尝试强制命令样本
可选 正常 20 分钟

此示例在任务编写器中创建。此示例在任务构建器中的尝试方式几乎相同。
小心
- 在尝试样本之前,请确保阅读并遵循 使用注意事项。有关详细信息,请参阅 第 1 部分 .安全手册。
- 此示例需要在中创建任务编写器文件 尝试遵循性命令示例。
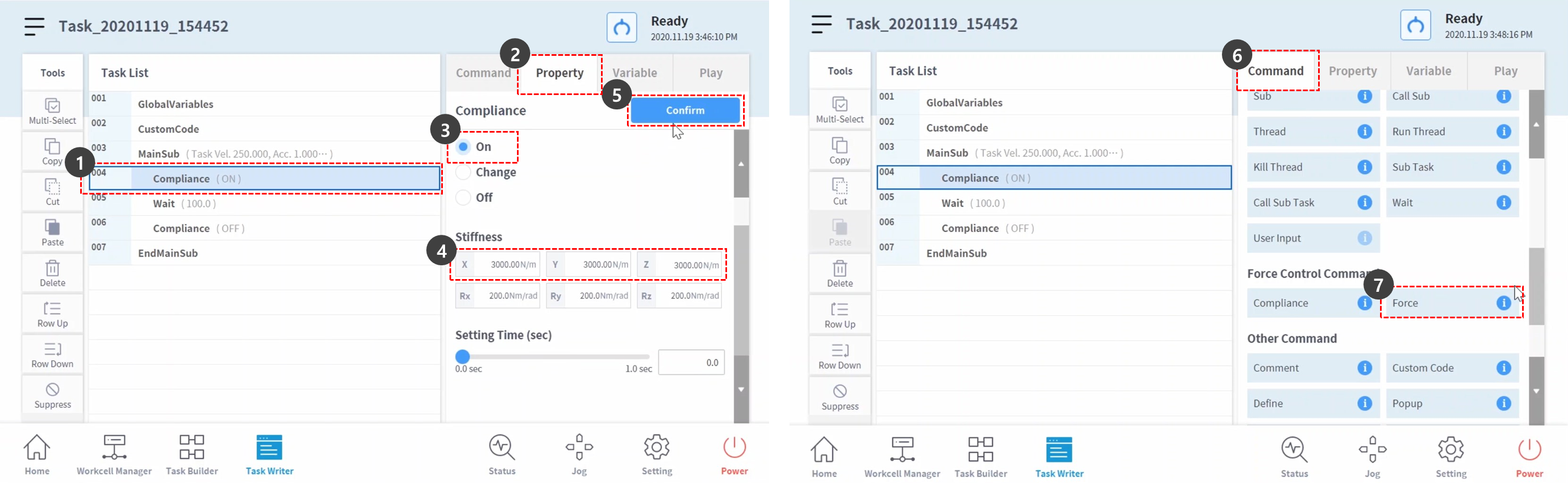
- 尝试遵循性命令示例 打开创建的“任务编写器”文件,并在任务列表的第四行选择兼容性命令。
- 选择属性选项卡。
- 将模式设置为以下:模式打开启用合规性控制。只有在启用合规性控制时,强制命令才可用。
- 模式:开
- 将默认刚度值设置为以下值:
- X , Y , Z :3000 N/m (默认)
- Rx , ry , Rz :200 牛米 / 半径 (默认)
- 按确认按钮。
- 选择命令选项卡。
- 添加强制命令。此命令计划用于启用强制控制。
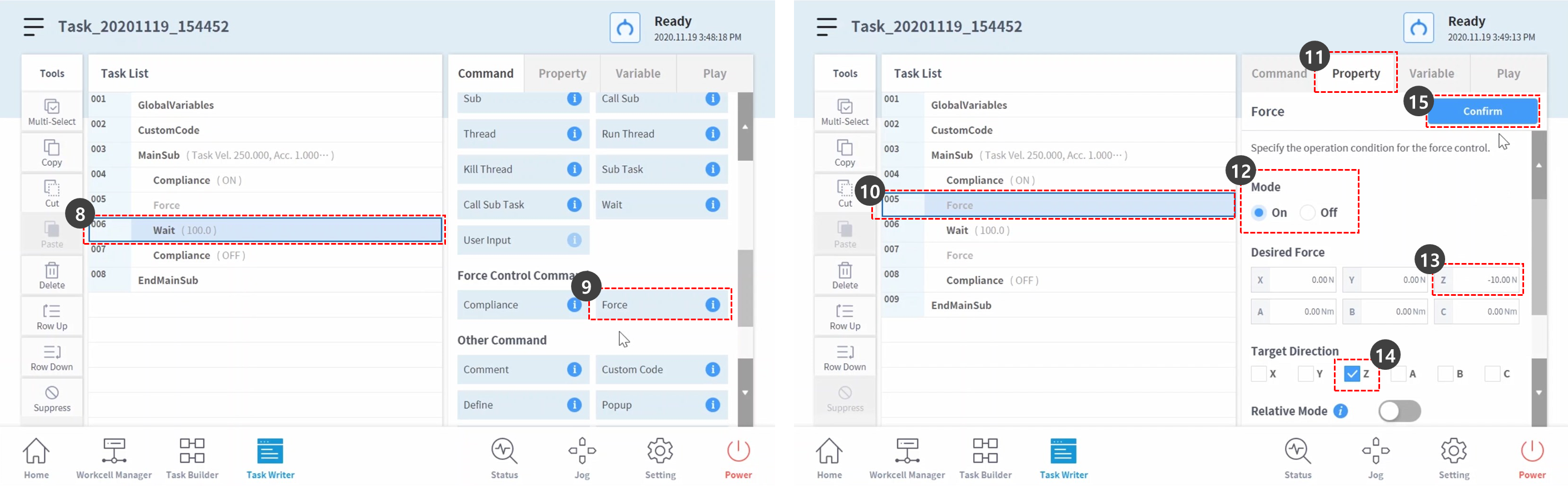
- 选择任务列表的第六行。
- 添加强制命令。此命令计划用于禁用强制控制。
- 从任务列表的第五行中选择强制命令。
- 选择属性选项卡。
- 将模式设置为以下:模式打开启用强制控制。
- 模式:开
- 将所需力设置为以下值:
- X :0 N (默认)
- Y :0 N (默认)
- Z :-10 牛
- Rx , ry , Rz :200 牛米 / 半径 (默认)
- 仅检查目标方向的 Z 轴。
- 按确认按钮。
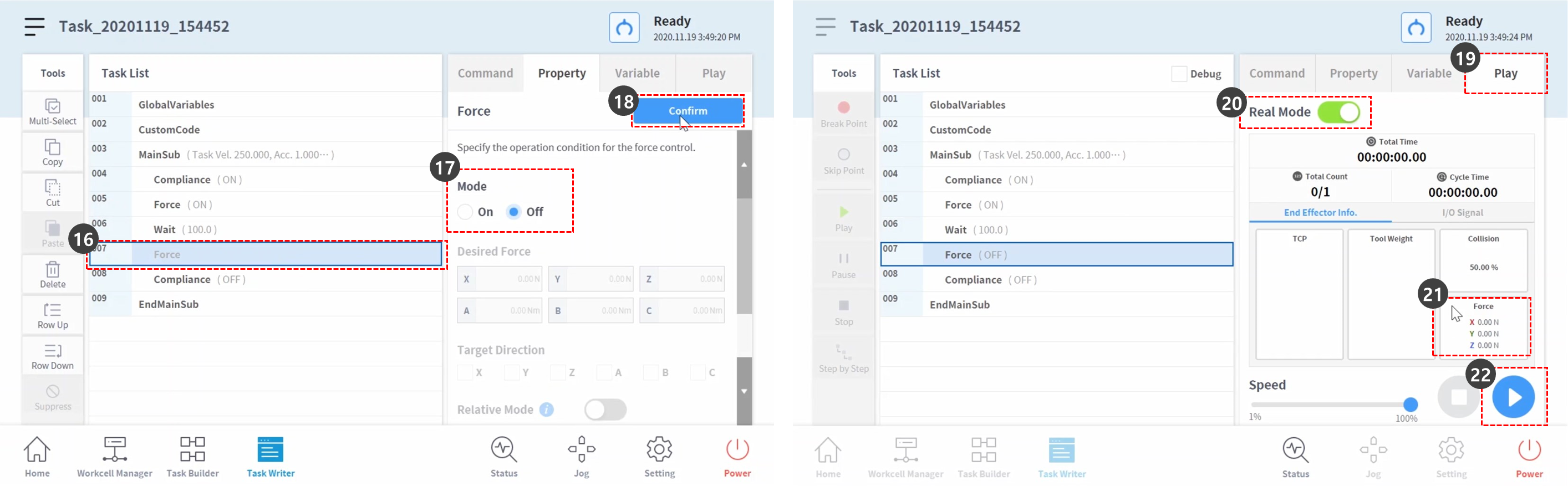
- 从任务列表的第七行选择“强制”命令。
- 将模式设置为以下:模式关闭禁用强制控制。
- 模式:关
- 按确认按钮。
- 选择播放选项卡。
- 启用 Real Mode 切换按钮。
- 启用切换按钮后,按钮将呈绿色亮起。
- 检查每个轴的 TCP 力是否为 0。此力值是当前应用于机械手末端 TCP 上的外部力的大小。
- 按播放按钮。
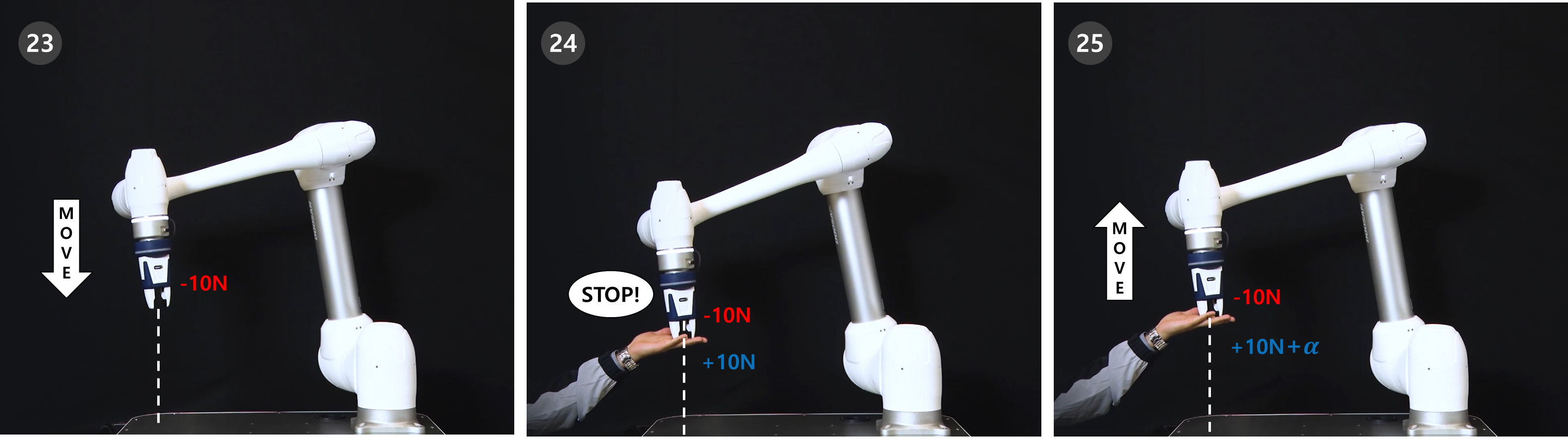
- 在机械手末端 TCP 上施加 -10N 的力,导致机械手沿 Z 轴方向缓慢移动。
- 机械手末端沿 +Z 轴方向 (与机械手移动方向相反) 排斥机械手移动。当移动机械手的力和排斥机械手移动的力达到平衡时,机械手将保持其位置,就像停止一样。
- 如果对机械手施加的力大于 +10N ,机械手将遵守对机械手施加的力,并沿力方向移动。