
Sicherheitsrelevante Stopp-Funktion
Sicherheitsfunktion | Auslösebedingung Für Sicherheitsfunktion Auslösendes Ereignis | Beabsichtigte Aktion Beabsichtigtes Ergebnis | PFHd | PL, SIL | |
|---|---|---|---|---|---|
| 1 | Not-Aus | Wenn der mit dem TBSFT EM-Terminal verbundene Notausschalter gedrückt wird Wenn der Not-aus-Schalter des Programmierhandgeräts gedrückt wird | Der Notstopp wird gemäß dem konfigurierten Not-aus-Modus aktiviert.
| 2,87E-8 /h | PL e Cat. 4 SIL 3 |
| 2 | Schutzstopp | Wenn die Schutzausrüstung, die mit dem PR-Terminal des TBSFT verbunden ist, aktiviert ist, | Der Notstopp wird gemäß dem konfigurierten Not-aus-Modus aktiviert.
| 4,63E-7 /h | PL d Cat. 3 SIL 2 |
Wiederaufnahme der Arbeit nach einem Schutzstopp
Wenn sich der Werkzeugmittelpunkt (TCP) des Roboters innerhalb der Collaborative Zone befindet und die Funktion Nudge aktiviert ist, kann der Benutzer direkt Kraft auf den Roboter (Nudge) anwenden, um die Arbeit fortzusetzen. Weitere Informationen finden Sie unter Festlegen der Collaborative Zone und Nudge.
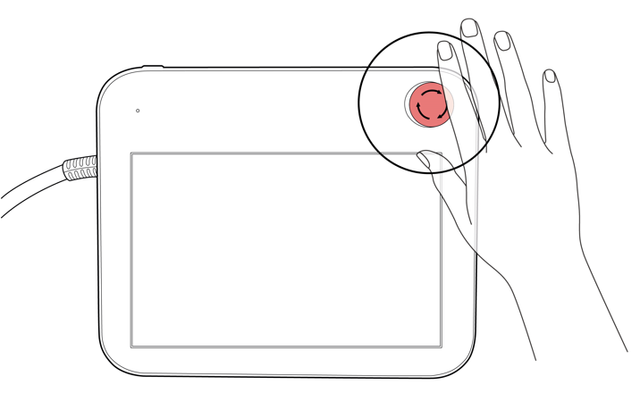
Not-Aus
Der Not-aus-Taster ist verfügbar, um das System im Notfall zu stoppen. Drücken Sie in Notsituationen die Not-aus-Taste in der oberen rechten Ecke des Programmierhandgeräts, um das System sofort anzuhalten.
Hinweis
Not-aus-Schalter sollten als ergänzende Schutzmaßnahme und nicht als Schutzmaßnahme verwendet werden.
Der Sicherheitsstopp-Modus für den Not-aus ist standardmäßig auf Safe Stop 1 (SS1) eingestellt.
Zusätzliche Not-aus-Taster können installiert werden, wenn dies aufgrund der Bewertung des Risikos für die Roboteranwendung erforderlich ist.
Der Not-aus-Taster muss IEC 60947 entsprechen.
Wenn ein Not-aus über den in Sicherheits-E/A eingestellten Port ausgelöst wird, wird die Schaltfläche aktiviert, die auf den Bildschirm für Sicherheitseingabe am unteren Rand des Popup-Fensters Not-aus zugreifen kann.
Schutzstopp
Der Roboter verfügt außerdem über eine „Protective Stop“-Funktion, die den Roboter mit druckempfindlichen Schutzausrüstungen wie Sicherheitsmatten oder elektroempfindlichen Schutzausrüstungen wie Lichtvorhang-Laserscannernstoppen kann.
Weitere Informationen zum Anschließen von Schutzvorrichtungen finden Sie unter Einstellen des Anschlussklemmenblocks für den Kontakteingang (TBSFT) und Konfigurieren der konfigurierbaren digitalen E/A (TBCI1 - 4, TBCO1 - 4).