
Nudge 设置
如果机器人在协作区域内因安全停止模式 SS2 或 RS1 而停止,则可以通过 Nudge 输入重置中断状态并且可以恢复任务。可以在用户自定义部分中启用 Nudge 选项。
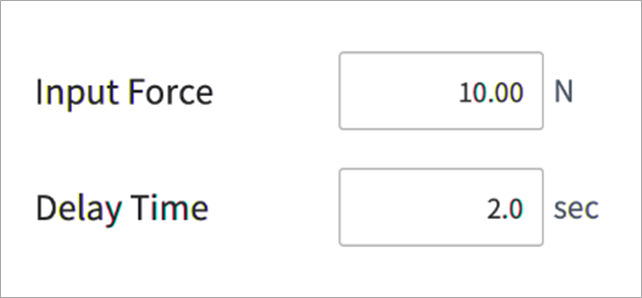
要设置 Nudge,请从 Robot(机器人)工作单元中选择 Nudge 项。通过 Nudge 输入,可以额外输入要识别的力(轻推力)和从轻推识别直到恢复作业期间的待机时间(延迟时间)。
Nudge 输入力的可配置范围为 10.00 ~ 50.00N。
警告
- 仅在通过全面风险评估批准后才能使用 Nudge 。