte Überwachung die TCP Force-Werte. Sie werden feststellen, dass der Fehler im Vergleich zu vor der Verwendung des Befehls set_external_force_reset() reduziert wurde.