|
Ne |
Položka |
Popis |
|---|---|---|
|
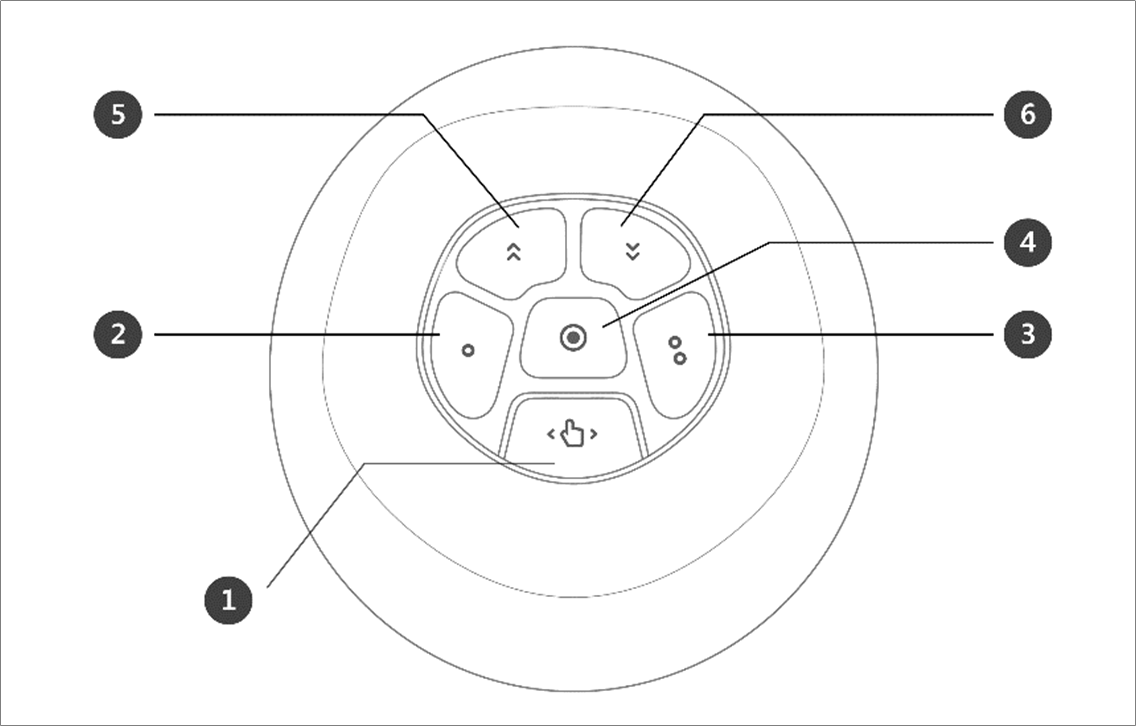
1 |
Tlačítko ručního navádění |
Toto tlačítko lze použít k nastavení nebo změně pozice robota. |
|
2, 3 |
Tlačítko pro nastavení uživatele |
Toto tlačítko může změnit pozici robota zadáním pozice podle podmínky uzamčení odpovídající režimu.
|
|
4 |
Tlačítko Uložit pozici |
Uloží aktuální pozici robota. |
|
5 |
Jedna linka nahoru |
Posune zaostření zobrazené na obrazovce o jednu čáru nahoru |
|
6 |
Jeden řádek dolů |
Posune zaostření zobrazené na obrazovce o jeden řádek dolů |
Přímá výuka (ruční vedení)
Ruční navádění slouží k držení konce robota rukama, které tlačí a tahají robota do požadované pozice a aplikují pózu na aktuálně zvolený pohyb.
Existují dvě metody přímé výuky.
-
Freedrive: Každý spoj se pohybuje ve směru, kterým uživatel použil sílu
-
Omezený pohyb: Konec robota se pohybuje nebo otáčí pouze ve směru nastaveném v omezeném pohybu, i když je síla aplikována z náhodného směru
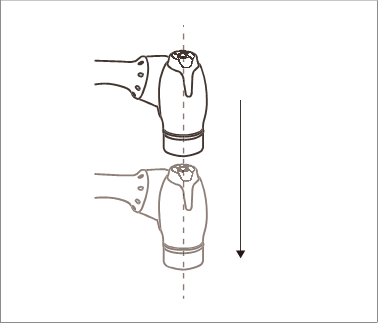
Freedrive
Po stisknutí tlačítka 1 se aktivuje režim Freedrive, který umožňuje volný pohyb robota. Každý spoj se pohybuje ve směru, kterým uživatel použil sílu. Po uvolnění tlačítka nelze robota pohybovat ručně.
-
Během přímého učení kontrolka LED robota bliká azurově.
-
Stisknutím tlačítka ručního vodítka na zadní straně závěsného zařízení Teach se aktivuje režim Freedrive, stejně jako stisknutím tlačítka 1, a robot lze volně pohybovat.
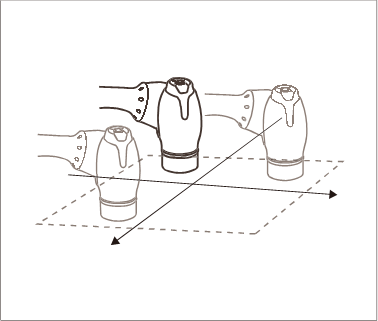
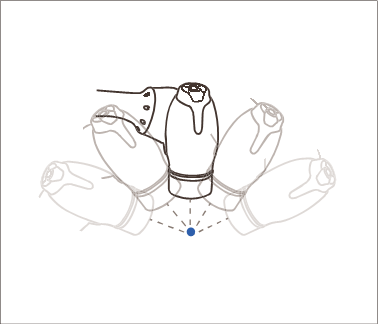
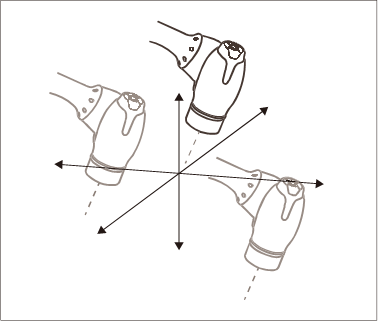
Omezený pohyb
Při stisknutí tlačítka 2 a tlačítka 3 se konec robota pohybuje pouze ve směru, který odpovídá podmínce omezení, i když je síla použita z náhodného směru. Podmínka omezení může být nastavena na 2 z 4 podmínek na následujícím obrázku: Omezená osa z, omezená rovina, omezená plocha a omezení směru.
Nastavení tlačítek kokpitu
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Obrázek v kokpitu |
Toto je obrázek pro nastavení Cockpit. |
|
2 |
Resetovat |
Toto tlačítko umožňuje inicializovat nastavené hodnoty. |
|
3 |
1 nastavení tlačítka |
Toto je část, kde můžete vybrat funkci, kterou chcete nastavit pro tlačítko 1. |
|
4 |
2 nastavení tlačítka |
Toto je část, kde můžete vybrat funkci, kterou chcete nastavit pro tlačítko 2. |
|
5 |
Nastavení tlačítek 1 + 2 |
Zde si můžete vybrat, zda chcete povolit upnutí tlačítek 1+2. |
|
6 |
Obrázek průvodce |
Vodící obrázek pro položky nastavení kokpitu. |
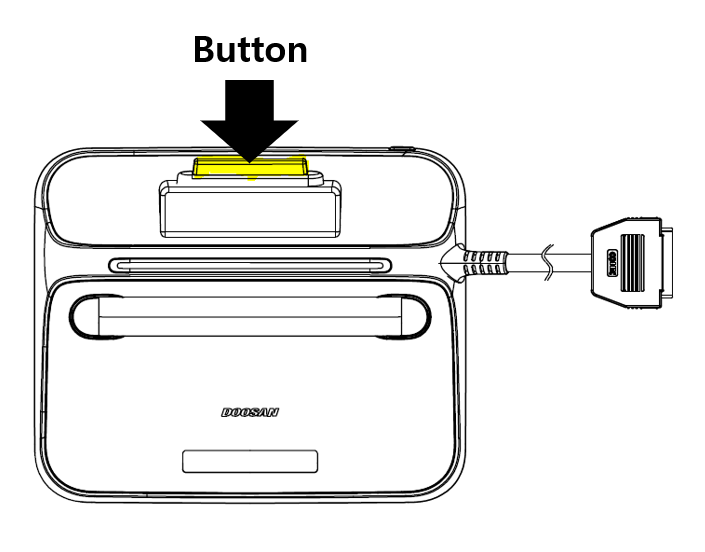
Získání stavu tlačítka Cockpit
Uživatel může získat informace o tom, zda je tlačítko Cockpit stisknuto nebo uvolněno.
Robot poskytuje funkci pro ovládání tlačítka Cockpit, což umožňuje jeho použití v různých aplikacích.
-
"Monitorovací data" v komunikačním API poskytuje informace o tlačítku Cockpit.
-
Pokud stisknete tlačítko Cockpit robota nebo naopak, můžete jej zjistit pomocí rozhraní DRL API.
-
DRL API: Get_cockpit_input (viz Programovací příručka).
-
Paramy: (int) index
-
Vrácení: (int) 1: Stisknuto (tlačítko je stisknuto), 0: Uvolněno (tlačítko není stisknuto)
-