
基于目标对齐
在工件沿轴方向与 TCP 对齐以进行工件示教时,此功能非常实用。要在锁定位姿后执行示教,可以通过操作台按钮使用面或线锁定的直接示教功能。
要基于目标对齐机器人 TCP,请执行以下步骤:
- 选择 Align(对齐)选项卡,然后选择 Parallel-To-Target(与目标平行)选项卡。
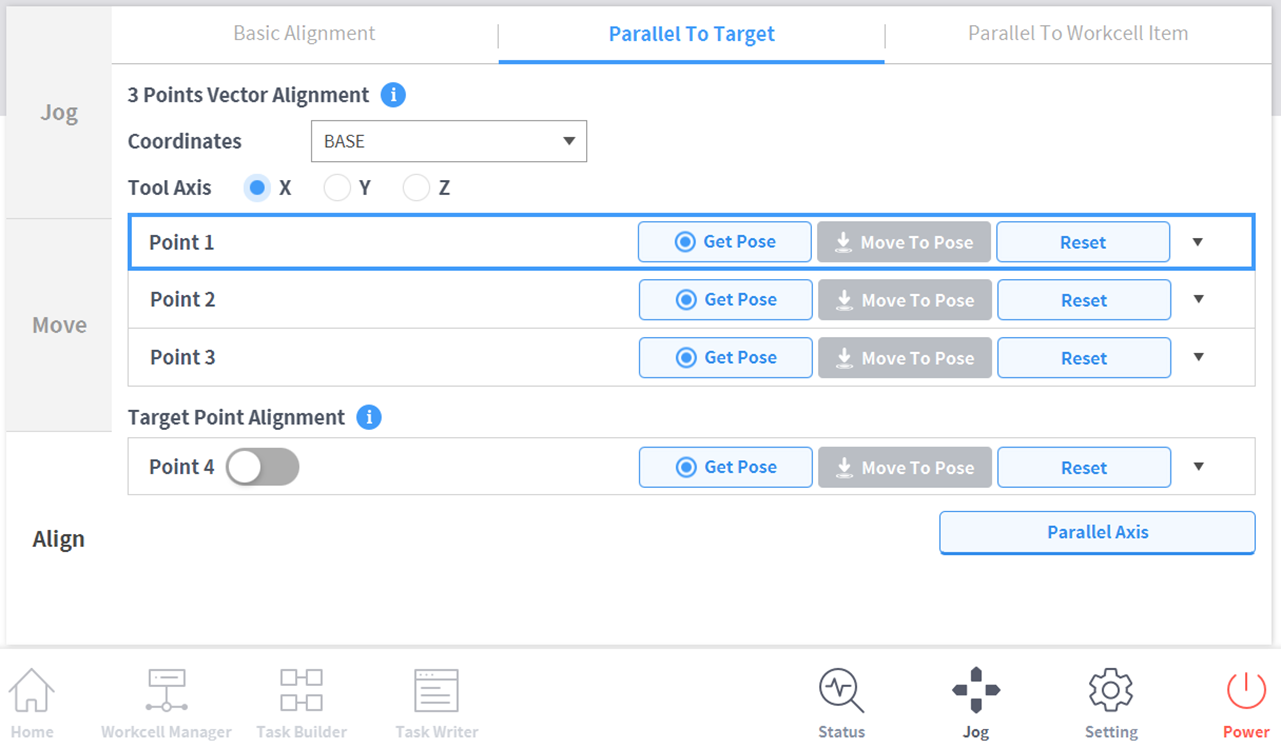
- 选择对准时使用的参考坐标。

- 选择要对齐的工具轴。

- 将机器人移至所需位置,然后点击 Point 1(点 1)。
- 点击 Point 1(点 1)的 Save Pose(保存位姿)按钮。
- Point 2(点 2)和 Point 3(点 3)设置方式相同。设置完成后,虚拟矢量区域便基于这三个点设置完毕。

- Point 2(点 2)和 Point 3(点 3)设置方式相同。设置完成后,虚拟矢量区域便基于这三个点设置完毕。
- (可选)如需同时设置 TCP 方向和位置,可按下 Point 4 (点 4)的“Toggle”(切换)按钮,将机器人移至预定位置,然后点击“Save Pose”(保存位姿)按钮。
- 点击并按住 Align Axis(对齐轴)按钮以对齐轴。
- 将 6 轴头部放置在目标上方沿 Z 轴方向 150 mm 处。