
工具中心点设置
配置工具中心点 (TCP) 时,还必须定义基于法兰坐标的位置和旋转角度。从法兰坐标的默认起点到 X、Y 和 Z 方向上的工具中心点 (TCP) 的距离不能设置为大于 10000 mm 的值。 此外,如果 X、Y 和 Z 的转换长度 (
特别是,如果使用 Auto Calculate(自动计算)配置 TCP,则仅基于 X、Y 和 Z 位置进行计算,因此需要输入旋转角度。旋转角度可以用 A、B 和 C 三项定义,它基于“欧拉 Z-Y-Z”旋转方法。
用 x、y、z 表示的坐标轴和用 X、Y、Z 表示的坐标轴定义如下:
- “法兰坐标”(x, y, z) 的坐标轴:在法兰末端定义的坐标轴方向与机器人关节角度为 (0,0,0,0,0,0) 的机器人坐标相同。
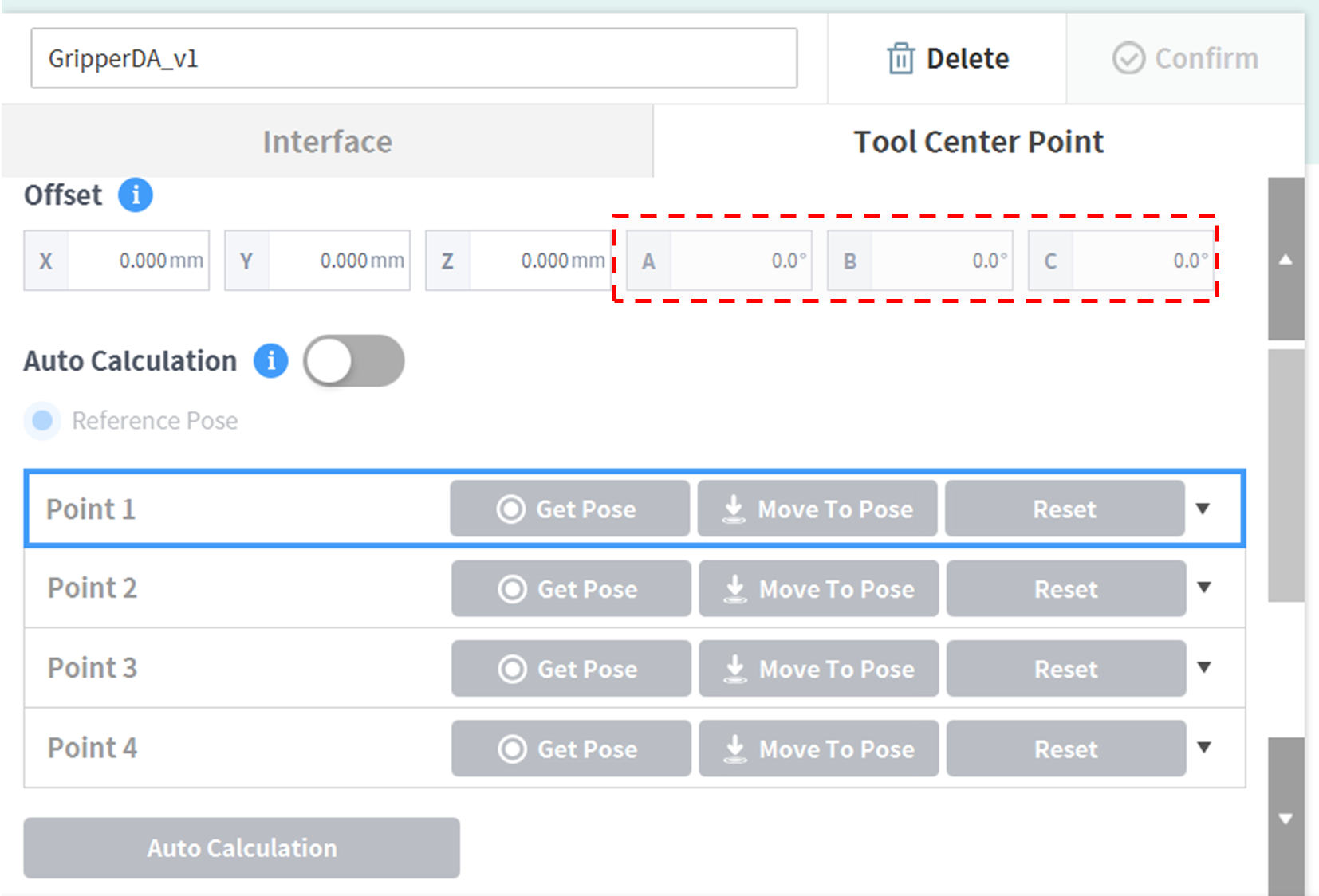
- “TCP 坐标”(X,Y,Z) 的坐标轴:坐标轴定义在安装在法兰末端或工作点的工具末端。“TCP 坐标”的旋转角度基于“法兰坐标”进行定义,顺序如下:
1) 沿着法兰坐标的 z 轴旋转 A 度
2) 沿着 1) 中旋转后的坐标的 y' 轴旋转 B 度
3) 沿着 2) 中旋转后的坐标的 z’’ 轴旋转 C 度
以下是根据上述方法配置 TCP 的几个示例:
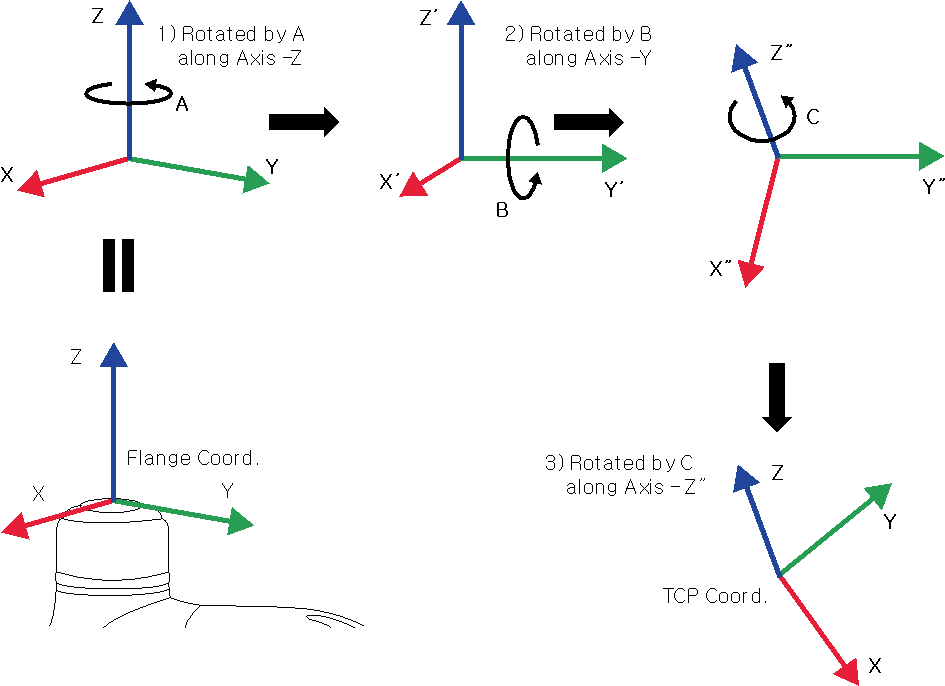
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]:具有 Z 方向偏移的通用夹持器(TCP 坐标)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]:具有 45 度角度的左侧夹持器(TCP 坐标,左侧)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]:具有 45 度角度的右侧夹持器(TCP 坐标,右侧)