更新
机械手更新>更新 菜单提供使用更新文件更新系统的功能。
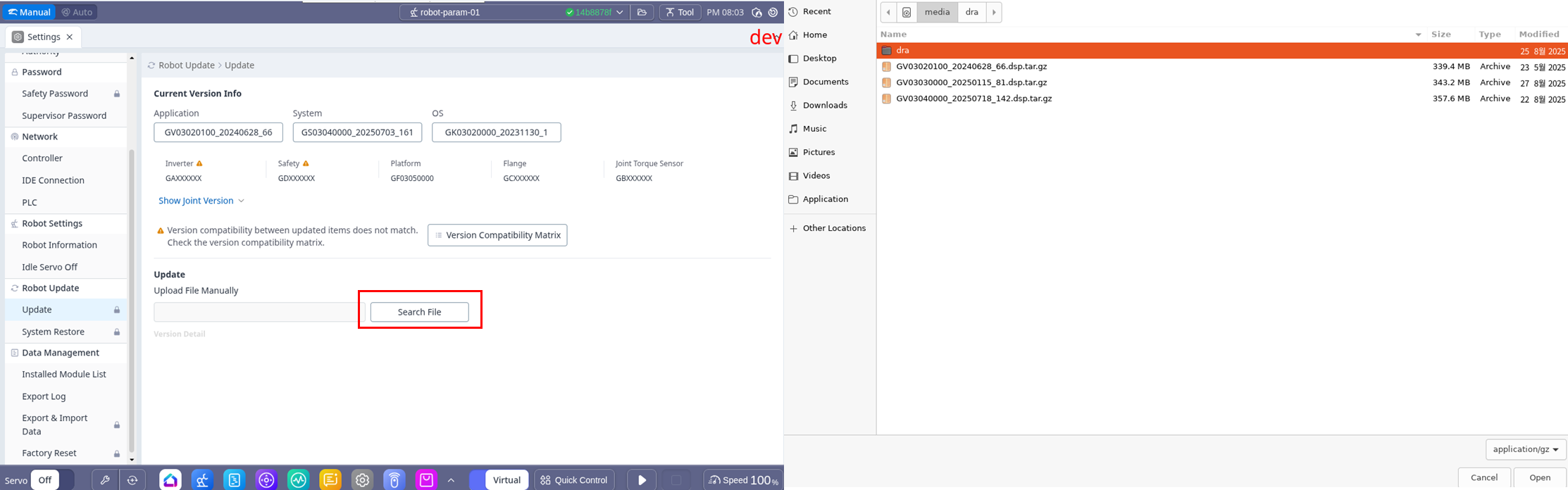
在更新区域中上载所需的更新文件。上传完成后,将出现"更新"按钮,您可以通过该按钮执行更新。
准备更新文件
更新软件包文件可以从 斗山机器人RobotLab网站下载。
小心
-
更新时,您必须按GS→GV的顺序执行更新。
-
更新文件以dsp.tar.gz格式提供。请勿解压缩文件;按原样上传文件以继续更新。
更新方法
更新可以通过以下两种方式执行。
-
从教学手控盒更新(USB)
-
从RobotLab网站下载更新软件包文件。
-
将更新软件包文件复制到USB驱动器并将其插入控制器。
-
在"教学手控盒"的"设置"→"更新"选项卡中,从USB驱动器中选择更新软件包文件。
-
-
从外部笔记本电脑更新(Dart平台)
-
从RobotLab网站下载更新软件包文件。
-
启动Dart Platform, 然后在"设置"→"更新"选项卡中选择笔记本电脑上的更新软件包文件。
-
注意
-
需要管理员模式
-
手动模式状态
-
连接到实际控制器的状态
菜单
|
项目 |
说明 |
|
|---|---|---|
|
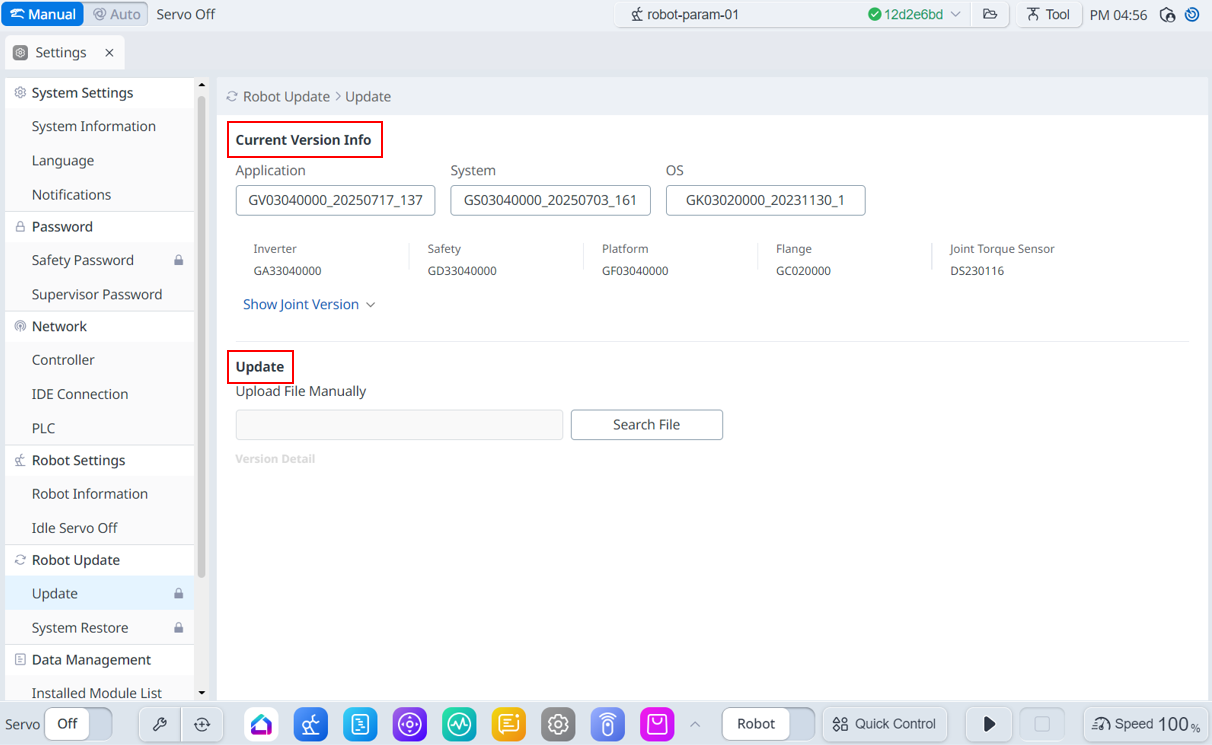
1 |
当前版本信息 |
显示当前应用程序/系统/OS版本信息。 |
|
2 |
更新 |
您可以手动下载更新文件。 |
注意
对于JTS型号,还会显示JTS信息。
-
当您开始更新时,将执行包装检查。包装检查完成后,将显示更新屏幕,如下所示。
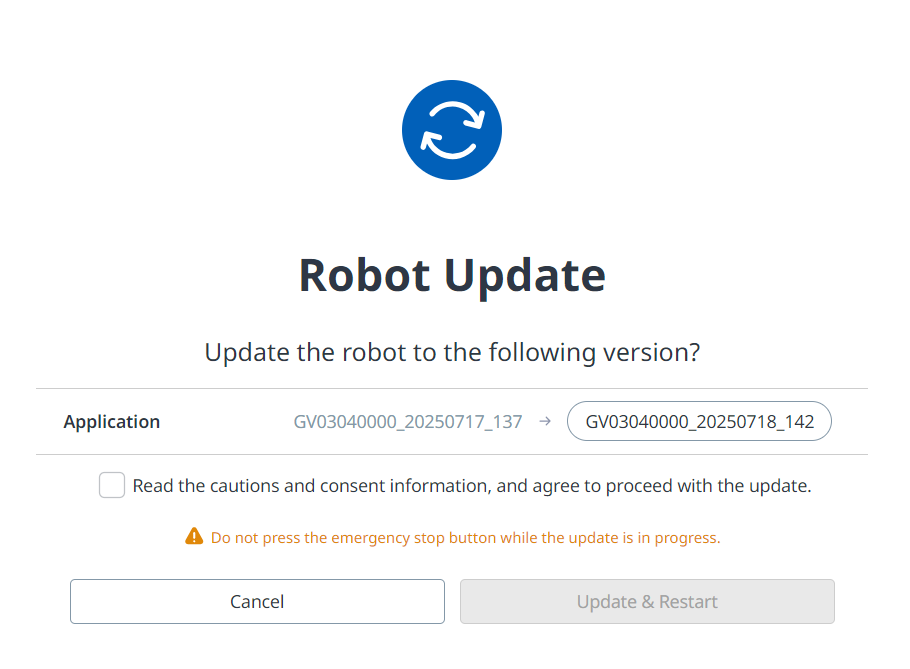
注意
更新期间显示的更改注释以平台语言设置(设置→语言)中设置的语言提供。
-
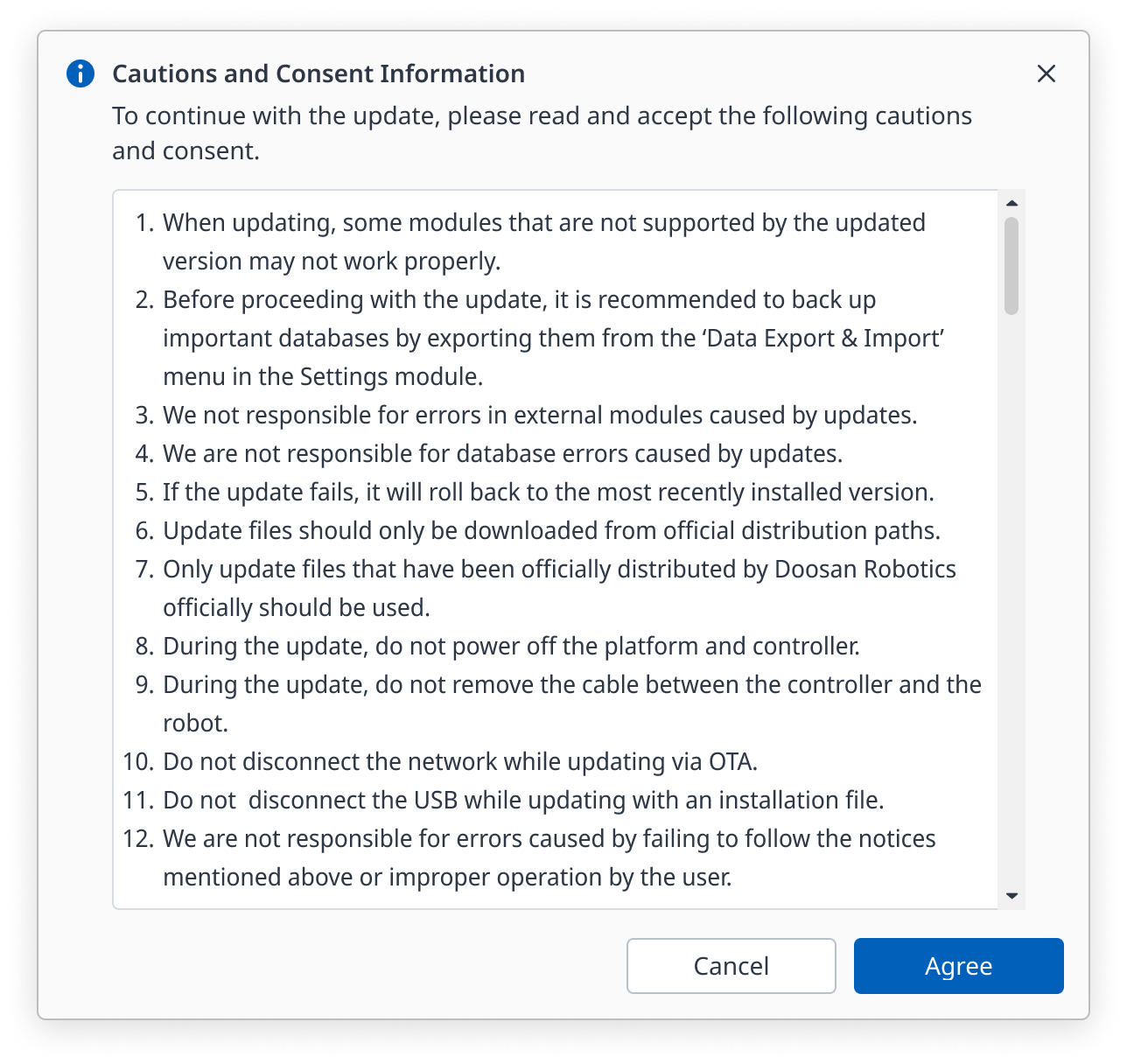
在执行更新之前,请阅读有关预防措施和同意信息的详细信息。
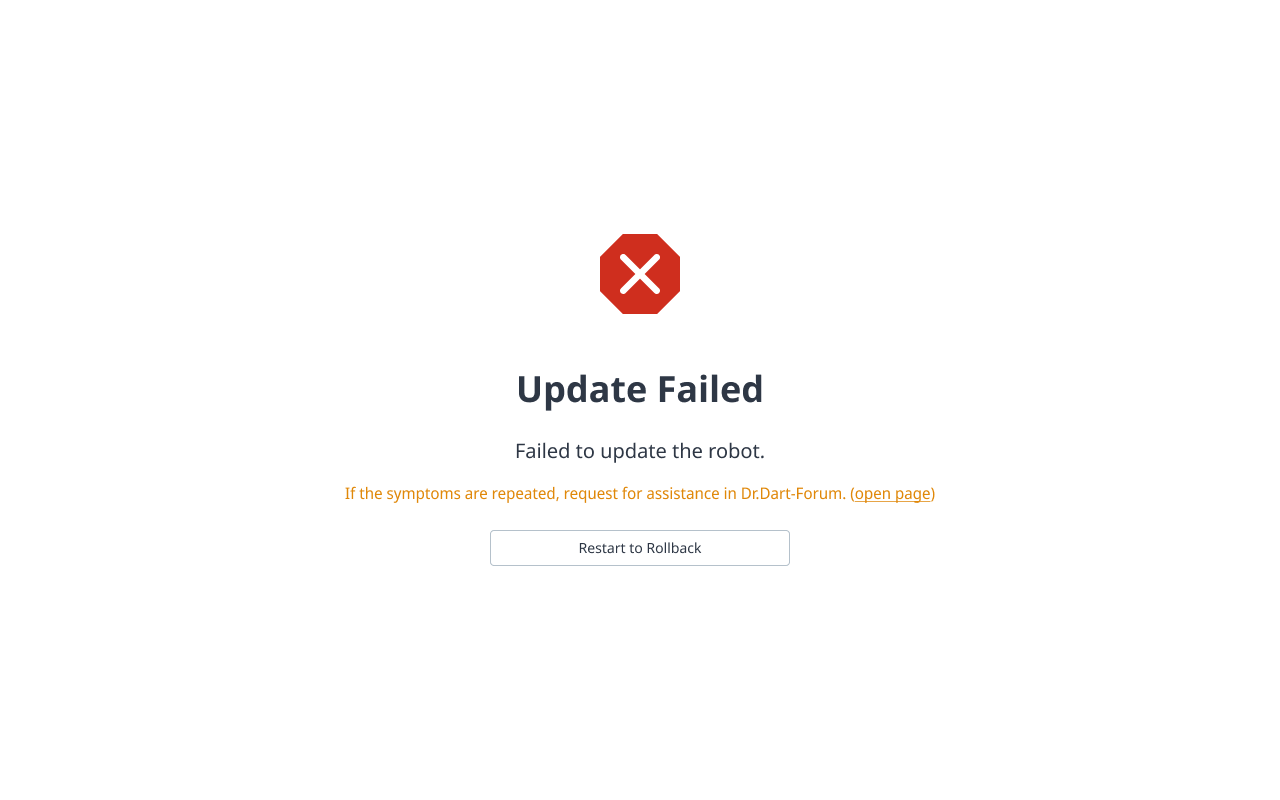
-
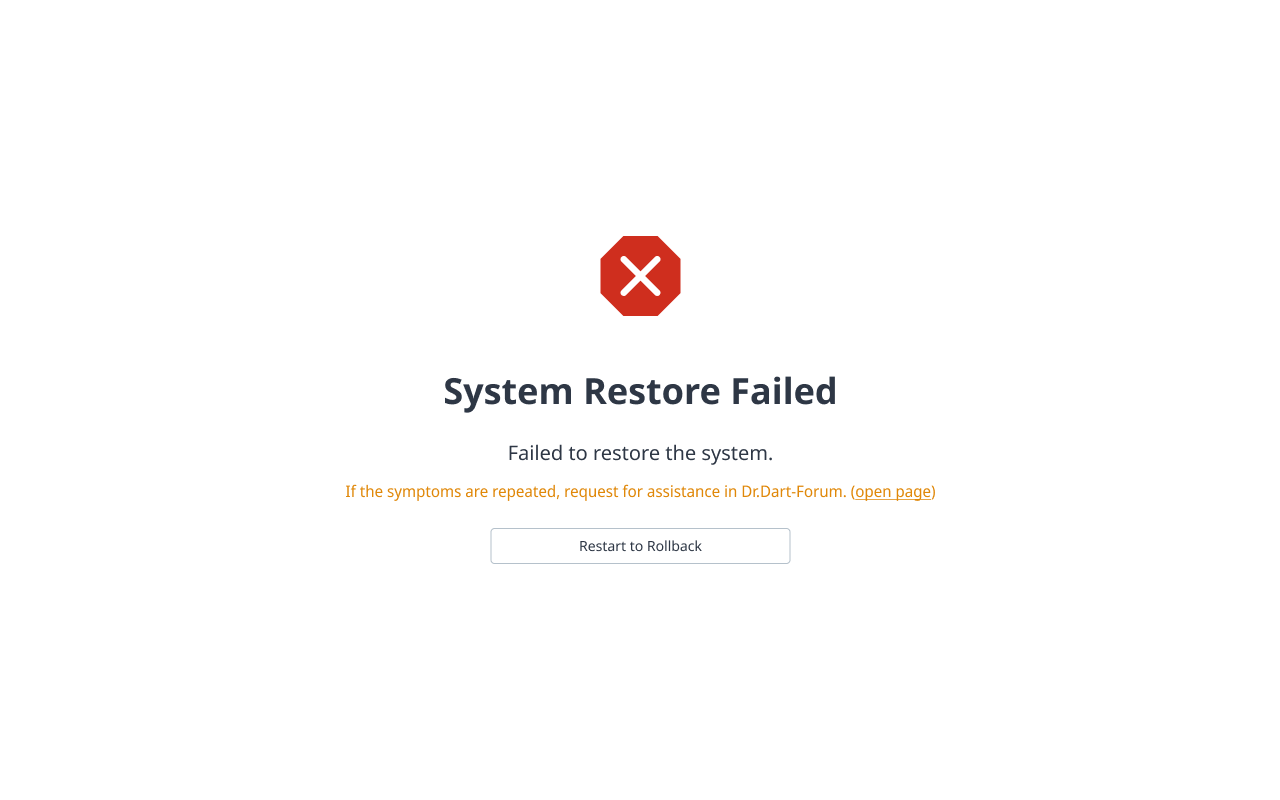
如果更新失败,将执行回滚。如果回滚失败,将显示下面的屏幕,您可以单击"重新启动以回滚"按钮再次执行回滚。
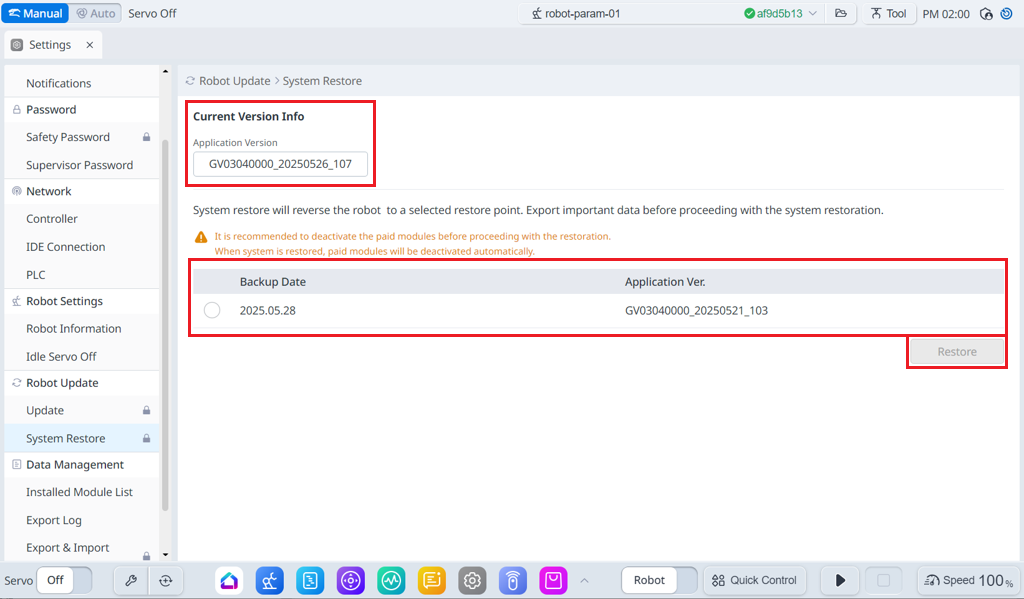
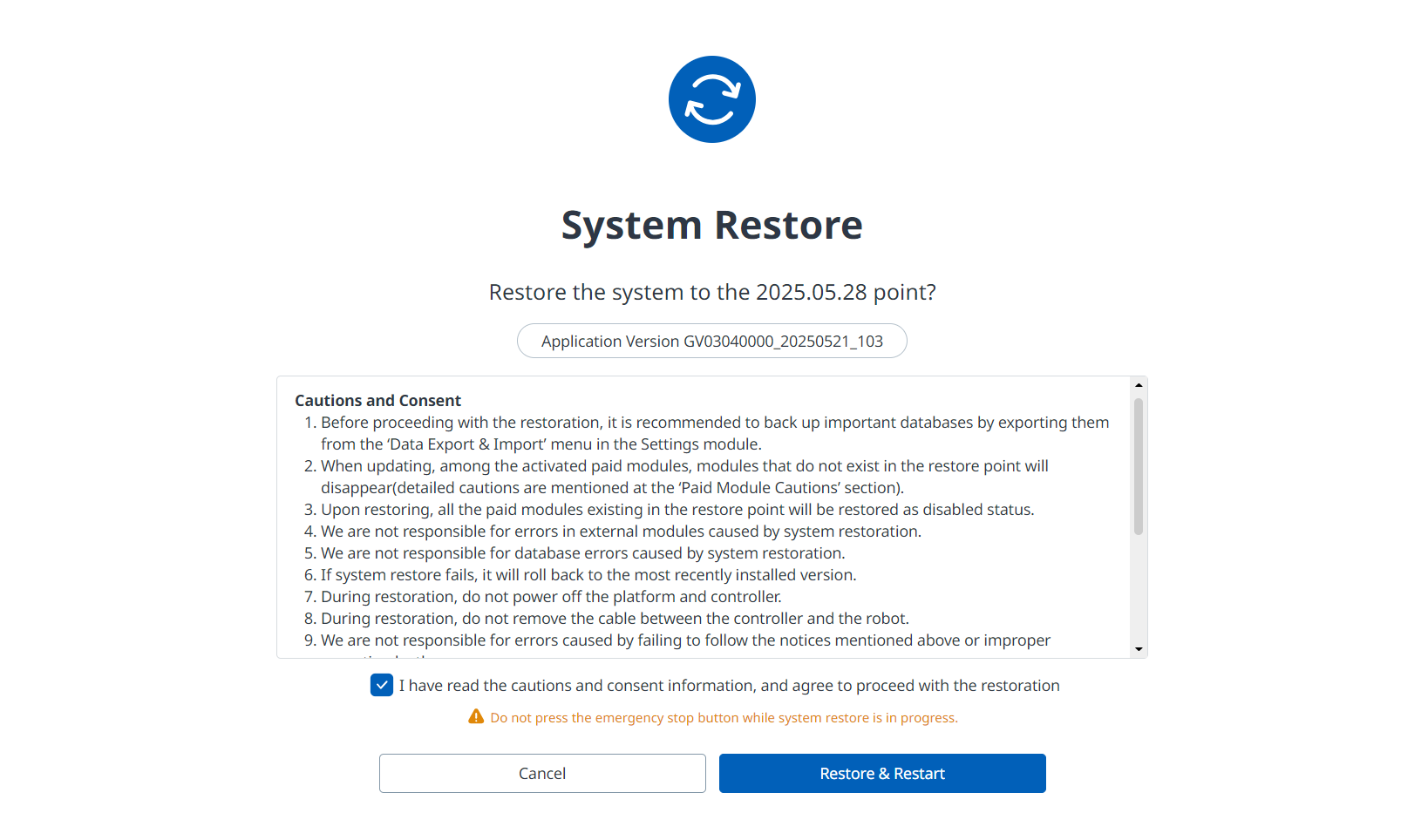
系统还原
" 机械手更新 ">" 系统还原" 菜单提供了根据更新信息还原系统的功能。
-
从备份列表中选择所需的还原点,然后单击还原按钮。
注意
-
需要管理员模式
-
手动模式状态
-
连接到实际控制器的状态
小心
-
如果安装了付费模块,建议将其禁用。
-
请勿在还原过程中更改控制。
-
如果在还原过程中退出程序,则会保留当前版本。
-
执行出厂重置将删除您的还原点。
菜单
|
项目 |
说明 |
|
|---|---|---|
|
1 |
当前版本信息 |
显示当前应用程序/系统/OS版本信息。 |
|
2 |
备份列表 |
它显示可备份的还原版本列表。列表中的项目在使用更新功能更新时创建。 |
|
3 |
还原 |
当您选择还原版本列表时,还原按钮将激活。 |
-
在执行"还原和重新启动"之前,请检查"注意"和"同意"信息的详细信息。
-
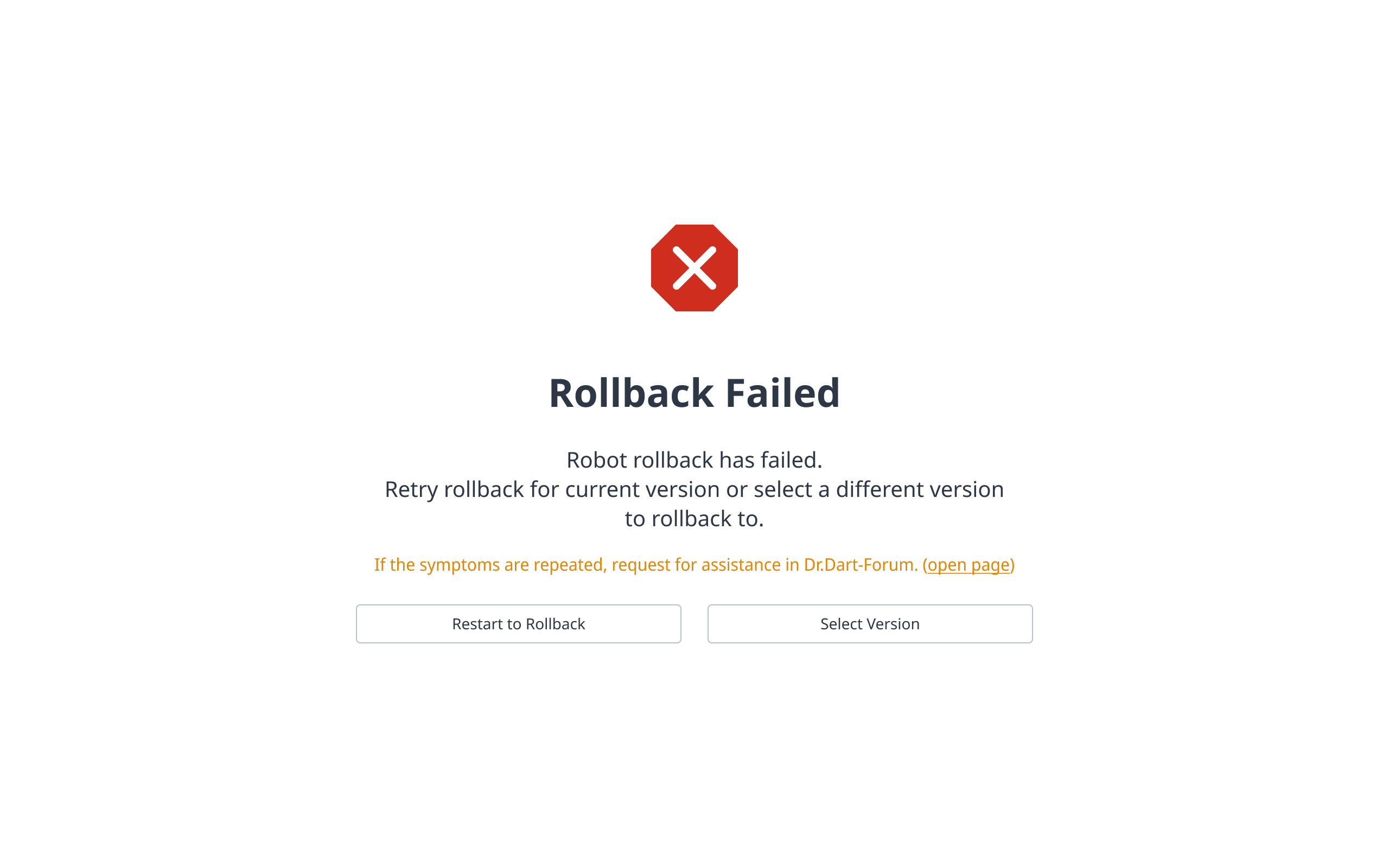
如果还原失败,您将看到以下屏幕。要继续回滚,请单击"重新启动以回滚"按钮。
-
如果回滚操作失败,您将看到以下屏幕,您可以再次尝试回滚或选择其他版本以执行还原。