
世界坐标设置
可以设置表示机器人和工件的坐标系。该坐标系称作世界坐标,它不同于固定在底座上的底座坐标。可以使用世界坐标设置底座坐标的位姿,在 Task Builder 和 Task Writer 中使用机器人进行示教和移动时,可以选择世界坐标。要设置世界坐标,可以在 Robot(机器人)工作单元上点击 
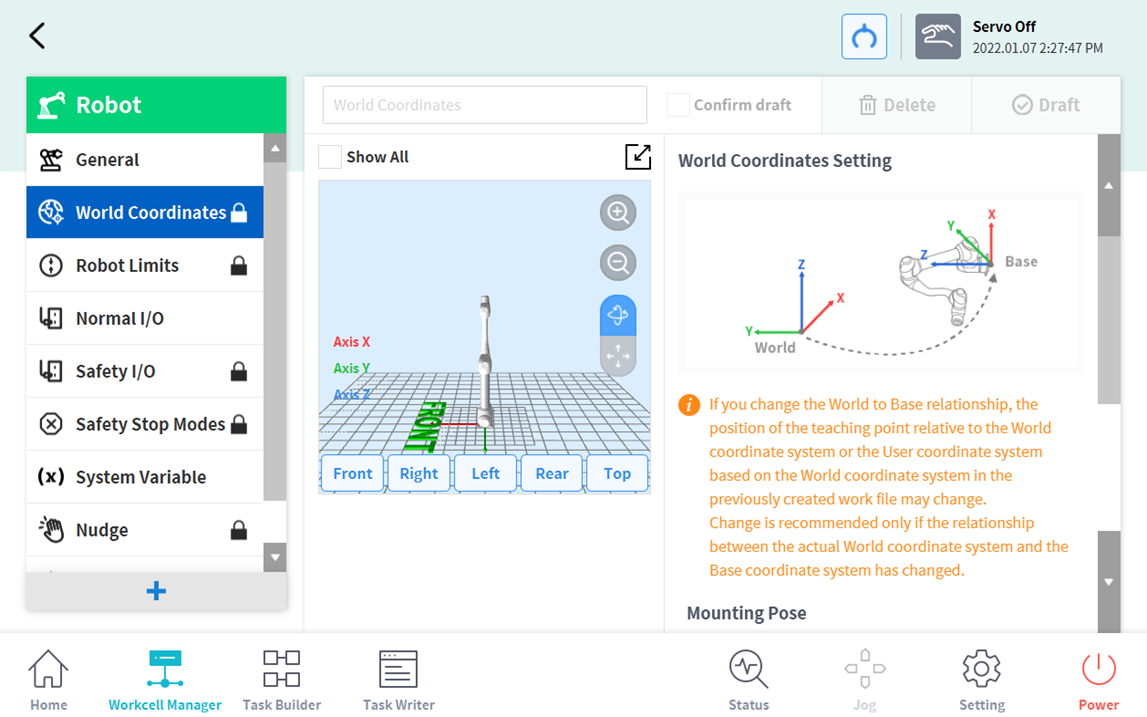
- 点击顶部的 Edit(编辑)按钮。
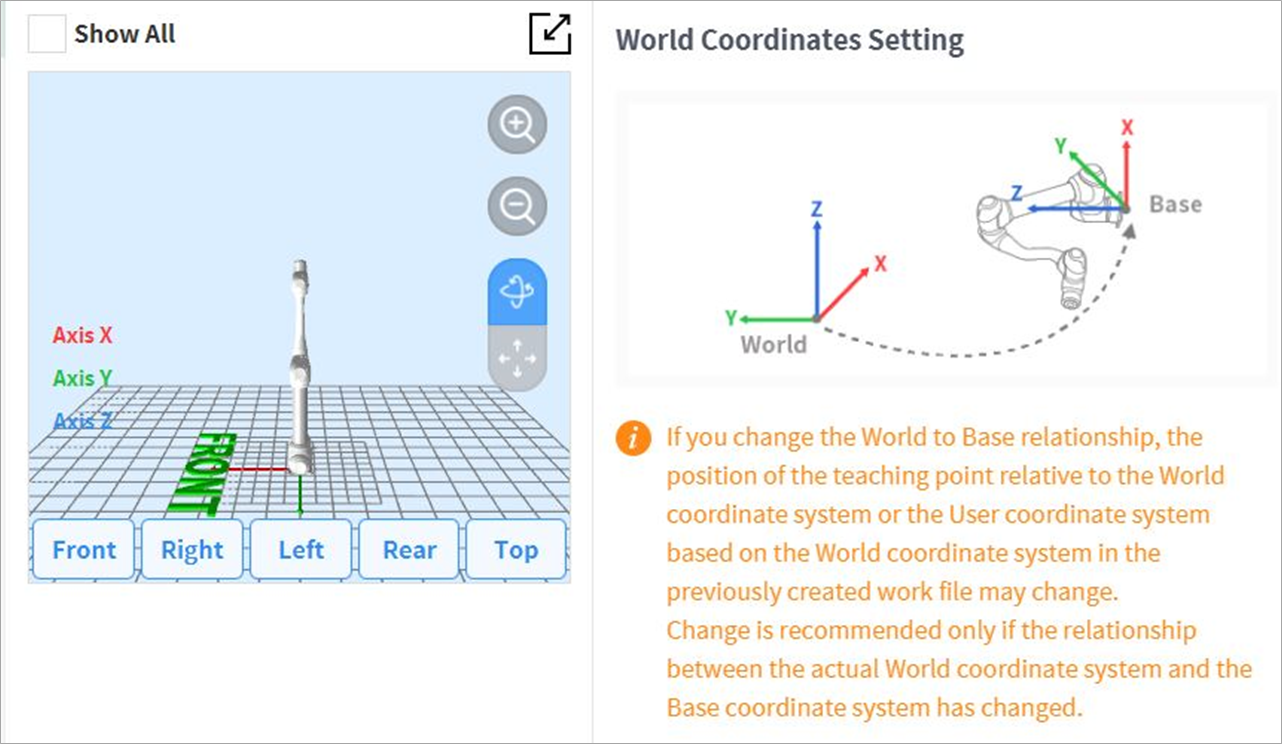
请参见世界坐标与底座坐标之间关系的示意图,以及相关注意事项。
警告
如果更改世界坐标与底座坐标之间的关系,则世界坐标的示教点或者基于世界坐标的用户坐标会发生变化。建议仅在世界坐标与底座坐标之间的实际关系发生变化时再进行更改。
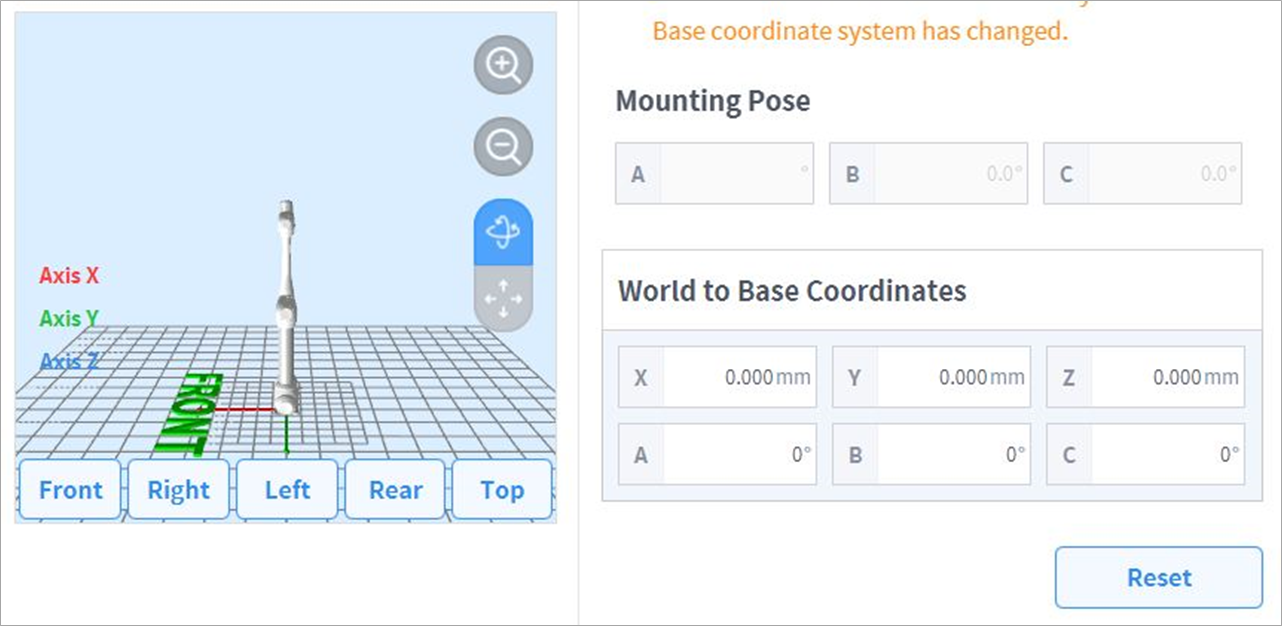
安装位姿(安装倾斜度)显示在右侧中间处。一般而言,世界坐标表示的是用户角度的工作环境,因此世界坐标的 Z 方向是朝向顶棚的方向。由于底座坐标有一个轴固定在机器人的底面,因此世界坐标与底座坐标之间的关系会根据机器人的安装位置/位姿而发生变化。上图中假定机器人安装在墙壁上。这种情况下,底座坐标的 Z 轴垂直于墙壁,与世界坐标的 Y 轴平行,安装位姿倾斜度及旋转角度分别显示为 90 度和 0 度。世界坐标与底座坐标之间的关系为底座坐标基于世界坐标。如果预先定义了工作环境布局,则应相应设置坐标系。根据欧拉 Z-Y-Z 定义,值 X/Y/Z 表示移动,值 A/B/C 表示旋转。如果安装位姿是根据机器人安装位姿定义的,则可以相应使用 B/C 旋转角度作为安装位姿 B/C。但是,如果安装位姿是使用自动假定功能设置的,则假定值可能存在偏差,因而建议使用根据环境布局定义的旋转角度。
- 点击 Apply(应用)按钮。
- 点击 Confirm(确认)按钮。
注
如果在 GF020400 之前的软件版本中用户程序是在应用安装倾斜角后使用 Task Builder 和 Task Writer 创建的,则在软件版本更新为高于 GF020400 的版本后,这些用户程序在设置世界坐标时必须应用安装倾斜角,并要在用户程序中将所有底座坐标转换为世界坐标,以便正确使用现有的示教点。
如果多台机器人在同一作业空间内工作,或者如果将机器人安装在诸如移动底座或直线轨道等移动装置上,则工件与机器人底座之间的关系和示教点位置可能会发生变化。在这种环境下,可以设置易于示教作业和共享的世界坐标。
安装或更换工具后,必须先配置工具重量,然后再操作机器人。有关设置工具重量的更多信息,请参见 工具重量设置。