Nastavení limitů robota
V limitech robota lze nastavit různé limity související s robotem. Tyto limity se používají k zajištění bezpečného provozu robota v rámci nastavených limitů.
Limity robota lze nastavit v parametrech robota > Nastavení bezpečnosti > limity robota.
-
Podrobný popis každého limitu naleznete v části limity robota.
Limity robotů jsou do značné míry rozděleny do 3 kategorií. Každá kategorie obsahuje následující obrazovky a funkce.
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
TCP/robot |
Velká klasifikace limitů robotů. |
|
3 |
Resetovat |
Slouží k resetování nastavení. |
|
4 |
Síla |
Používá se k nastavení síly. |
|
5 |
Napájení |
Používá se k nastavení výkonu. |
|
6 |
Rychlost |
Slouží k nastavení rychlosti. |
|
7 |
Momentum |
Používá se k nastavení hybnosti. |
|
8 |
Kolize |
Slouží k nastavení kolize. |
|
9 |
Uložit |
Slouží k uložení příslušného nastavení. |
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
Rychlost spoje |
Velká klasifikace limitů robotů. |
|
3 |
Resetovat |
Slouží k resetování nastavení. |
|
4 |
J1 |
Slouží k nastavení pro normální a snížené režimy. |
|
5 |
J2 |
Slouží k nastavení pro normální a snížené režimy. |
|
6 |
J3 |
Slouží k nastavení pro normální a snížené režimy. |
|
7 |
J4 (neaktivní pro modely řady P) |
Slouží k nastavení pro normální a snížené režimy. |
|
8 |
J5 |
Slouží k nastavení pro normální a snížené režimy. |
|
9 |
J6 |
Slouží k nastavení pro normální a snížené režimy. |
|
10 |
Uložit |
Slouží k uložení příslušného nastavení. |
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
Úhel kloubu |
Velká klasifikace limitů robotů. |
|
3 |
Resetovat |
Slouží k resetování nastavení. |
|
4 |
J1 |
Slouží k nastavení pro normální a snížené režimy. |
|
5 |
J2 |
Slouží k nastavení pro normální a snížené režimy. |
|
6 |
J3 |
Slouží k nastavení pro normální a snížené režimy. |
|
7 |
J4 (neaktivní pro modely řady P) |
Slouží k nastavení pro normální a snížené režimy. |
|
8 |
J5 |
Slouží k nastavení pro normální a snížené režimy. |
|
9 |
J6 |
Slouží k nastavení pro normální a snížené režimy. |
|
10 |
Uložit |
Slouží k uložení příslušného nastavení. |
Bezpečnost i/O.
Tato funkce se používá pro vstupní/výstupní bezpečnostní signály do redundantních terminálů. Pokud je některý z bezpečnostních vstupních/výstupních signálů detekován s jiným redundantním signálem, určuje přerušení obvodu nebo selhání hardwaru a zastaví robota v režimu zastavení sto.
-
Chcete-li nastavit bezpečnostní i/o, vyberte možnost parametry robota > Nastavení bezpečnosti > bezpečnostní i/o..
Další informace naleznete v části bezpečnostní signál i/o. .
Vstup
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
Vstup/výstup |
Pro nastavení lze vybrat buď vstup/výstup. |
|
3 |
Nastavení signálu |
Nastavení možností pro každý port.
Nepoužívá se Ochranný doraz (sto) (L) Nouzové zastavení (L) Ochranný doraz (L) Snížená rychlost (L) 3pólový spínač odblokování (L až H a H) Spínač odblokování ručního vedení (L až H a H) Ukončení HGC a obnovení úlohy (L až H) Ochranný doraz (automatické resetování a obnovení) (L) Dynamická aktivace bezpečné zóny (H) Režim dálkového ovládání (H) Nouzové zastavení (bez zpětného smyčky) (L) Chyba Reset & Resume (L až H) Resetování blokování (L až H) Ochranný doraz (SS1) (L) Ochranný doraz (SS2) (L) Dynamická aktivace bezpečné zóny (L) |
|
4 |
Vyberte, zda chcete signál ignorovat v závislosti na stavu robota |
Pokud vyberete signál „Ochranný stop“, můžete nastavit, zda chcete vybraný signál ignorovat v robotických stavech „MANUAL, RECOVERY, HGC“. |
|
5 |
Nastavte rychlost zpomalení |
Můžete nastavit rychlost zpomalení. Může být od 0 do 100. |
|
6 |
Uložit |
Toto tlačítko umožňuje uložit zadané nastavení. |
Výstup
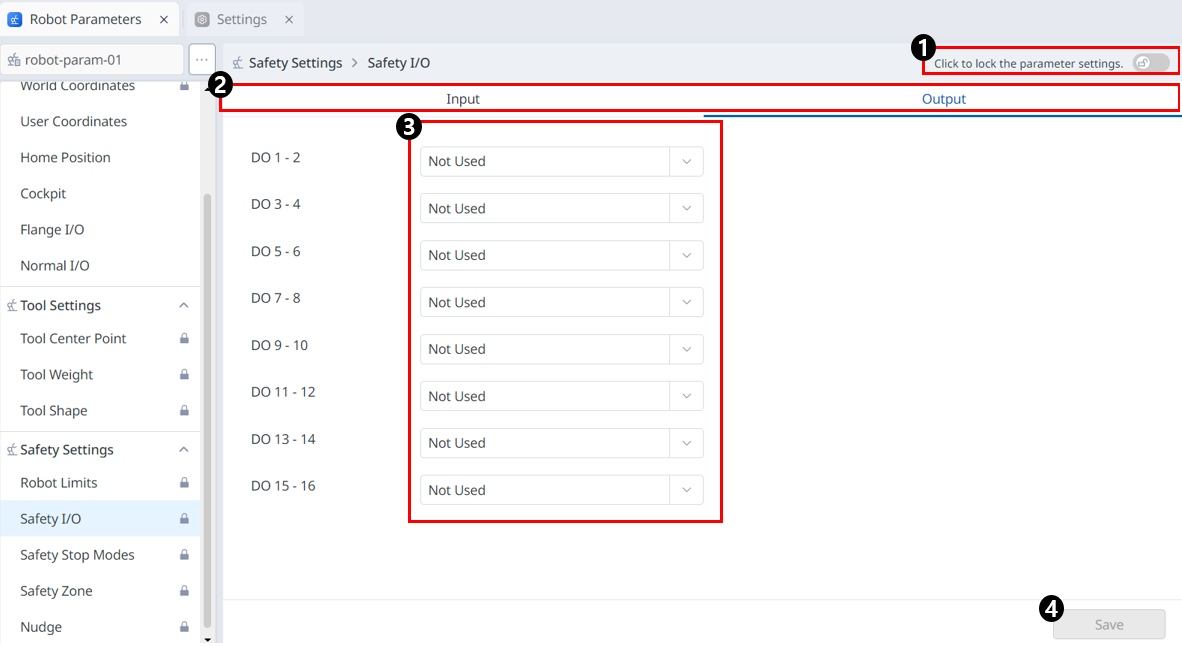
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
Vstup/výstup |
Pro nastavení lze vybrat buď vstup/výstup. |
|
3 |
Nastavení signálu |
Nastavení možností pro každý port.
Nepoužívá se Bezpečné vypnutí točivého momentu (sto) (L) Bezpečný provozní doraz (SOS) (L) Stav normální rychlosti (L) Stav snížené rychlosti (L) Automatický režim (L) Ruční režim (L) Samostatná zóna (L) Zóna spolupráce (L) Zóna s vysokou prioritou (L) Omezená zóna orientace nástroje (L) Nouzové zastavení (L) Nouzové zastavení (bez vstupu zpětného smyčky) (L) Označená zóna (L) Režim dálkového ovládání (L) Je třeba resetovat blokování (L) Stav navádění (L) |
|
4 |
Uložit |
Toto tlačítko umožňuje uložit zadané nastavení. |
Nastavení režimů nouzového zastavení
Seznamte se s typy bezpečnostních zarážek a s tím, jak zapnout/vypnout bezpečnostní zarážku.
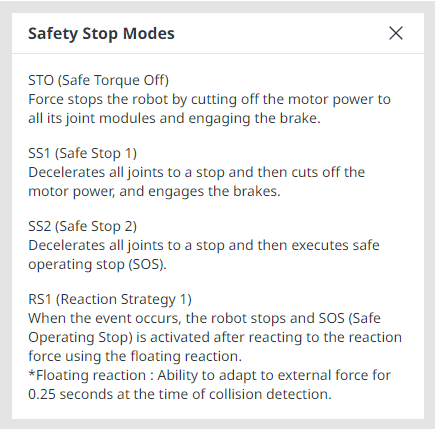
Druhy bezpečnostních zastavení
Režimy zastavení, které jsou k dispozici pro zajištění bezpečnosti uživatele, jsou následující:
-
Sto (bezpečné vypnutí točivého momentu): Zastaví Servo Off (napájení motoru je okamžitě vypnuto)
-
SS1 (bezpečný stop 1): Servo vypnuto po maximálním zastavení zpomalení
-
SS2 (bezpečný stop 2): Pohotovostní režim po maximálním zastavení zpomalení (pauza)
-
RS1: Při kolizi splňuje směr opačný než kolize a poté vstoupí do pohotovostního režimu (lze nastavit pouze v případě kolize detekce/porušení limitu síly TCP)
Roboty Doosan Robotics mají dva typy funkcí bezpečnostního zastavení. Nouzové zastavení se používá pro všeobecné nouzové situace a robot může po uvolnění nouzového zastavení pokračovat v provozu se zapnut Servo. V případě ochranného zastavení může robot pokračovat v provozu řešením příčiny ochranného zastavení a uvolněním zarážky.
-
Nouzové zastavení: Nastaví režim zastavení, když je aktivováno tlačítko nouzového zastavení závěsného zařízení Teach nebo dodatečně nainstalovaného externího zařízení
-
Aktivuje se při stisknutí spínače nouzového zastavení závěsného zařízení Teach nebo tlačítka připojeného k terminálu TBSFT EM.
-
Lze vybrat pouze sto nebo SS1.
-
-
Ochranný doraz: Nastaví režim zastavení, když je aktivováno externě připojené ochranné zařízení
-
Aktivuje se, když je aktivováno ochranné vybavení připojené k terminálu TBSFT PR.
-
Další informace o funkcích bezpečnostního zastavení naleznete v části bezpečnostní funkce.
Jak zapnout/vypnout bezpečnostní zarážky
Stiskněte tlačítko nouzového zastavení na závěsném ovladači Teach nebo aktivujte bezpečnostní zařízení připojené k bezpečnostnímu vstupnímu/výstupnímu panelu, abyste aktivovali nouzové zastavení. Bezpečnostní zařízení lze připojit k nouzovému zastavení nebo ochrannímu zastavení prostřednictvím parametrů robota > Nastavení bezpečnosti > bezpečnostní funkce i/o na obrazovce závěsného zařízení Teach.
-
Další informace o připojení bezpečnostního zařízení k bezpečnostnímu vstupnímu/výstupnímu modulu naleznete v části připojení ovladače i/o..
-
Informace o nastavení funkce bezpečnostního zastavení pro toto připojení v programu naleznete v části bezpečnostní signál i/o..
Unknown Attachment
Nabídka
|
Položky |
Popis |
|
|---|---|---|
|
1 |
Tlačítko pro přepnutí zámku |
Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
|
2 |
Informační zpráva |
Zpráva s informacemi potřebnými pro nastavení. |
|
3 |
Resetovat |
Tlačítko pro resetování nastavení. |
|
4 |
Nouzové zastavení |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 |
|
5 |
Ochranný doraz |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: SS1 SS2 |
|
6 |
Porušení limitu úhlu kloubu |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 SS2 |
|
7 |
Porušení limitu rychlosti spoje |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
|
8 |
Porušení limitu točivého momentu spoje |
K dispozici je pouze sto. |
|
9 |
Detekce kolizí |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 RS1 |
|
10 |
Porušení limitu polohy robota TCP |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 SS2 |
|
11 |
Porušení limitu orientace TCP |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
|
12 |
Porušení omezení rychlosti TCP |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozbalovací nabídka obsahuje následující položky: Sto (kromě řady H/P) SS1 SS2 |
|
13 |
Porušení limitu síly TCP |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
|
14 |
Porušení limitu hybnosti |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
|
15 |
Porušení mechanického limitu |
Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
|
16 |
Uložit |
Toto tlačítko umožňuje uložit hodnoty nastavení. |
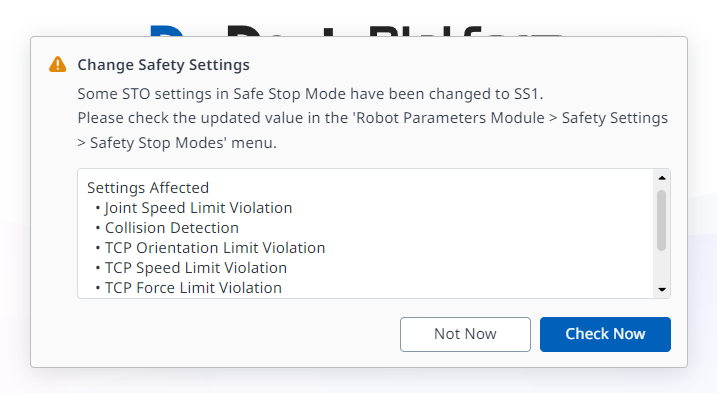
Poznámka
Na informační zprávě se zobrazí následující překryvné okno:
Poznámka
Od verze 3,2.2 byla některá nastavení sto v režimech bezpečnostního zastavení modelu H změněna na SS1.
Pokud byly používané hodnoty aktualizovány, zobrazí se následující překryvné okno.