Arbeitsbereichsgrenze und Einstellungen von Zonen
Gemeinsam
Der effektive Bereich kann als Innen-/Außenbereich ausgewählt werden.
Der Formtyp kann als Kugel, Zylinder, Quader, geneigter Quader oder Rahmen mit mehreren Ebenen ausgewählt werden. Weitere Informationen finden Sie unter Übersicht über die Einstellungen für Arbeitsbereichsgrenze und Zone.
Einstellung Für Arbeitsbereichsgrenze
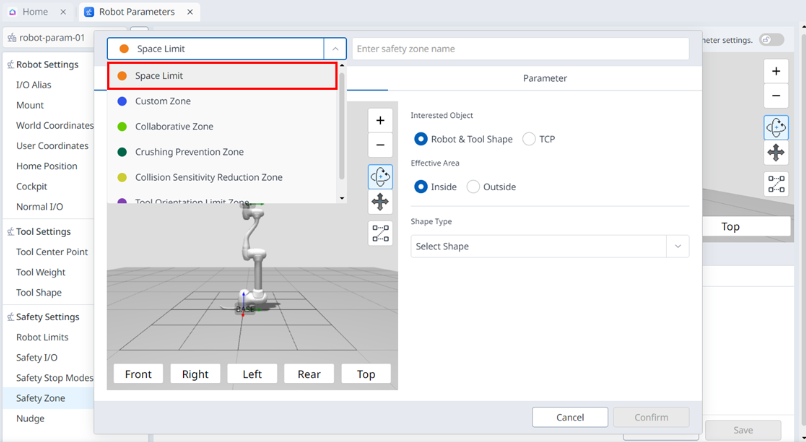
Die Arbeitsbereichsgrenze ist eine Funktion, die einen virtuellen Zaun im äußersten Bereich des Roboters festlegt. Sie können den Roboter bedienen, ohne eine Arbeitsbereichsgrenze festzulegen. Es wird jedoch empfohlen, eine Arbeitsbereichsgrenze für eine sichere Verwendung festzulegen.
Sie können sie festlegen, indem Sie unter Robot Parameters > Sicherheitsbereich > Hinzufügen > links oben im Popup-Fenster „Arbeitsbereichsgrenze“ auswählen.
Sie können eine der Optionen Roboter- und Werkzeugform/TCP für das interessierte Objekt auswählen.
Der Roboter muss sich innerhalb des Bereichs befinden, der für die normale Einstellung festgelegt wurde.
Hinweis
Abhängig davon, wie Sie es einstellen, existiert der Standardwert der Raum-Erweiterung.
Einstellung der Werkzeugform bei Auswahl von „TCP“ für die Prüfung, TCP-Randwert 0 mm
Einstellung der Werkzeugform bei Auswahl von „Roboter- und Werkzeugform“ für die Prüfung, TCP-Randwert 0 mm
Werkzeugform nicht festgelegt, bei Auswahl von „TCP“ für die Prüfung TCP-Randwert 0 mm
Werkzeugform nicht festgelegt. Bei Auswahl von „Roboter- und Werkzeugform“ für die Prüfung wird der TCP-Randwert 60 mm angegeben
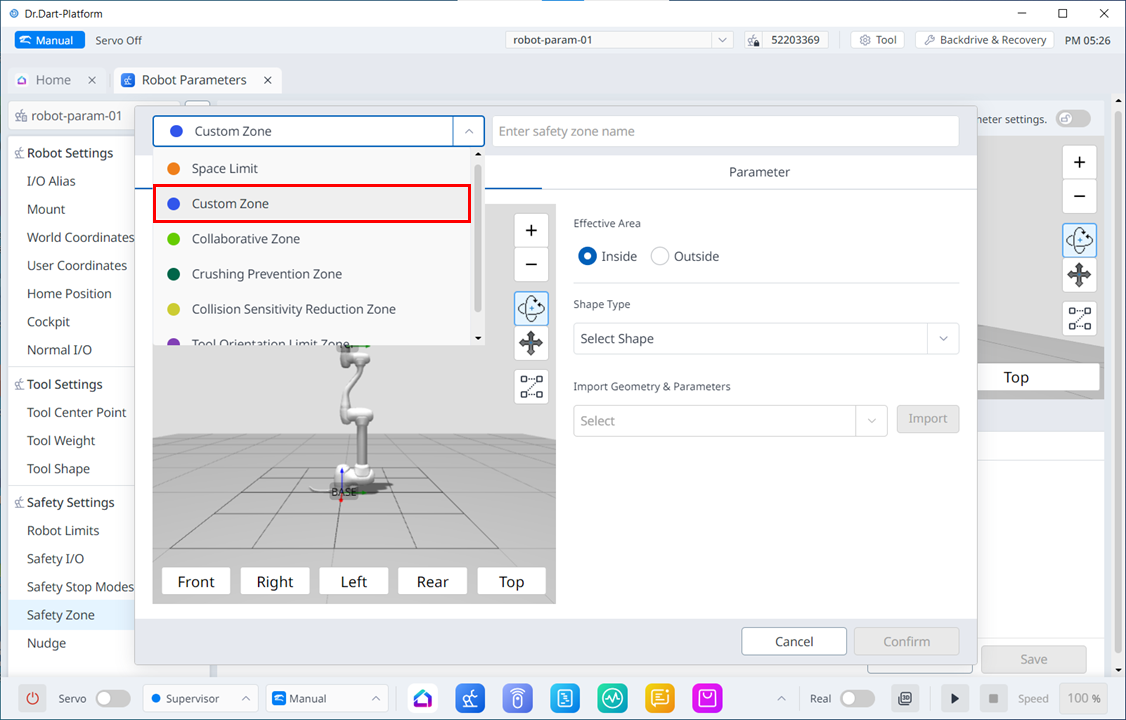
Festlegen der benutzerdefinierten Zone
Benutzerdefinierte Zone ist die flexibelste Sicherheitszone, in der Sie Sicherheitsparameter frei einstellen können. Sie können alle Einstellungen wie Robotergrenzen, sicherer Stopp-Modus, Gelenkgeschwindigkeit und Winkelbegrenzungen entsprechend Ihren Anforderungen konfigurieren.
Sie können ihn einstellen, indem Sie unter Robot Parameters > Sicherheitsbereich > Hinzufügen > Popup links oben die Option „Benutzerdefinierte Zone“ auswählen.
Hinweis
Wenn sich TCP in einer Position befindet, in der sich mehrere Bereiche überschneiden, gelten die folgenden Regeln einzeln für jede Sicherheitsfunktion.
Normalmodus
Wenn keine Zonen auf high priority zones eingestelltsind, ist der am weitesten eingeschränkte Sicherheitsgrenzwert der sich überschneidenden Zonen der Referenzwert für die Inspektion.
Wenn eine Zone als a high priority zone festgelegtist, ist der Grenzwert für diese Zone der Referenzwert für die Inspektion.
Wenn mehr als zwei Zonen als igh priority zones festgelegtsind, sind die Prüfkriterien der am weitesten gelockerte Sicherheitsgrenzwert der Zonen.
Modus Verringern
Wenn keine Zonen auf high priority zones eingestelltsind, ist der am weitesten eingeschränkte Sicherheitsgrenzwert der sich überschneidenden Zonen der Referenzwert für die Inspektion.
Wenn eine Zone auf a high priority zone gesetztist, bestimmt die Option Überschreiben für diese Zone den Referenzwert für die Prüfung.
Wenn die Option „Überschreiben“ nicht aktiviert ist, ist der am weitesten begrenzte Sicherheitsgrenzwert zwischen der Zone mit hoher Priorität und dem global reduzierten Grenzwert der Referenzwert für die Inspektion.
Wenn die Option „Überschreiben“ aktiviert ist, ist die Zone mit hoher Priorität der Referenzwert für die Prüfung.
Wenn mehrere Zonen auf eine Zone mit hoher Priorität gesetztsind, bestimmt die Überschreibungsoption für diese Zone den Referenzwert für die Prüfung.
Wenn die Option „Übergehen“ für keine der Zonen mit hoher Priorität aktiviertist, sind die Zone mit der höchsten Priorität, für die die Option „Übergehen“ nicht aktiviert ist, und der höchstzulässige Sicherheitsgrenzwert des global reduzierten Grenzwerts der Referenzwert für die Inspektion.
Wenn die Option „Übergehen“ für alle Zonen mit hoher Priorität aktiviertist, sind die Prüfkriterien der am weitesten gelockerte Sicherheitsgrenzwert unter den Zonen mit hoher Priorität.
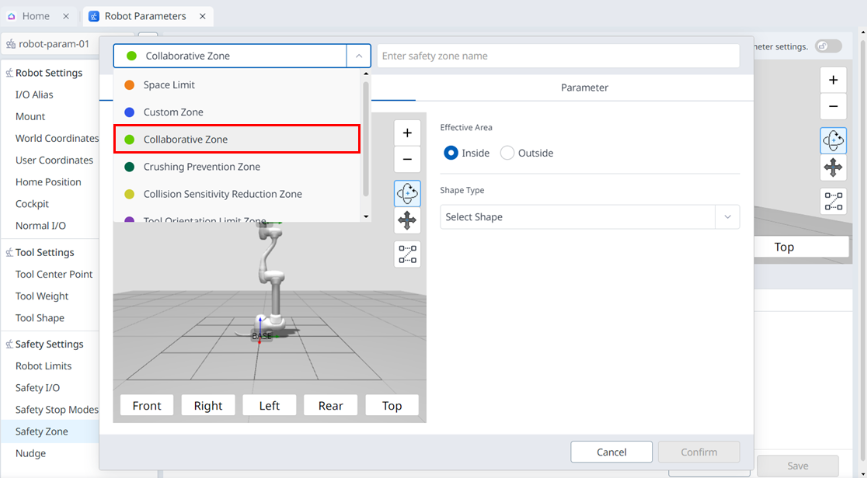
Festlegen des Bereichs für die Zusammenarbeit
Die Collaborative Zone ist eine Zone, die für den sicheren Umgang mit Robotern entwickelt wurde. Er bietet Robotergrenzen wie Verzögerungsraten, die für Arbeiten im Nahbereich erforderlich sind, und Einstellungen für den sicheren Stopp-Modus.
Sie können ihn festlegen, indem Sie unter Roboterparameter > Sicherheitsbereich > Hinzufügen > Popup oben links die Option „Collaborative Zone“ auswählen.
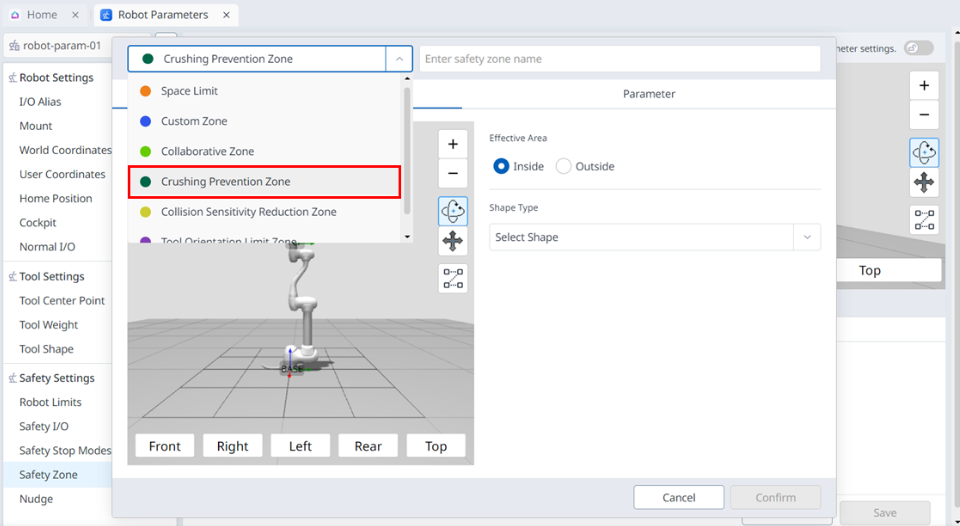
Einstellen der Zone zur Verhinderung von Quetschungen
Der Bereich zur Verhinderung von Quetschungen ist ein Bereich, der Quetschgefahren verhindert, die zwischen dem Roboter und anderen Objekten auftreten können. Wenn in dieser Zone die Grenze für Kollision und externe Kraft überschritten wird, ist der Sicherheitsstopp-Modus auf RS1 (Reflexstopp) festgelegt und die Kollisionsempfindlichkeit auf 100 % eingestellt. Wenn eine Kollision erkannt wird, reagiert der Roboter so sensibel wie möglich auf externe Kräfte und stoppt dann sicher durch Schwimmreaktion.
Sie können ihn festlegen, indem Sie unter Roboterparameter > Sicherheitsbereich > Hinzufügen > Popup oben links „Zone zur Verhinderung von Quetschungen“ auswählen.
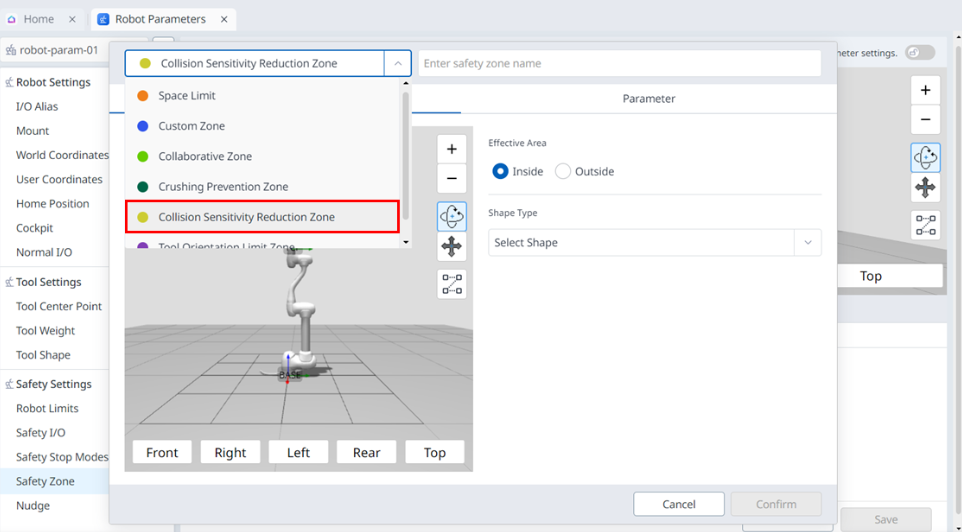
Einstellung des Bereichs für die Reduzierung der Kollisionsempfindlichkeit
Der Bereich zur Reduzierung der Kollisionsempfindlichkeit ist ein Bereich, der die Kollisionserkennung des Roboters bei der Arbeit mit verschiedenen Materialien oder Oberflächen anpasst. Sie bietet Einstellungen für Kraft- und Kollisionsempfindlichkeit.
Sie können ihn festlegen, indem Sie unter Roboterparameter > Sicherheitsbereich > Hinzufügen > oben links im Popup-Fenster „Kollisionsempfindlichkeit reduzieren“ die Option „Zone“ auswählen.
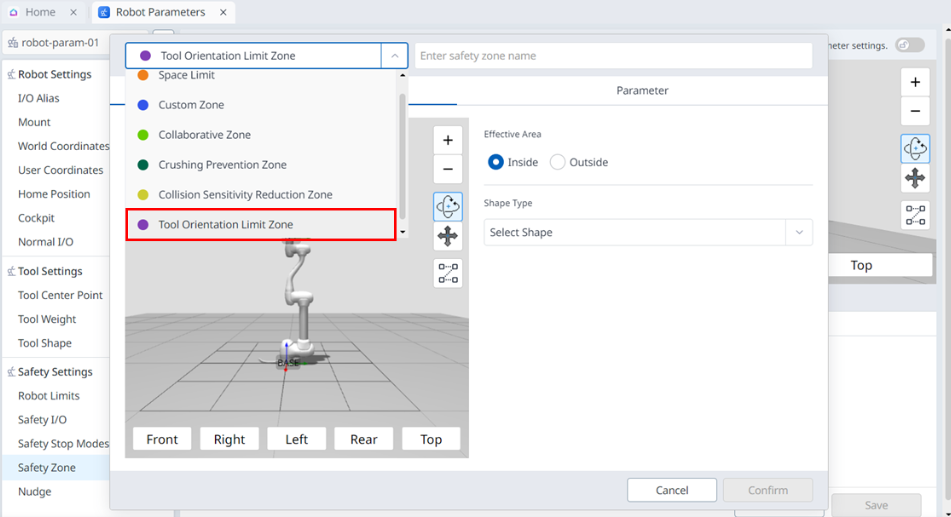
Festlegen des Bereichs für die Begrenzung der Werkzeugausrichtung
Der Bereich für die Begrenzung der Werkzeugausrichtung ist ein Bereich, der die Ausrichtung des TCP begrenzt. Sie stellt sicher, dass die TCP in eine bestimmte Richtung weist, und verhindert, dass sie in eine unsichere Richtung zeigt, indem die Richtung und der Winkelrand definiert werden.
Sie können ihn festlegen, indem Sie unter Roboterparameter > Sicherheitsbereich > Hinzufügen > oben links im Popup-Fenster „Zone für die Werkzeugausrichtung“ die Option „Zone für Begrenzungsgrenze“ auswählen.