
根据底座坐标轴/世界坐标轴对准
沿着机器人的底座/世界坐标轴方向定位工作项时,可以在工件示教前对准工件上的 TCP。示教位姿可以按照底座/世界坐标轴进行配置,以便于指定示教位姿。要在锁定位姿后执行示教,可以通过 Cockpit(操作台)按钮使用面或线锁定的直接示教功能。
要基于底座轴对齐机器人 TCP,请执行以下步骤:
- 选择 Align(对齐)选项卡,然后选择 Basic Alignment(基本对齐) 选项卡
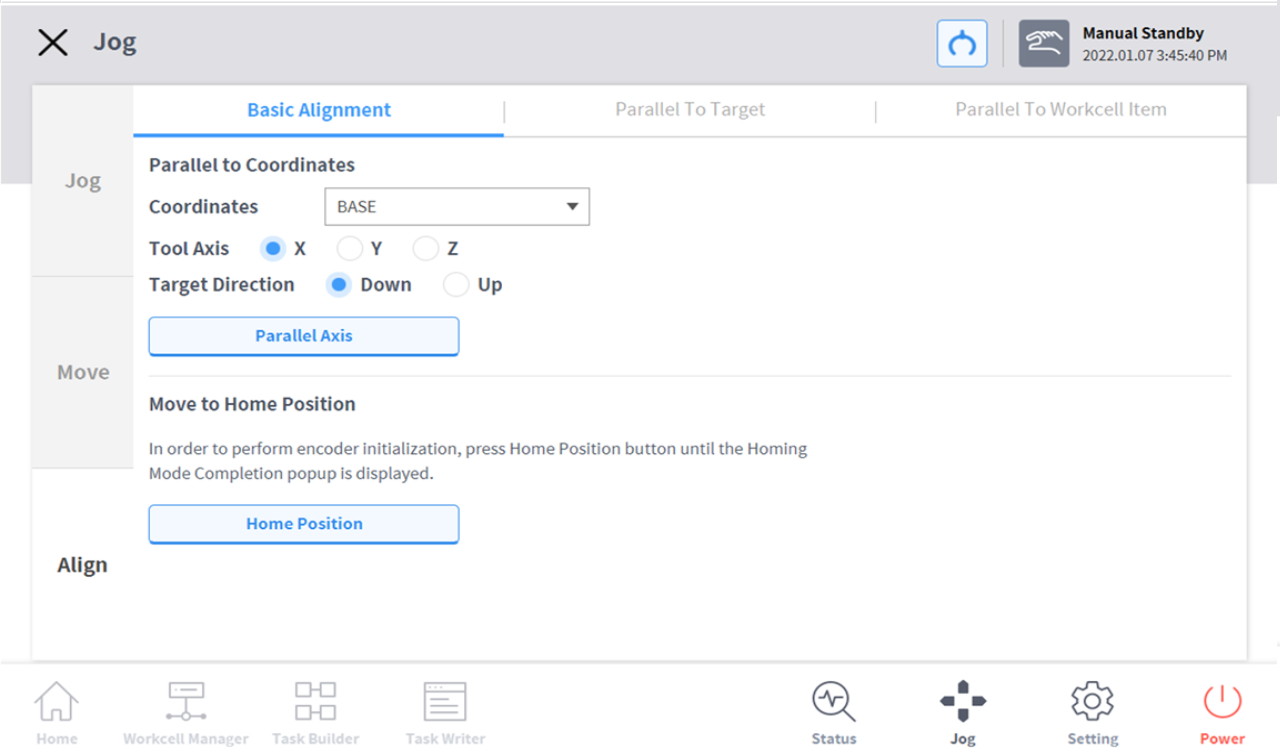
- 选择对准时使用的参考坐标。

- 选择参考工具轴。

- 选择对齐方向。

- 点击并按住 Align Axis(对齐轴)按钮以对齐轴。